承载有救援网的救援无人机智能控制方法及装置与流程
本发明涉及智能无人机,尤其涉及一种承载有救援网的救援无人机智能控制方法及装置。
背景技术:
1、救援,是人们在遭遇灾难或者突发事件时,获得实施解救行动的整个过程。对待救援人员进行及时以及可靠的救援行动,能够最大限度地减轻事故的后果,以保障待救援人员的生命财产安全。
2、当前,在进行与楼层建筑相关的救援行动时,救援人员常将充气气囊放置在楼层底下,以使得待救援人员跳至充气气囊时能够对其起到缓冲保护作用。然而,随着楼层建筑的高度增加,在高楼层的救援过程中,不仅充气气囊的缓冲保护作用会大大降低,并且待救援人员也难以精准地跳至充气气囊的保护范围内,从而使得待救援人员的人身安全受到伤害,不利于救援行动的有效实施。可见,提供一种新的救援方法以保障待救援人员的人身安全尤为重要。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种承载有救援网的救援无人机智能控制的方法及装置,能够有利于提高对无人机的控制可靠性及准确性,进而有利于提高对待救援对象的救援可靠性及有效性,降低救援冲击力,从而有利于保障待救援对象的人身安全。
2、为了解决上述技术问题,本发明第一方面公开了一种承载有救援网的救援无人机智能控制方法,所述方法包括:
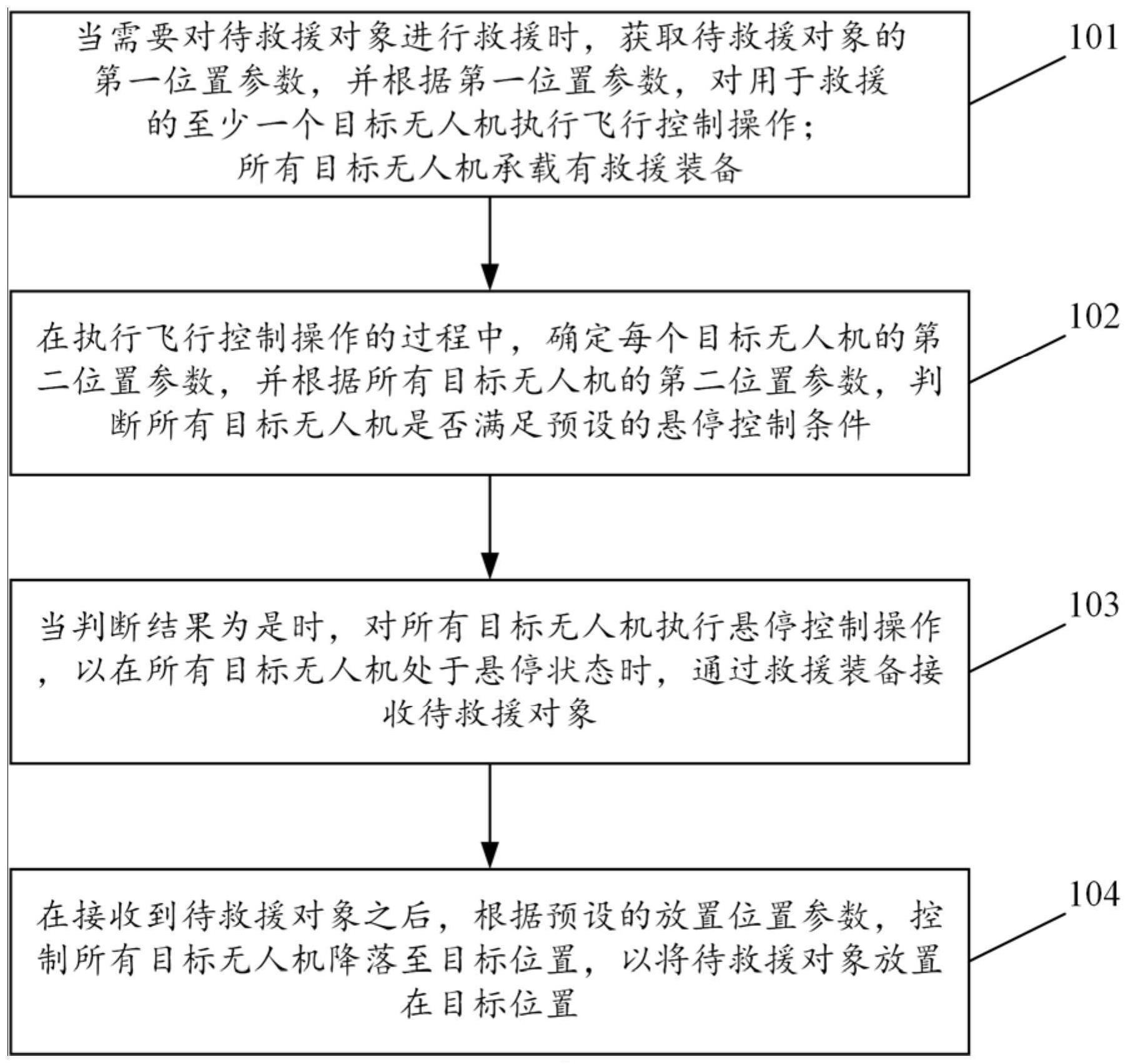
3、当需要对待救援对象进行救援时,获取所述待救援对象的第一位置参数,并根据所述第一位置参数,对用于救援的至少一个目标无人机执行飞行控制操作;所有所述目标无人机承载有救援装备;
4、在执行所述飞行控制操作的过程中,确定每个所述目标无人机的第二位置参数,并根据所有所述目标无人机的第二位置参数,判断所有所述目标无人机是否满足预设的悬停控制条件;
5、当判断结果为是时,对所有所述目标无人机执行悬停控制操作,以在所有所述目标无人机处于悬停状态时,通过所述救援装备接收所述待救援对象;
6、在接收到所述待救援对象之后,根据预设的放置位置参数,控制所有所述目标无人机降落至目标位置,以将所述待救援对象放置在所述目标位置。
7、作为一种可选的实施方式,在本发明第一方面中,所有所述目标无人机所承载的救援装备包括救援网;
8、以及,所述方法还包括:
9、在执行所述飞行控制操作的过程中,控制所有所述目标无人机对所述救援网执行拉开操作;
10、在对所述救援网执行拉开操作的过程中,获取所有所述目标无人机的飞行环境参数以及所述救援网的目标参数;所述飞行环境参数包括飞行环境障碍物类型、飞行环境障碍物运动情况以及飞行环境障碍物位置参数中的至少一种,所述救援网的目标参数包括所述救援网的网孔大小参数、网孔数量参数、网拉开面面积参数以及网拉开面与飞行环境障碍物之间的相对位置情况中的至少一种;
11、根据所有所述目标无人机的飞行环境参数以及所述救援网的目标参数,对所有所述目标无人机执行飞行避障操作。
12、作为一种可选的实施方式,在本发明第一方面中,所述根据所有所述目标无人机的第二位置参数,判断所有所述目标无人机是否满足预设的悬停控制条件,包括:
13、根据所有所述目标无人机的第二位置参数,确定所有所述目标无人机对所述救援网的网拉开面情况;所述网拉开面情况包括所述网拉开面面积参数、网拉开面倾斜度参数、网拉开面高度位置参数以及网拉开面水平位置参数;
14、根据所有所述目标无人机对所述救援网的网拉开情况,判断所述救援网对所述待救援对象是否满足预设的对象接收条件;
15、当判断出所述救援网对所述待救援对象满足所述对象接收条件时,确定所有所述目标无人机满足预设的悬停控制条件。
16、作为一种可选的实施方式,在本发明第一方面中,所述根据所有所述目标无人机对所述救援网的网拉开情况,判断所述救援网对所述待救援对象是否满足预设的对象接收条件,包括:
17、根据所述网拉开面面积参数以及所述网拉开面倾斜度参数,判断所述救援网的网拉开面是否满足预设的拉开面接收条件;所述拉开面接收条件包括拉开面面积参数阈值条件以及拉开面倾斜度参数阈值条件;
18、当判断出所述网拉开面满足所述拉开面接收条件时,确定所述待救援对象的救援环境参数,并根据所述救援环境参数,判断所述待救援对象是否处于预设的突出建筑物位置;
19、当判断出所述待救援对象不处于所述突出建筑物位置时,根据所述网拉开面高度位置参数、所述网拉开面水平位置参数以及所述第一位置参数,确定所述待救援对象与所述救援网的第一接收位置之间的第一距离参数;所述第一距离参数包括第一水平距离参数和/或第一垂直距离参数;
20、判断所述第一距离参数是否小于等于预设的第一距离参数阈值;
21、当判断出所述第一距离参数小于等于所述第一距离参数阈值时,确定所述救援网对所述待救援对象满足预设的对象接收条件。
22、作为一种可选的实施方式,在本发明第一方面中,所述方法还包括:
23、当判断出所述待救援对象处于所述突出建筑物位置时,确定所述待救援对象所处的突出建筑物的底部突出边缘位置参数;
24、根据所述网拉开面高度位置参数、所述网拉开面水平位置参数以及所述底部突出边缘位置参数,确定所述突出建筑物的底部突出边缘位置与所述救援网针对所述待救援对象的第二接收位置之间的第二距离参数;所述第二距离参数包括第二水平距离参数和/或第二垂直距离参数;
25、判断所述第二距离参数是否小于等于预设的第二距离参数阈值;
26、当判断出所述第二距离参数小于等于所述第二距离参数阈值时,确定所述救援网对所述待救援对象满足预设的对象接收条件。
27、作为一种可选的实施方式,在本发明第一方面中,在所述根据所述第一位置参数,对用于救援的至少一个目标无人机执行飞行控制操作之前,所述方法还包括:
28、确定用于组网的所有目标无人机对应的组网参数,并根据所有所述目标无人机对应的组网参数,对预承载的救援网进行组网操作;
29、其中,所述确定用于组网的所有目标无人机对应的组网参数,并根据所有所述目标无人机对应的组网参数,对预承载的救援网进行组网操作,包括:
30、获取所述待救援对象的重量参数,并根据所述重量参数以及预设的第一无人机承重参数,确定用于组网的所有第一无人机的数量参数;所有所述第一无人机为需要具备承重功能的无人机;
31、根据所有所述第一无人机的数量参数以及预承载的救援网的网尺寸参数,确定每两个所述第一无人机之间的组网间隔距离参数,并判断所述组网间隔距离参数是否大于等于预设的间隔距离参数阈值;
32、当判断结果为否时,根据每两个所述第一无人机之间的组网间隔距离参数,对预承载的救援网进行组网操作;
33、当判断结果为是时,根据所述组网间隔距离参数、预设的第一无人机旋转范围参数以及第二无人机旋转范围参数,确定用于组网的所有第二无人机对应的组网需求参数;所有所述第二无人机为不需要具备承重功能的无人机,所述组网需求参数包括组网需求数量参数以及组网需求间隔参数;
34、根据每两个所述第一无人机之间的组网间隔距离参数以及所有所述第二无人机对应的组网需求参数,对预承载的救援网进行组网操作。
35、作为一种可选的实施方式,在本发明第一方面中,在判断出所述救援网对所述待救援对象满足所述对象接收条件之后,所述确定所有所述目标无人机满足预设的悬停控制条件之前,所述方法还包括:
36、确定每个所述目标无人机的预悬停环境参数;每个所述目标无人机的预悬停环境参数包括该目标无人机的预悬停位置与预设的建筑物的建筑面之间的悬停距离参数和/或所述建筑面的物件构造情况;
37、根据每个所述目标无人机的预悬停环境参数以及每个目标无人机的旋转范围,预测每个所述目标无人机对应的预悬停危险指数,并判断所有所述目标无人机对应的预悬停危险指数是否均小于等于预设的危险指数阈值;
38、当判断出所有所述目标无人机对应的预悬停危险指数均小于等于所述危险指数阈值时,确定所有所述目标无人机满足预设的悬停控制条件。
39、本发明第二方面公开了一种承载有救援网的救援无人机智能控制装置,所述装置包括:
40、获取模块,用于当需要对待救援对象进行救援时,获取所述待救援对象的第一位置参数;
41、控制模块,用于根据所述第一位置参数,对用于救援的至少一个目标无人机执行飞行控制操作;所有所述目标无人机承载有救援装备;
42、确定模块,用于在所述控制模块执行所述飞行控制操作的过程中,确定每个所述目标无人机的第二位置参数;
43、判断模块,用于根据所有所述目标无人机的第二位置参数,判断所有所述目标无人机是否满足预设的悬停控制条件;
44、所述控制模块,还用于当所述判断模块判断结果为是时,对所有所述目标无人机执行悬停控制操作,以在所有所述目标无人机处于悬停状态时,通过所述救援装备接收所述待救援对象;在接收到所述待救援对象之后,根据预设的放置位置参数,控制所有所述目标无人机降落至目标位置,以将所述待救援对象放置在所述目标位置。
45、作为一种可选的实施方式,在本发明第二方面中,所有所述目标无人机所承载的救援装备包括救援网;
46、以及,所述控制模块,还用于:
47、在执行所述飞行控制操作的过程中,控制所有所述目标无人机对所述救援网执行拉开操作;
48、所述获取模块,还用于在所述控制模块对所述救援网执行拉开操作的过程中,获取所有所述目标无人机的飞行环境参数以及所述救援网的目标参数;所述飞行环境参数包括飞行环境障碍物类型、飞行环境障碍物运动情况以及飞行环境障碍物位置参数中的至少一种,所述救援网的目标参数包括所述救援网的网孔大小参数、网孔数量参数、网拉开面面积参数以及网拉开面与飞行环境障碍物之间的相对位置情况中的至少一种;
49、所述控制模块,还用于根据所有所述目标无人机的飞行环境参数以及所述救援网的目标参数,对所有所述目标无人机执行飞行避障操作。
50、作为一种可选的实施方式,在本发明第二方面中,所述判断模块,包括:
51、确定子模块,用于根据所有所述目标无人机的第二位置参数,确定所有所述目标无人机对所述救援网的网拉开面情况;所述网拉开面情况包括所述网拉开面面积参数、网拉开面倾斜度参数、网拉开面高度位置参数以及网拉开面水平位置参数;
52、判断子模块,用于根据所有所述目标无人机对所述救援网的网拉开情况,判断所述救援网对所述待救援对象是否满足预设的对象接收条件;
53、所述确定子模块,还用于当所述判断模块判断出所述救援网对所述待救援对象满足所述对象接收条件时,确定所有所述目标无人机满足预设的悬停控制条件。
54、作为一种可选的实施方式,在本发明第二方面中,所述判断子模块根据所有所述目标无人机对所述救援网的网拉开情况,判断所述救援网对所述待救援对象是否满足预设的对象接收条件的方式具体包括:
55、根据所述网拉开面面积参数以及所述网拉开面倾斜度参数,判断所述救援网的网拉开面是否满足预设的拉开面接收条件;所述拉开面接收条件包括拉开面面积参数阈值条件以及拉开面倾斜度参数阈值条件;
56、当判断出所述网拉开面满足所述拉开面接收条件时,确定所述待救援对象的救援环境参数,并根据所述救援环境参数,判断所述待救援对象是否处于预设的突出建筑物位置;
57、当判断出所述待救援对象不处于所述突出建筑物位置时,根据所述网拉开面高度位置参数、所述网拉开面水平位置参数以及所述第一位置参数,确定所述待救援对象与所述救援网的第一接收位置之间的第一距离参数;所述第一距离参数包括第一水平距离参数和/或第一垂直距离参数;
58、判断所述第一距离参数是否小于等于预设的第一距离参数阈值;
59、当判断出所述第一距离参数小于等于所述第一距离参数阈值时,确定所述救援网对所述待救援对象满足预设的对象接收条件。
60、作为一种可选的实施方式,在本发明第二方面中,所述判断子模块根据所有所述目标无人机对所述救援网的网拉开情况,判断所述救援网对所述待救援对象是否满足预设的对象接收条件的方式具体还包括:
61、当判断出所述待救援对象处于所述突出建筑物位置时,确定所述待救援对象所处的突出建筑物的底部突出边缘位置参数;
62、根据所述网拉开面高度位置参数、所述网拉开面水平位置参数以及所述底部突出边缘位置参数,确定所述突出建筑物的底部突出边缘位置与所述救援网针对所述待救援对象的第二接收位置之间的第二距离参数;所述第二距离参数包括第二水平距离参数和/或第二垂直距离参数;
63、判断所述第二距离参数是否小于等于预设的第二距离参数阈值;
64、当判断出所述第二距离参数小于等于所述第二距离参数阈值时,确定所述救援网对所述待救援对象满足预设的对象接收条件。
65、作为一种可选的实施方式,在本发明第二方面中,所述装置还包括:
66、组网模块,用于在所述控制模块根据所述第一位置参数,对用于救援的至少一个目标无人机执行飞行控制操作之前,确定用于组网的所有目标无人机对应的组网参数,并根据所有所述目标无人机对应的组网参数,对预承载的救援网进行组网操作;
67、其中,所述组网模块确定用于组网的所有目标无人机对应的组网参数,并根据所有所述目标无人机对应的组网参数,对预承载的救援网进行组网操作的方式具体为:
68、获取所述待救援对象的重量参数,并根据所述重量参数以及预设的第一无人机承重参数,确定用于组网的所有第一无人机的数量参数;所有所述第一无人机为需要具备承重功能的无人机;
69、根据所有所述第一无人机的数量参数以及预承载的救援网的网尺寸参数,确定每两个所述第一无人机之间的组网间隔距离参数,并判断所述组网间隔距离参数是否大于等于预设的间隔距离参数阈值;
70、当判断结果为否时,根据每两个所述第一无人机之间的组网间隔距离参数,对预承载的救援网进行组网操作;
71、当判断结果为是时,根据所述组网间隔距离参数、预设的第一无人机旋转范围参数以及第二无人机旋转范围参数,确定用于组网的所有第二无人机对应的组网需求参数;所有所述第二无人机为不需要具备承重功能的无人机,所述组网需求参数包括组网需求数量参数以及组网需求间隔参数;
72、根据每两个所述第一无人机之间的组网间隔距离参数以及所有所述第二无人机对应的组网需求参数,对预承载的救援网进行组网操作。
73、作为一种可选的实施方式,在本发明第二方面中,所述确定子模块,还用于:
74、在所述判断子模块判断出所述救援网对所述待救援对象满足所述对象接收条件之后,所述确定所有所述目标无人机满足预设的悬停控制条件之前,确定每个所述目标无人机的预悬停环境参数;每个所述目标无人机的预悬停环境参数包括该目标无人机的预悬停位置与预设的建筑物的建筑面之间的悬停距离参数和/或所述建筑面的物件构造情况;
75、以及,所述判断模块还包括:
76、预测子模块,用于根据每个所述目标无人机的预悬停环境参数以及每个目标无人机的旋转范围,预测每个所述目标无人机对应的预悬停危险指数;
77、所述判断子模块,还用于判断所有所述目标无人机对应的预悬停危险指数是否均小于等于预设的危险指数阈值;
78、所述确定子模块,还用于当所述判断子模块判断出所有所述目标无人机对应的预悬停危险指数均小于等于所述危险指数阈值时,确定所有所述目标无人机满足预设的悬停控制条件。
79、本发明第三方面公开了另一种承载有救援网的救援无人机智能控制装置,所述装置包括:
80、存储有可执行程序代码的存储器;
81、与所述存储器耦合的处理器;
82、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明第一方面公开的承载有救援网的救援无人机智能控制方法。
83、本发明第四方面公开了一种计算机存储介质,所述计算机存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明第一方面公开的承载有救援网的救援无人机智能控制方法。
84、与现有技术相比,本发明实施例具有以下有益效果:
85、本发明实施例中,当需要对待救援对象进行救援时,获取其第一位置参数,并根据第一位置参数,对承载有救援网的目标无人机进行飞行控制;在进行飞行控制的过程中,确定每个目标无人机的第二位置参数,并以此判断所有目标无人机是否满足预设的悬停控制条件,若是,则对所有目标无人机进行悬停控制,以通过所承载的救援网接收待救援对象,并控制所有目标无人机降落以将救援对象放置在目标位置。可见,实施本发明能够通过无人机的自动控制近距离地利用救援装备对待救援对象进行救援,有利于提高对承载有救援网的无人机的控制可靠性及准确性,进而有利于提高对待救援对象的救援可靠性及有效性,降低救援冲击力,从而有利于保障待救援对象的人身安全;同时,也有利于提升对待救援对象的救援效率,从而有利于及时地对待救援对象进行救援,以保证救援工作的顺利进行。
- 还没有人留言评论。精彩留言会获得点赞!