一种发动机矢量推力失效下的飞行重构与容错控制系统及方法
本发明属于飞行控制领域,尤其是一种发动机矢量推力失效下的飞行重构与容错控制系统及方法。
背景技术:
1、为满足战争需要,新一代战斗机不仅需要具备高空高速性能,也需要具备机动、敏捷和隐身性能。为了提升战斗机的常规机动性、过失速机动性、敏捷性短距起落、隐身等性能,研发新一代战机时,在发动机上大量使用了矢量推力技术。高复杂的传感部件及作动部件一旦发生故障,将导致重大损失。
2、目前,对发动机矢量推力失效下的飞行重构与容错控制研究不足,现有方法在实时性、准确性和鲁棒性等方面存在缺陷。
技术实现思路
1、本发明的目的在于克服上述现有技术的缺点,提供一种发动机矢量推力失效下的飞行重构与容错控制系统及方法。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、一种发动机矢量推力失效下的飞行重构与容错控制方法,包括以下步骤:
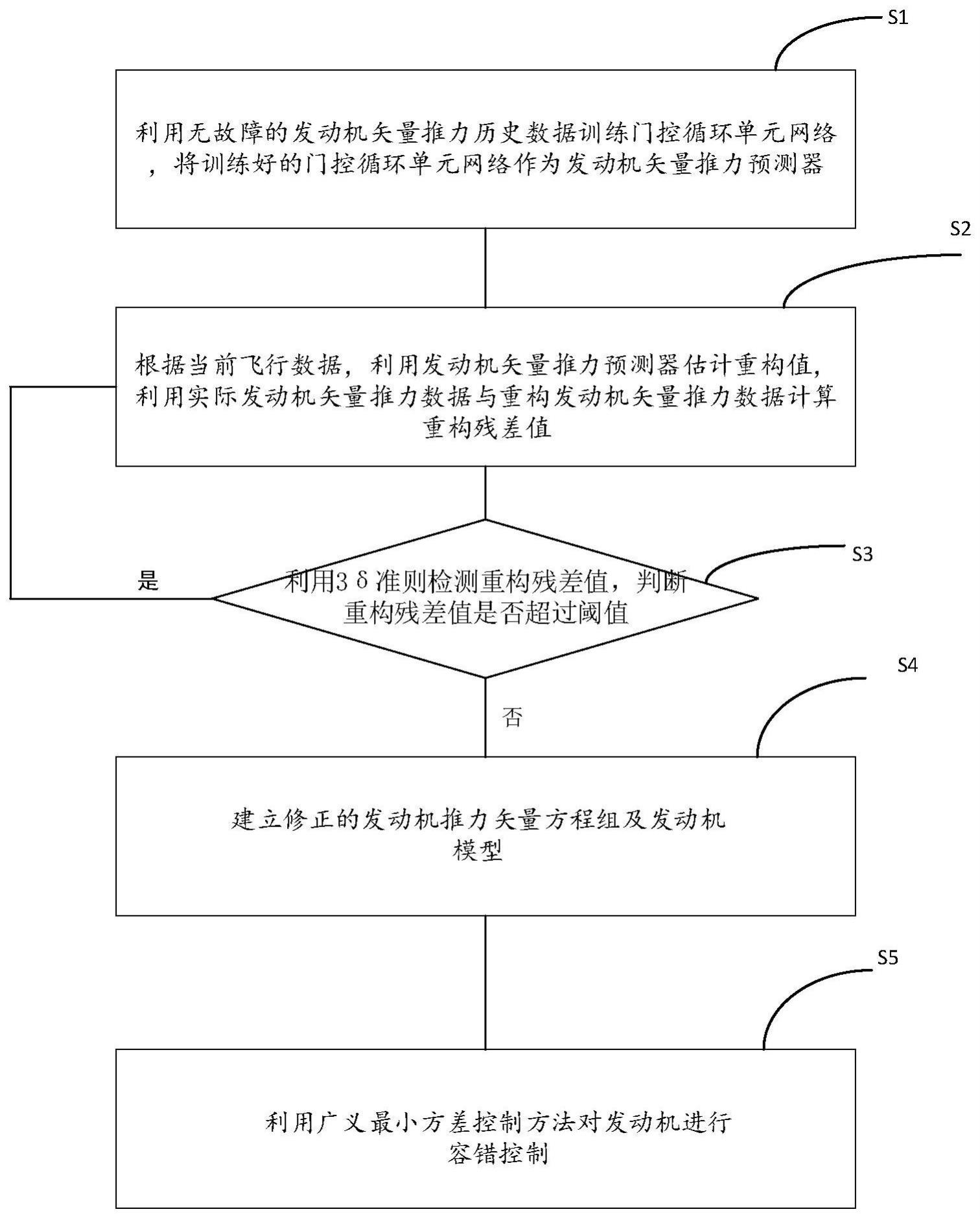
4、步骤1、利用无故障的发动机矢量推力历史数据训练门控循环单元网络,将训练好的门控循环单元网络作为发动机矢量推力预测器;
5、步骤2、根据当前飞行数据,利用发动机矢量推力预测器估计重构值,利用实际发动机矢量推力数据与重构发动机矢量推力数据计算重构残差值;
6、步骤3、利用3σ准则构建阈值生成器检测重构残差值;
7、若重构残差值超过阈值,则判定发动机矢量推力已经失效,此时转到步骤4,否则返回步骤(2);
8、步骤4、建立修正的发动机推力矢量方程组及发动机模型;
9、步骤5、利用广义最小方差控制方法对发动机进行容错控制。
10、进一步的,步骤4中建立修正的发动机推力矢量方程组及发动机模型为:
11、修正的发动机推力矢量方程组如式(12)所示:
12、
13、其中,t代表发动机推力大小,tx、ty、tz分别代表沿机体坐标轴三轴的推力分量,αt为发动机推力矢量喷管沿飞机俯仰方向偏角;βt为发动机推力矢量喷管沿飞机偏航方向偏角,为修正后的舵机俯仰偏转控制信号,为修正后的舵机偏航偏转控制信号;
14、采用wiener模型对发动机本体建立的离散模型表示如式(15)所示:
15、
16、其中,y(k)为k时刻的发动机输出,u(k)为k时刻的发动机油门,u(k-d)为k-d时刻的发动机油门,ξ(k)为k时刻的独立的随机噪声,d为被控对象时延,且d≥1,z-i为后移算子,a(z-1)、b(z-1)及c(z-1)为hurwitz多项式,ai、bi、ci为对应多项式系数。
17、进一步的,根据发动机不同转速区间,a(z-1)、b(z-1)和c(z-1)中系数取值不同。
18、进一步的,步骤5中利用广义最小方差控制方法对发动机进行容错控制,具体为:
19、构建目标函数如式(16)所示:
20、j=e{[p(z-1)y(k+d)-r(z-1)yd(k)+q(z-1)u(k)]2} (16)
21、其中,y(k+d)为(k+d)时刻的发动机输出,yd(k)为k时刻参考输入的加权多项式,p(z-1)为实际输出加权多项式,r(z-1)为参考输入加权多项式,q(z-1)为控制输入加权多项式;
22、令目标函数达到最小的控制量u(k)如式(17)所示:
23、
24、其中,l=f(z-1)b(z-1)+c(z-1)q(z-1),m=c(z-1)r(z-1),n=g(z-1),f(z-1)与g(z-1)为diophantine方程的过渡加权多项式。
25、进一步的,步骤1中所述门控循环单元网络由循环神经网络和门控单元构成,所述门控循环单元后设置有由单个神经元与mish激活函数组成的回归层。
26、进一步的,步骤3中利用3σ准则构建阈值具体为:
27、
28、其中,m与s分别为发动机矢量推力重构残差的均值与方差。
29、一种发动机矢量推力失效下的飞行重构与容错控制系统,包括故障检测模块和容错控制模块;
30、所述故障检测模块,用于估计发动机矢量推力预测值,比较实际发动机矢量推力和估计发动机矢量推力,判断发动机矢量推力是否存在故障;
31、所述容错控制模块,用于在发动机矢量推力失效时,建立修正发动机推力矢量方程组及发动机模型,利用广义最小方差控制方法实现对发动机的容错控制。
32、进一步的,所述故障检测模块包括发动机矢量推力预测器、发动机矢量推力重构残差计算器、发动机矢量推力阈值生成器和发动机矢量推力故障检测器;
33、发动机矢量推力预测器,用于基于无故障的发动机矢量推力历史数据训练门控循环单元网络,重构发动机矢量推力;
34、所述发动机矢量推力重构残差计算器,用于基于实际发动机矢量推力数据与估计发动机矢量推力数据计算重构残差值;
35、所述发动机矢量推力阈值生成器,用于通过3σ准则计算非负故障阈值;
36、所述发动机矢量推力故障检测器,用于将所述重构残差与所述故障阈值进行比较,判断重构残差是否超过阈值,若超过阈值,则判定发动机矢量推力出现失效;否则,发动机矢量推力为正常状况。
37、进一步的,所述容错控制模块包括相关发动机模型生成器和广义最小方差控制器;
38、所述相关发动机模型生成器,用于对推力矢量系统的机理模型进行修正,生成修正的发动机推力矢量方程组及发动机模型;
39、所述广义最小方差控制器,用于利用广义最小方差控制方法对发动机进行容错控制。
40、基于修正的发动机推力矢量方程组及发动机模型获取的相应任务信号作为广义最小方差控制器的输入,利用广义最小方差控制方法获取相应的控制输出信号。
41、与现有技术相比,本发明具有以下有益效果:
42、一种发动机矢量推力失效下的飞行重构与容错控制方法,该方法在发动机矢量推力历史数据的基础上,进行故障检测,通过飞机的实际发动机矢量推力和估计发动机矢量推力进行比较计算以判断飞机是否存在故障,这种检测方法具有较强的鲁棒性,当系统出现早期微小故障时,可以更精准高效的检测出舵面故障,通过修正后的发动机推力矢量方程组及发动机模型,利用广义最小方差控制方法实现对发动机的容错控制,能够对已知动力学特性的发动机矢量推力进行直接控制,实现对飞机发动机矢量推力的故障诊断与容错控制。而及时精准的检测出发动机矢量推力异常,并利用飞机上关于这些发动机的冗余设计进行容错控制,则可以在尽可能保证飞行性能的前提下继续飞行任务或实现安全着陆,能够最大限度的降低事故所造成的损失,提高飞机的安全性。
43、区别于现有的容错飞行控制装置,本发明提出的发动机矢量推力失效下的飞行重构与容错控制系统,本发明的系统由故障诊断模块与容错控制模块组成。故障诊断模块包括基于门控循环单元网络的发动机矢量推力预测器、发动机矢量推力重构残差计算器、基于3σ准则的发动机矢量推力阈值生成器和发动机矢量推力故障检测器。故障诊断模块主要基于修正的发动机推力矢量方程组与发动机模型,以及广义最小方差控制器。首先利用无故障的发动机矢量推力历史数据构建基于门控循环单元网络的发动机矢量推力预测器,然后在发动机矢量推力预测器的基础上设计重构残差计算器、阈值生成器和故障检测器。其次,基于修正的发动机推力矢量方程组与发动机模型,利用广义最小方差控制器实现容错控制。发动机矢量推力预测器可以对推理失效进行观测和重构,还能对发动机的外部干扰信号继续观测估计。广义最小方差控制器可以输出飞机发动机的推力控制信号,经发动机原有控制分配部件完成在推力部分失效状态下的控制,保证飞机平稳安全飞行。本发明不仅能够对飞机发动机本身的故障进行预测和估计,还可以对飞机外部干扰信号进行估计,进而进行容错控制,提高飞机位置及姿态控制的容错性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!