一种自动驾驶清扫车盘刷智能控制系统及方法与流程
本发明涉及无人清扫车,尤其是涉及一种自动驾驶清扫车盘刷智能控制系统及方法。
背景技术:
1、目前景区和大型工厂的移动式清扫作业主要由无人驾驶小型盘刷式清扫车完成。现有cn113589814a基于路况识别压力、位置自动调节的盘刷系统,包括检测平台、计算平台、清扫车底盘和控制系统。通过盘刷安装平台的位置调节液压缸和液压马达联动实现盘刷的提升和下落。
2、一种自动驾驶盘刷式清扫车的盘刷下压高度的控制装置,包括检测平台、计算平台、清扫车底盘和控制系统;能够根据目标检测平台识别不同的路面附着系数和垃圾层次等级,利用伺服电机泵控系统改变伺服电机的转矩实时的对盘刷的接地压力进行自动调节,并利用保压特性实现清扫车盘刷在规定阶段内自适应调节工作;同时可以通过识别检测盘刷与路沿石之间的距离,通过位移调节系统实现盘刷刷毛贴路沿清扫作业;此外,可以识别路面垃圾集中度范围,根据不同的位置信息通过位移调节系统实现盘刷系统在垂直于前进路线的方向进行位置改变,以及根据路边障碍物位置信息实现路边障碍物的自动避让。但是存以下问题与不足:控制装置无法主动识别路面起伏纹理状态,控制装置无法主动提升盘刷高度,液压电机转速不可主动控制,盘刷与地面相对高度无法主动反馈,液压马达及液压油缸共油路,有漏液风险。
技术实现思路
1、鉴于以上问题或不足,本发明提供了一种自动驾驶清扫车盘刷智能控制系统及方法,不仅达到盘刷智能控制并提升垃圾清扫效果的目的,简化了运营区域清扫保洁流程,而且能够适应复杂地纹变化和垃圾堆积情况,提高垃圾清扫效果,节省能耗,减少人工费用。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:一种自动驾驶清扫车盘刷智能控制系统,所述系统包括:
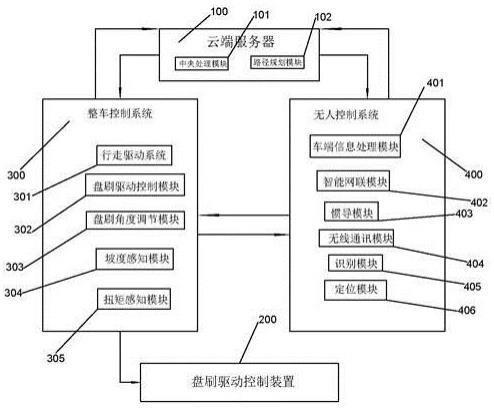
3、云端服务器,所述云端服务器包括中央处理模块和路径规划模块,用于处理车辆传输的数据信息和下发车辆控制数据信息;
4、盘刷驱动控制装置,所述盘刷驱动控制装置包括盘刷角度控制电机、盘刷驱动电机和盘刷提升电机,所述盘刷提升电机通过提升链条与摆臂连接,所述摆臂的一侧设有所述盘刷角度控制电机,所述盘刷角度控制电机的第一驱动轴与第一盘刷连接法兰连接,所述第一盘刷连接法兰通过连接座与盘刷连接,所述连接座的上方设有盘刷驱动电机,所述盘刷驱动电机的第二驱动轴与第二盘刷连接法兰连接,所述第二盘刷连接法兰与所述盘刷连接;
5、整车控制系统,所述整车控制系统包括行走驱动系统、盘刷驱动控制模块、盘刷角度调节模块、坡度感知模块和扭矩感知模块,用于接收车辆控制数据信息和调节车辆盘刷;
6、无人控制系统,与所述云端服务器连接,用于传输车辆的数据信息和道路的环境数据信息。
7、进一步的,所述无人控制系统包括车端信息处理模块、智能网联模块、惯导模块、无线通讯模块、识别模块和定位模块。
8、进一步的,所述识别模块用于识别道路图像数据信息并进行分类,输出垃圾数量信息和道路路面地纹信息,所述定位模块用于获取车辆的实时位置数据信息和垃圾的位置数据信息,所述惯导模块用于实时获取车辆速度信息和加速度信息。
9、进一步的,所述识别模块、所述定位模块、所述惯导模块分别与所述车端信息处理模块连接,所述车端信息处理模块与所述无线通讯模块连接,所述车端信息处理模块与所述智能网联模块连接。
10、进一步的,所述盘刷驱动控制装置与所述整车控制系统连接,所述整车控制系统与所述无人控制系统连接。
11、进一步的,所述路径规划模块根据高精度地图和垃圾位置信息对车辆进行最优路径规划。
12、进一步的,所述盘刷角度调节模块、所述坡度感知模块、所述扭矩感知模块分别与所述盘刷驱动控制模块连接。
13、为了实现上述目的及其他相关目的,本发明还提供了一种自动驾驶清扫车盘刷智能控制方法,所述方法包括:
14、t1.基于无人清扫车内置的识别模块和坡度感知模块,会对清扫的路面地纹、坡度和垃圾堆积情况进行识别,并进行特征提取,输出道路特征数据信息;
15、t2.基于所述道路特征数据信息,根据盘刷驱动控制模块,调整盘刷与路面的高度,根据盘刷的角度调节模块和扭矩感知模块,调节盘刷的角度。
16、t3.基于所述盘刷与路面的高度和所述盘刷的角度,根据车辆实时的位置信息,驱动无人清扫车完成清扫任务。
17、进一步的,所述道路特征数据信息包括路面纹路特征数据信息、坡度值信息和垃圾数量信息。
18、进一步的,所述盘刷的角度根据所述盘刷与路面的高度实时进行调节。
19、本发明具有以下积极效果:
20、1.本发明实现了指定运营区域范围内清扫区域自动规划、清扫路径自动规划、路面地纹和垃圾堆放智能检测以及盘刷高度、转速和离地相对夹角主动控制,达到盘刷智能控制并提升垃圾清扫效果的目的,简化了运营区域清扫保洁流程。
21、2.本发明通过对控制器、激光雷达、摄像头、用电接口、盘刷系统和垃圾箱的模块化设计以及标准化设计,实现了实现了无人清扫车多功能化、盘刷机构易损零部件的通用化和互换化,保证系统能够规模化、产业化。
22、3.本发明通过智能云端对指定运营区域的智能区域划分,无人清扫车逐一巡逻和采集地面数据并上传,云端路径规划后调度无人清扫车组针对不同工况路面进行垃圾处理和回收,保证智能云端能实时监控各划分区域的环境卫生情况,并智能调节盘刷高度、转速和离地相对角度,以适应复杂地纹变化和垃圾堆积情况,提高垃圾清扫效果,节省能耗,减少人工费用,美化办公及生活环境。
技术特征:
1.一种自动驾驶清扫车盘刷智能控制系统,其特征在于,所述系统包括:
2.根据权利要求1所述的自动驾驶清扫车盘刷智能控制系统,其特征在于:所述无人控制系统(400)包括车端信息处理模块(401)、智能网联模块(402)、惯导模块(403)、无线通讯模块(404)、识别模块(405)和定位模块(406)。
3.根据权利要求2所述的自动驾驶清扫车盘刷智能控制系统,其特征在于:所述识别模块(406)用于识别道路图像数据信息并进行分类,输出垃圾数量信息和道路路面地纹信息,所述定位模块(406)用于获取车辆的实时位置数据信息和垃圾的位置数据信息,所述惯导模块(403)用于实时获取车辆速度信息和加速度信息。
4.根据权利要求2所述的自动驾驶清扫车盘刷智能控制系统,其特征在于:所述识别模块(405)、所述定位模块(406)、所述惯导模块(403)分别与所述车端信息处理模块(401)连接,所述车端信息处理模块(401)与所述无线通讯模块(404)连接,所述车端信息处理模块(401)与所述智能网联模块(402)连接。
5.根据权利要求1所述的自动驾驶清扫车盘刷智能控制系统,其特征在于:所述盘刷驱动控制装置(200)与所述整车控制系统(300)连接,所述整车控制系统(300)与所述无人控制系统(400)连接。
6.根据权利要求1所述的自动驾驶清扫车盘刷智能控制系统,其特征在于:所述路径规划模块(102)根据高精度地图和垃圾位置信息对车辆进行最优路径规划。
7.根据权利要求1所述的自动驾驶清扫车盘刷智能控制系统,其特征在于:所述盘刷角度调节模块(303)、所述坡度感知模块(304)、所述扭矩感知模块(305)分别与所述盘刷驱动控制模块(302)连接。
8.一种自动驾驶清扫车盘刷智能控制方法,其特征在于,所述方法包括:
9.根据权利要求8所述的自动驾驶清扫车盘刷智能控制方法,其特征在于:所述道路特征数据信息包括路面纹路特征数据信息、坡度值信息和垃圾数量信息。
10.根据权利要求8所述的自动驾驶清扫车盘刷智能控制方法,其特征在于:所述盘刷的角度根据所述盘刷与路面的高度实时进行调节。
技术总结
本发明涉及一种自动驾驶清扫车盘刷智能控制系统及方法,所述系统包括云端服务器,所述云端服务器包括中央处理模块和路径规划模块,用于处理车辆传输的数据信息和下发车辆控制数据信息;盘刷驱动控制装置,所述盘刷驱动控制装置包括盘刷角度控制电机、盘刷驱动电机和盘刷提升电机,所述盘刷提升电机通过提升链条与摆臂连接,所述摆臂的一侧设有所述盘刷角度控制电机,所述盘刷角度控制电机的驱动轴与第一盘刷连接法兰连接。本发明不仅达到盘刷智能控制并提升垃圾清扫效果的目的,简化了运营区域清扫保洁流程,而且能够适应复杂地纹变化和垃圾堆积情况,提高垃圾清扫效果,节省能耗,减少人工费用。
技术研发人员:周尚谕,苗蕾,王甜,邓创新,马雷霆,王伦,郑兆刚
受保护的技术使用者:东风悦享科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!