一种间接共享控制的船舶驾驶系统和方法
本发明涉及船舶航行,尤其涉及种间接共享控制的船舶驾驶系统和一种间接共享控制的船舶驾驶方法。
背景技术:
1、近年来随着电子技术、信息技术和网络技术的飞速发展,船舶已经逐渐开始由传统的机电控制向网络化、数字化和自动化控制转变,内河水面自主船舶随之兴起,内河水面自主船舶的特点之一就是可以实现远程驾控功能,远程驾控是指船舶能够被远程控制站控制,实现部分自主运行、降低人工值守压力。该技术可以降低对船员的依赖,也是近年来国内外竞相投入的研究方向。
2、远程驾驶系统通过岸基控制中心对船舶进行远程控制,实现船舶的远程航行。操作者可以观察船舶周围的情况,船上船员在应急情况或必要时可以接管船舶的操作。但在,由于水面自主船舶的远程控制多应用于航行在港区、通航密集的航道、分道通航等特殊区域,船舶在操纵过程中需要频繁进行转向、保向、保速、加减速操作,船舶在通信时延等问题的影响下,航行稳定性将极度不可控。而且,如果遇到危险情况,岸基控制中心移交驾驶权至驾驶人的过程中,驾驶人由非驾驶任务状态接管船舶时,由于认知和操作能力不足往往会引发一系列安全问题。
技术实现思路
1、有鉴于此,有必要提供一种间接共享控制的船舶驾驶系统和一种间接共享控制的船舶驾驶方法,降低由于通信时延和丢包问题造成的船舶碰撞风险,并解决当驾驶权由岸基控制中心移交到驾驶人时,驾驶人由于认知和操作能力不足,容易发送安全事故的技术问题。
2、为了解决上述问题,本发明提供一种间接共享控制的船舶驾驶系统,所述系统包括环境感知模块、航行风险量评估模块、路径规划模块、控制权切换模块和控制执行模块;
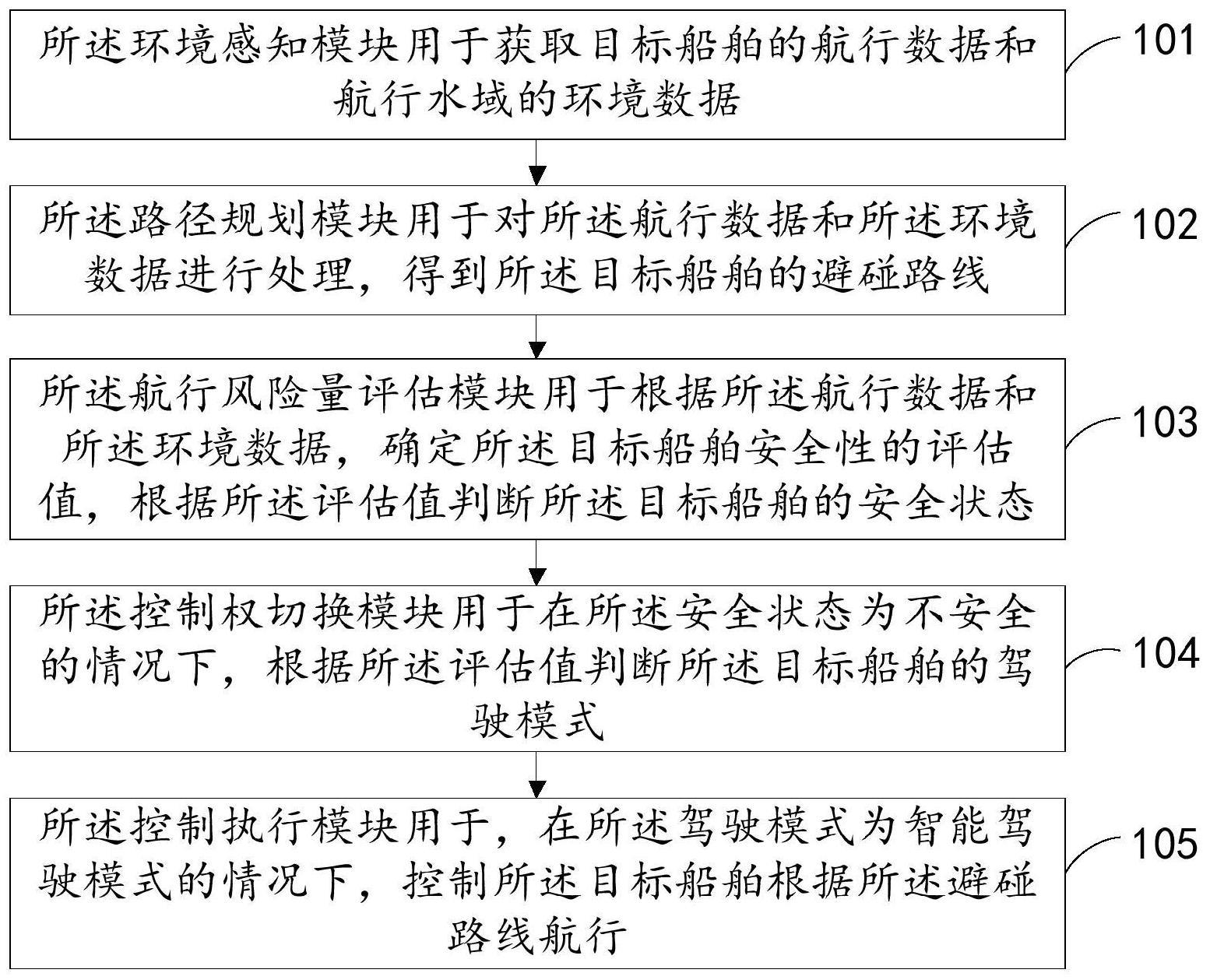
3、所述环境感知模块用于获取目标船舶的航行数据和航行水域的环境数据;
4、所述路径规划模块用于对所述航行数据和所述环境数据进行处理,得到所述目标船舶的避碰路线;
5、所述航行风险量评估模块用于根据所述航行数据和所述环境数据,确定所述目标船舶安全性的评估值,并根据所述评估值判断所述目标船舶的安全状态;
6、所述控制权切换模块用于在所述安全状态为不安全的情况下,根据所述评估值判断所述目标船舶的驾驶模式;
7、所述控制执行模块用于在所述驾驶模式为智能航行模式的情况下,控制所述目标船舶根据所述避碰路线航行。
8、进一步的,所述系统还包括通信模块,所述通信模块与岸基控制中心通信连接,所述通信模块包括信息发送装置;
9、所述通信模块用于通过所述信息发送装置将所述环境感知模块、所述航行风险量评估模块和所述控制执行模块的数据发送至所述岸基控制中心,以使所述岸基控制中心根据所述数据发送第一控制指令。
10、进一步的,所述通信模块还包括信息接收装置;
11、所述通信模块还用于若所述安全状态为安全,则当所述信息接收装置接受到所述岸基控制中心发送的所述第一控制指令时,将所述第一控制指令发送至控制执行模块;
12、所述控制执行模块还用于判断所述通信模块与所述岸基控制中心的网络是否稳定;若所述通信模块与所述岸基控制中心的网络稳定,则控制所述目标船舶根据所述第一控制指令航行;若所述通信模块与所述岸基控制中心的网络不稳定,则根据所述目标船舶在前一刻的安全状态和第一模型,预测所述目标船舶的第二控制指令,并控制所述目标船舶根据所述第二控制指令航行。
13、进一步的,所述航行数据包括目标船舶的航行数据和其他船舶的航行数据;
14、所述航行风险量评估模块还用于根据所述目标船舶的航行数据、所述其他船舶的航行数据和所述环境数据,确定所述目标船舶的最小会遇时间和最小会遇距离;根据所述最小会遇时间和所述最小会遇距离,对所述目标船舶的安全性进行评估,确定所述目标船舶安全性的评估值。
15、进一步的,所述路径规划模块还用于获取驾驶人控制指令的历史记录,根据所述航行数据和所述环境数据对所述历史数据进行预处理,得到预处理数据,并对所述预处理数据进行处理,得到驾驶人意图数据,根据预设算法对所述驾驶人意图数据进行计算,得到所述目标船舶的避碰路线。
16、进一步的,所述路径规划模块还用于通过第二模型对所述预处理数据进行迭代训练,得到目标数据;通过归一化函数对所述目标数据进行处理,得到归一化结果;对所述归一化结果进行判断,得到所述驾驶人意图数据。
17、进一步的,所述系统还包括驾驶台模块,所述驾驶台模块用于获取所述航行风险量评估模块发送的所述安全状态,并在安全状态为不安全的情况下,通过所述通信模块发出警告信息。
18、进一步的,所述驾驶模式还包括驾驶人控制模式,所述控制执行模块还用于若所述驾驶模式为驾驶人控制模式,则接受所述驾驶台模块发送的第三控制指令,并控制所述目标船舶根据所述第三控制指令航行。
19、进一步的,所述控制执行模块还用于,若所述驾驶模式为智能航行模式,则通过模型预测控制器控制所述目标船舶根据所述避碰路线航行。
20、相应的,本发明实施例还公开了一种间接共享控制的船舶驾驶方法,所述方法包括环境感知模块、航行风险量评估模块、路径规划模块、控制权切换模块和控制执行模块,所述方法包括:
21、基于所述环境感知模块获取船舶的航行数据和航行水域的环境数据;其中,所述船舶包括目标船舶;
22、基于所述路径规划模块对所述航行数据和所述环境数据进行处理,得到所述目标船舶的避碰路线;
23、根据所述航行数据和所述环境数据,确定所述航行风险量评估模块中所述目标船舶安全性的评估值,并根据所述评估值判断所述目标船舶的安全状态;
24、在所述安全状态为不安全的情况下,根据所述评估值判断所述控制权切换模块中所述目标船舶的驾驶模式;
25、在所述驾驶模式为智能航行模式的情况下,基于所述控制执行模块控制所述目标船舶根据所述避碰路线航行。
26、采用上述实施例的有益效果是所述环境感知模块用于获取目标船舶的航行数据和航行水域的环境数据;所述路径规划模块用于对所述航行数据和所述环境数据进行处理,得到所述目标船舶的避碰路线;所述航行风险量评估模块用于根据所述航行数据和所述环境数据,确定所述目标船舶安全性的评估值,并根据所述评估值判断所述目标船舶的安全状态;所述控制权切换模块用于在所述安全状态为不安全的情况下,根据所述评估值判断所述目标船舶的驾驶模式;所述控制执行模块用于在所述驾驶模式为智能航行模式的情况下,控制所述目标船舶根据所述避碰路线航行。在本发明实施例中,可以通过控制权切换模块在安全状态为不安全的情况下,通过控制权切换模块将目标船舶的驾驶模式确定为智能航行模式,以使目标船舶可以在智能航行模式的情况下,通过避碰路线航行,已解决在岸基控制系统移交驾驶权至驾驶人的过程中,驾驶人由非驾驶任务状态接管船舶容易发生事故的问题。
技术特征:
1.一种间接共享控制的船舶驾驶系统,其特征在于,所述系统包括环境感知模块、路径规划模块、航行风险量评估模块、控制权切换模块和控制执行模块;
2.根据权利要求1所述的间接共享控制的船舶驾驶系统,其特征在于,所述系统还包括通信模块,所述通信模块与岸基控制中心通信连接,所述通信模块包括信息发送装置;
3.根据权利要求2所述的间接共享控制的船舶驾驶系统,其特征在于,所述通信模块还包括信息接收装置;
4.根据权利要求1所述的间接共享控制的船舶驾驶系统,其特征在于,所述航行数据包括目标船舶的航行数据和其他船舶的航行数据;
5.根据权利要求1所述的间接共享控制的船舶驾驶系统,其特征在于,所述路径规划模块还用于获取驾驶人控制指令的历史记录,根据所述航行数据和所述环境数据对所述历史数据进行预处理,得到预处理数据,并对所述预处理数据进行处理,得到驾驶人意图数据,根据预设算法对所述驾驶人意图数据进行计算,得到所述目标船舶的避碰路线。
6.根据权利要求5所述的间接共享控制的船舶驾驶系统,其特征在于,所述路径规划模块还用于通过第二模型对所述预处理数据进行迭代训练,得到目标数据;通过归一化函数对所述目标数据进行处理,得到归一化结果;对所述归一化结果进行判断,得到所述驾驶人意图数据。
7.根据权利要求2所述的间接共享控制的船舶驾驶系统,其特征在于,所述系统还包括驾驶台模块,所述驾驶台模块用于获取所述航行风险量评估模块发送的所述安全状态,并在安全状态为不安全的情况下,通过所述通信模块发出警告信息。
8.根据权利要求7所述的间接共享控制的船舶驾驶系统,其特征在于,所述驾驶模式还包括驾驶人控制模式;
9.根据权利要求1所述的间接共享控制的船舶驾驶系统,其特征在于,所述控制执行模块还用于若所述驾驶模式为智能航行模式,则通过模型预测控制器控制所述目标船舶根据所述避碰路线航行。
10.一种间接共享控制的船舶驾驶方法,其特征在于,应用于如权利要求1-9任一项所述的间接共享控制的船舶驾驶系统,所述方法包括:
技术总结
本发明涉及一种间接共享控制的船舶驾驶系统和方法,其包括环境感知模块获取船舶的航行数据和航行水域的环境数据;路径规划模块对航行数据和环境数据进行处理,得到本船舶的避碰路线;航行风险量评估模块根据航行数据和环境数据,确定本船舶安全性的评估值,并根据评估值判断本船舶的安全状态;控制权切换模块在安全状态为不安全的情况下,根据评估值判断本船舶的驾驶模式;控制执行模块在驾驶模式为智能航行模式的情况下,控制本船舶根据避碰路线航行。在本发明实施例中,本船舶可以在智能航行模式的情况下,通过避碰路线航行,已解决在岸基控制系统移交驾驶权至驾驶人的过程中,驾驶人由非驾驶任务状态接管船舶容易发生事故的问题。
技术研发人员:柳晨光,陶体硕,郑华荣,初秀民,贺治卜,吴文祥,吴勇
受保护的技术使用者:武汉理工大学重庆研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!