一种多智能体系统的二分包容控制方法
本发明涉及多智能体系统分布式控制领域,特别涉及一种在脉冲攻击和拓扑切换共同影响下多智能体系统的二分包容控制方法。
背景技术:
1、在过去几年中,具有合作竞争交互作用的多智能体系统的分布式控制问题由于其广泛的应用而引起了研究人员的关注,包括二分编队控制、领导—跟随二分一致性、多个柔性操纵器等。多智能体系统的领导—跟随二分状态一致性控制的目标是,提出分布式控制协议,使得所有追随者智能体的状态最终可以收敛至领导者智能体的状态或负状态。此外,在定位导航、环境感知和人机交互等多个工程应用中,往往会出现多个领导者智能体的情况,此种情况下,多智能体系统的二分包容控制问题逐渐成为了研究热点。
2、多智能体系统是基于局部交换的信息进行智能体之间的通信,因而容易遭受对抗性攻击,例如虚假数据注入攻击、欺骗攻击等,近年来,多智能体系统的安全同步控制问题引起了人们极大的研究兴趣。同时,多智能体系统的符号图网络拓扑,由于网络实际环境的干扰,其网络拓扑不可能保持不变,必将是切换变换的。现有的研究只针对诸如对抗性攻击或确定性脉冲单一因素影响下的二分同步/一致性问题,然而实际的信息/物理网络中可能会同时存在恶意的信息/物理攻击、确定性脉冲或随机脉冲完了安全干扰。然而,在对抗性攻击和切换拓扑的背景下,现有文献没有充分研究在脉冲攻击和拓扑切换共同影响下具有多个领导者的多智能体系统的二分包容控制问题。
技术实现思路
1、发明目的:实际网络环境中可能会同时存在恶意的信息攻击、拓扑切换等多种网络干扰因素,而现有研究仅是针对单一因素影响下的二分包容控制问题的现状,本发明研究提出一种脉冲攻击和拓扑切换共同影响下多智能体系统的二分包容控制方法。
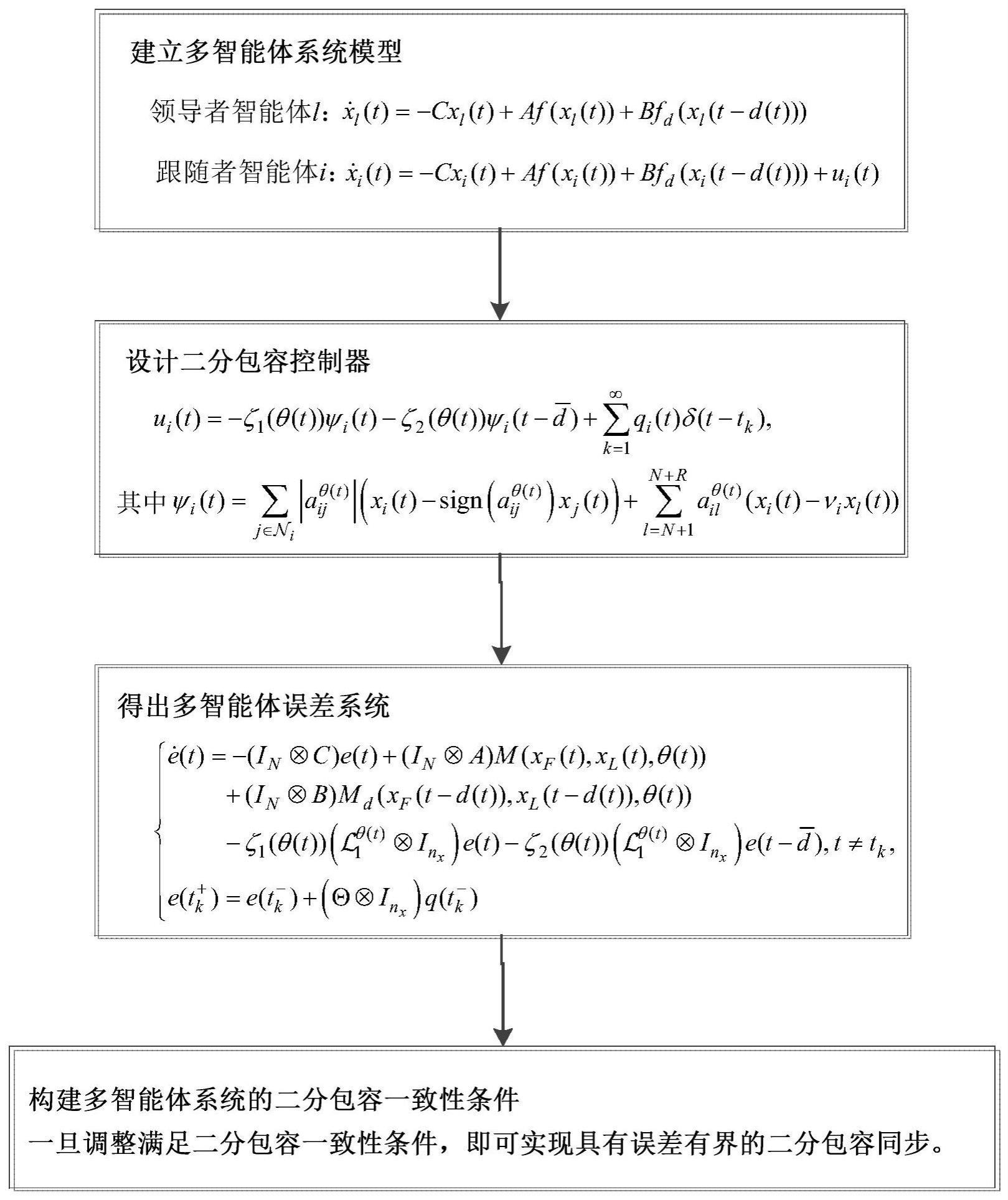
2、技术方案:一种多智能体系统的二分包容控制方法,包括如下几个步骤:
3、(ⅰ)多智能体系统模型建立
4、考虑一个具有合作竞争交互作用的多智能体系统,系统包含n个跟随者智能体和r个领导者智能体,建立跟随者智能体i的模型为:
5、
6、建立领导者智能体l的模型为:
7、
8、其中,为智能体i的状态变量(i∈n∪r),为跟随者智能体i的控制输入(i∈n),和为常数矩阵,和分别为含时延和不含时延的非线性奇函数,时延d(t)满足且为常数;
9、(ⅱ)二分包容控制器设计
10、考虑该多智能体系统的二分包容控制器受到虚假数据注入脉冲攻击和马尔可夫拓扑切换的影响,设计此二分包容控制器ui(t)为:
11、
12、其中,
13、
14、其中,θ(t),t≥0为马尔可夫转换过程,νi∈{-1,1};多智能体之间的合作竞争拓扑关系可用符号图表示,εθ(t)为边的集合,为加权邻接矩阵,如果智能体i能接收到智能体j的信息,则令符号图的拉普拉斯矩阵为且假设每个领导者智能体之间没有连边,那么拉普拉斯矩阵也可表示为ζ1(θ(t))>0和ζ2(θ(t))>0为控制器增益,qi(t):为攻击函数,δ(·)为狄拉克脉冲,为攻击发生的脉冲时间序列,满足0=t0<t1<…<tk<…,且
15、跟随者智能体i的模型(1)可表示为:
16、
17、(ⅲ)多智能体误差系统建立
18、令θ=diag{ν1,…,νn},则
19、定义误差信号则智能体误差系统,表示如下:
20、
21、其中,为克罗内克积,误差系统初值为为连续函数:
22、
23、
24、
25、
26、(ⅳ)多智能体系统的二分包容一致性条件构建
27、如果给定正标量a1、a2、a3和σ,存在矩阵pp>0,p∈s,正标量∈1和∈2,使得下面的不等式成立:
28、
29、
30、
31、其中,且矩阵的特征值为rip,i∈n,re(rip)表示为特征值rip的实部,
32、那么,误差系统公式(6)的二分包容误差e(t)可收敛到均方意义上的有界集合其中则整个多智能体系统可以实现具有误差有界的二分包容同步。
33、进一步地,步骤(ⅰ)中所述的和分别为含时延和不含时延的非线性奇函数,是指对于任意的x,l=n+1,…,n+r,,非线性奇函数f(·)和fd(·)分别满足:
34、
35、
36、其中μ1>0、μ2>0为已知的常数,
37、进一步地,步骤(ⅱ)中所述的θ(t),t≥0为马尔可夫转换过程,是指转换过程θ(t)从有限集合中取值,且转换速率为,
38、
39、其中,δ>0,μpq≥0(p,q∈s,p≠q)表示从p转换到q的速率且相应的转换速率矩阵为y=[μpq]s×s。
40、进一步地,步骤(ⅱ)中所述的多智能体之间的合作竞争拓扑关系可用符号图表示,其中符号图包含一个由n个跟随者智能体构成的符号子图如果则跟随者智能体i和j之间存在合作关系;如果则跟随者智能体i和j之间存在竞争关系;如果则跟随者智能体i和j之间没有连边。
41、进一步地,步骤(ⅱ)中所述的qi(t):为攻击函数,是指qi(t)是有界的,存在一个正常数η,使得||q(·)||2≤η,其中
42、进一步地,上述的一个由n个跟随者智能体构成的符号子图其中符号子图是结构平衡的,且跟随者智能体集合n可以划分为两个子集n1和n2,满足n1∪n2=n,使得,当i,j∈n1或i,j∈n2时,当i∈na、j∈nb且a≠b,a,b∈{1,2}时,
43、进一步地,上述的符号子图是结构平衡的,是指对于任意θ(t)∈s,存在相同的二分子集{n1,n2},且在符号图中至少有一个领导者智能体,和每个跟随者智能体之间存在有向路径。
44、进一步地,上述的符号子图是结构平衡的,且跟随者智能体集合n可以划分为两个子集n1和n2,是指可使θ=diag{ν1,…,νn}中νi满足,当i∈n1时,νi=1;当i∈n2时,νi=-1。
45、有益效果:本发明研究一种多智能体系统的二分包容控制方法,考虑了具有虚假数据注入脉冲攻击和马尔可夫拓扑切换的共同影响;其次,利用lyapunov函数方法和线性矩阵不等式技术,构建了多智能体系统的二分包容一致性条件,仅需调整满足该条件就可实现具有误差有界的二分包容同步,实现方便。
技术特征:
1.一种多智能体系统的二分包容控制方法,其特征在于,包括如下几个步骤:
2.根据权利要求1所述的一种多智能体系统的二分包容控制方法,其特征在于:步骤(ⅰ)中所述的和分别为含时延和不含时延的非线性奇函数,是指对于任意的非线性奇函数f(·)和fd(·)分别满足:
3.根据权利要求1所述的一种多智能体系统的二分包容控制方法,其特征在于:步骤(ⅱ)中所述的θ(t),t≥0为马尔可夫转换过程,是指转换过程θ(t)从有限集合中取值,且转换速率为:
4.根据权利要求1所述的一种多智能体系统的二分包容控制方法,其特征在于:步骤(ⅱ)中所述的多智能体之间的合作竞争拓扑关系可用符号图表示,其中符号图包含一个由n个跟随者智能体构成的符号子图如果则跟随者智能体i和j之间存在合作关系;如果则跟随者智能体i和j之间存在竞争关系;如果则跟随者智能体i和j之间没有连边。
5.根据权利要求1所述的一种多智能体系统的二分包容控制方法,其特征在于:步骤(ⅱ)中所述的为攻击函数,是指qi(t)是有界的,存在一个正常数η,使得||q(·)||2≤η,其中
6.根据权利要求4所述的一种多智能体系统的二分包容控制方法,其特征在于:所述的一个由n个跟随者智能体构成的符号子图其中符号子图是结构平衡的,且跟随者智能体集合n可以划分为两个子集n1和n2,满足n1∪n2=n,使得,当i,j∈n1或i,j∈n2时,当i∈na、j∈nb且a≠b,a,b∈{1,2}时,
7.根据权利要求6所述的一种多智能体系统的二分包容控制方法,其特征在于:所述的符号子图是结构平衡的,是指对于任意θ(t)∈s,存在相同的二分子集{n1,n2},且在符号图中至少有一个领导者智能体,和每个跟随者智能体之间存在有向路径。
8.根据权利要求6所述的一种多智能体系统的二分包容控制方法,其特征在于:所述的符号子图是结构平衡的,且跟随者智能体集合n可以划分为两个子集n1和n2,是指可使θ=diag{ν1,…,νn}中νi满足,当i∈n1时,νi=1;当i∈n2时,νi=-1。
技术总结
本发明公开了一种多智能体系统的二分包容控制方法,包括如下步骤:考虑包含N个跟随者和R个领导者并具有合作竞争交互作用的多智能体系统,建立多智能体系统模型;然后设计多智能体系统的二分包容控制器,受到虚假数据注入脉冲攻击和马尔可夫拓扑切换的共同影响;再定义误差信号,得到克罗内克积形式的多智能体误差系统;构建多智能体系统的二分包容一致性条件,一旦调整满足二分包容一致性条件,就可实现具有误差有界的二分包容同步。本发明针对实际网络环境中可能会同时存在恶意的信息攻击、拓扑切换干扰,研究提出一种脉冲攻击和拓扑切换共同影响下多智能体系统的二分包容控制方法。
技术研发人员:吴新华
受保护的技术使用者:江苏工程职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!