一种机床旋转轴跃度最优的五轴加工连续刀具姿态光顺方法
本发明属于复杂曲面五轴数控机床加工,尤其涉及一种机床旋转轴跃度最优的五轴加工连续刀具姿态光顺方法。
背景技术:
1、目前,五轴数控加工仍是复杂曲面零件高效高质加工的主要技术手段。五轴数控机床相较于三轴机床多出两个旋转轴,因而提高了加工过程中的避障能力和灵活性,但同时也引入了刀具姿态即刀轴矢量控制上的难题。五轴加工刀具姿态运动规划不仅要从几何学层面考虑加工精度、避免干涉碰撞,同时必须考虑刀具姿态变化的光顺性,以保证机床旋转轴运动学特性不超出执行机构本身的驱动极限。其中,跃度指标作为机床旋转轴运动的高阶运动学特性,直接影响执行器的运动精度及响应特性,进而影响加工过程中的跟踪误差及加工精度。因此,机床旋转轴跃度最优的五轴加工连续刀具姿态光顺对于旋转轴执行机构的运动学特性提升具有重要意义。然而,旋转轴运动的跃度即角加速度变化率是其运动轨迹对时间的三阶导,对差分计算的离散步长具有高度数值敏感性,导致目前面向旋转轴运动性能的五轴加工刀具姿态优化方法多集中于旋转轴角速度或角加速度层面上的优化,很少能够实现机床旋转轴跃度最优的刀具姿态优化,导致难以实现旋转轴运动的高阶光顺。文献“ho m c,hwang y r,hu c h.five-axis tool orientation smoothing usingquaternion interpolation algorithm[j].international journal of machine toolsand manufacture,2003,43(12):1259-1267.”公开了一种基于四元数插值方法的刀具姿态光顺方法,通过在给定关键刀位间实施姿态插值生成中间刀轴矢量,在工件坐标系内实现了刀具姿态的光顺变化。但考虑到工件坐标系到机床坐标系的逆向运动学属非线性变换,该方法难以保证生成的刀轴矢量满足机床旋转轴的驱动极限。文献“hu p,tangk.improving the dynamics of five-axis machining through optimization ofworkpiece setup and tool orientations[j].computer-aided design,2011,43(12):1693-1706.”在机床坐标系内修调旋转轴角度,以旋转轴的角加速度变化最小为目标规划出光顺变化的刀轴矢量。但该方法生成的刀轴矢量属离散刀位而非连续的刀具运动,而且不涉及本发明所解决的机床旋转轴跃度最优的刀具姿态优化。贾振元等人的发明专利“复杂曲面五轴数控加工刀矢的运动学控制方法”(专利号:zl201310451610.9)对机床旋转轴的角速度及角加速度进行反复校验,以期获得运动学性能更优的刀轴矢量。但该方法同样不涉及机床旋转轴跃度层面的优化,难以获得高阶光顺的刀轴矢量。文献“lu y a,wang cy,sui j b,et al.smoothing rotary axes movements for ball-end milling based onthe gradient-based differential evolution method[j].journal of manufacturingscience and engineering,transactions of the asme,2018,140(12).”以加权的方式构建包含旋转轴运动一阶、二阶及三阶运动学特性的目标函数,并借助差分进化算法予以求解,从而获得机床坐标系内光顺的刀轴矢量。与该方法相比,本发明给出了旋转轴运动学特性的b样条形式的简洁表达,并基于b样条曲线的严格凸包性质给出了旋转轴驱动极限的相关硬约束,取代了加权形式的软约束,且建立了更加高效的二次规划模型以实现跃度层面最优的刀轴矢量光顺,避免了进化算法由于解的维数过高而陷入局部最优的问题。到目前为止,基于运动约束线性化并直接考虑机床旋转轴跃度最优的五轴加工连续刀具姿态光顺方法尚未在相关文献和专利中出现。
技术实现思路
1、为了在跃度层面提高机床旋转轴的运动学特性,实现刀轴矢量的高阶光顺,本发明提出了一种机床旋转轴跃度最优的五轴加工连续刀具姿态光顺方法。
2、本发明的技术方案如下:一种机床旋转轴跃度最优的五轴加工连续刀具姿态光顺方法,将机床旋转轴角度坐标表示为连续的b样条曲线,推导出旋转轴角速度、角加速度及跃度的连续b样条参数化数学表达式;通过b样条曲线的凸包性质,将机床旋转轴的非线性运动学约束表示为关于b样条控制系数组合的线性解析关系式;基于刀具姿态规划和干涉检测间轮换迭代的贪心求解策略;建立以旋转轴跃度最优为目标的二次规划模型,从而获得满足运动和几何约束的跃度最优刀具姿态;
3、具体包括步骤如下:
4、步骤1)将机床旋转轴角度坐标表示为连续b样条曲线形式:
5、
6、式中,*取a或c,分别代表机床a轴、机床c轴;为旋转轴b样条曲线的控制系数,j为控制系数的序号,n为控制系数的总数;b样条的次数k取为固定值;u为规范弧长参数,满足uσ=s,s为给定刀位点曲线的弧长参数,σ为刀位点曲线的总长度;nj,k(u)为b样条基函数,其定义如下:
7、
8、式中,u=[u0,u1,...,un+k+1]为b样条基函数的节点矢量,指定为与对应刀位点曲线的节点矢量相同或依据刀位点分布获得;
9、(φa(u),φc(u))为旋转轴a轴和旋转轴c轴的坐标,即a轴、c轴的旋转角,与刀轴矢量(ox(u),oy(u),oz(u))的变换过程即逆向运动学变换如下:
10、
11、步骤2)给出旋转轴角速度、角加速度及跃度的连续b样条参数化数学表达式;旋转轴角速度ω*(u)、角加速度a*(u)及跃度j*(u)可由φ*(u)对时间求一阶、二阶及三阶导:
12、
13、考虑到刀位规划和进给率定制通常是串行设计模式,且前者先于后者。因此,在刀位规划阶段通常将进给率设置为常数,即故式(4)可简化为:
14、
15、其中,f和σ均为常数。及分别为旋转轴坐标φ*(u)对参数u的一阶、二阶及三阶导,可由如下的公式计算得出:
16、
17、式中,为φ*(u)对参数u的r阶导数对应的控制系数;将及代入式(5),可以得到旋转轴角速度、角加速度及跃度的线性解析表达形式:
18、
19、将及视作各阶运动学特性曲线的控制系数,则旋转轴角度的角速度、角加速度及跃度均呈b样条形式。
20、步骤3)对旋转轴的非线性运动学约束进行线性化;为满足运动学约束,要求各阶运动学特性均不大于各自的驱动极限;
21、
22、式中,及分别为旋转轴的最大角速度、角加速度及跃度。由式(7)及式(8)可知该运动学约束为半无限约束,求解难度大。根据式(7)所示的各阶运动学特性的b样条表示形式,以及b样条曲线的凸包性质,给出关于运动学约束的充分条件如下:
23、
24、综合式(6)可知,式(9)所示的各阶运动学约束均表示为关于b样条控制系数组合的线性解析关系式,故实现了运动学约束同旋转轴运动曲线控制系数的线性化表示。由于机床逆向运动学变换的解空间限制,旋转轴坐标变化范围存在上下界,考虑逆向运动学变换的其中一个解空间,式(3)所示的逆向运动学变换的值域,φa(u)∈[0,π],φc(u)∈(-π,π],亦为半无限约束,通过约束其控制系数的方式;将0≤φa(u)≤π及-π<φc(u)≤π线性化如下:
25、
26、式中,
27、步骤4)建立旋转轴跃度最优的目标函数;令机床a轴、c轴的旋转角跃度的平方积分最小,达到最优跃度:
28、
29、将代入式(11),该目标函数可化简为:
30、
31、式中,可由数值积分得到;目标函数中的正系数可忽略。
32、则式(11)目标函数记作:
33、
34、式中,设计变量h为(n+1)×(n+1)的实对称矩阵;且带宽为(2k+1),矩阵元素如下:
35、
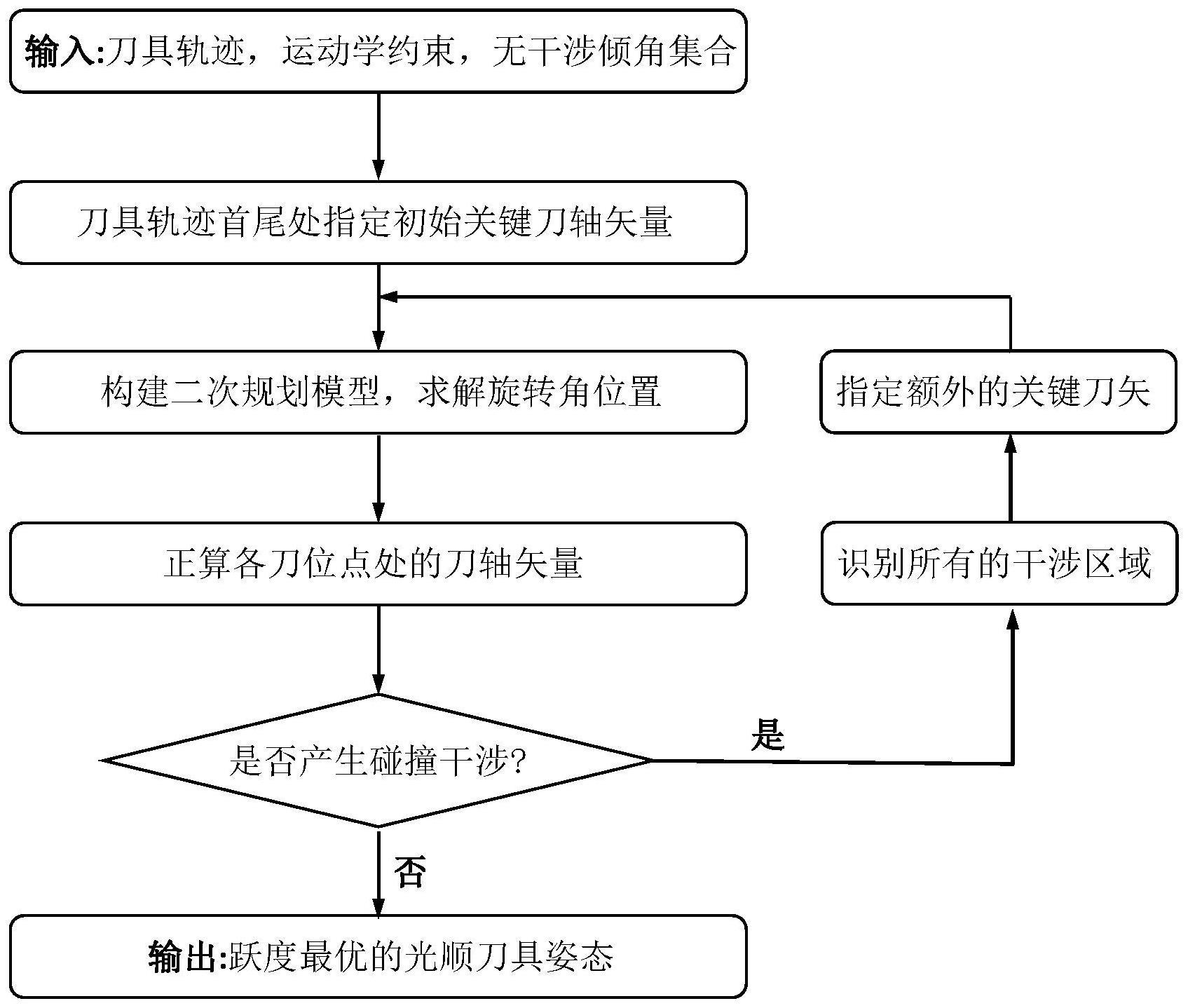
36、步骤5)解耦刀具姿态规划中的几何约束及运动学约束,建立以旋转轴跃度最优为目标的二次规划模型;刀具姿态规划过程的重要前提是所生成的刀轴矢量无干涉,即满足几何约束,为此,提出基于关键刀位处刀轴矢量的贪心求解策略,实现刀具姿态规划和干涉检测间的轮换迭代。
37、首先,在刀具轨迹两端点处以相对曲面法矢倾斜固定倾角的方式指定初始关键刀矢,得到初始关键刀矢对应的旋转轴坐标:
38、
39、其中,为刀具轨迹端点处所指定关键刀矢对应的旋转轴坐标;综合式(9)、式(10)、式(13)及式(15),构建如下二次规划模型:
40、
41、式中,及分别为式(15)、式(9)及式(10)的矩阵形式;求解式(16)获得插值于初始关键刀矢的光顺旋转轴运动;
42、通过机床正向运动学正算所有刀位点处由式(16)确定的光顺旋转轴运动对应的初始刀轴矢量,并对照各刀位点处已求取的无干涉倾角集合,判断是否发生干涉;当存在发生干涉的初始刀轴矢量,搜索得到一系列由相邻且发生干涉的初始刀轴矢量组成的干涉发生区间,并在每个干涉发生区间内按如下准则确定新的关键刀矢:
43、
44、式中,rtot为第t个干涉发生区间内所指定的关键刀矢;os,t为第t个干涉发生区间内第s个刀位点处的初始刀轴矢量;为无干涉倾角集合中与os,t局部倾角相差平方和最小的无干涉刀轴矢量;
45、记新增的关键刀矢所对应的参数和旋转角分别为及则插值于关键刀矢所需的约束可表示为:
46、
47、考虑更新后的关键刀矢约束,将式(16)所示的二次规划模型中的约束重写为并重新求解式(16);
48、
49、式中,表示更新后的关键刀矢约束,其具体形式如下:
50、
51、对于重新求解式(16)所获得新的刀轴矢量规划结果,重新对其进行干涉检查,当发生干涉,则由式(17)确定新的关键刀矢,完成刀具姿态规划和干涉检测间的轮换迭代,直至无干涉发生,从而实现机床旋转轴跃度最优的五轴加工连续刀具姿态光顺。
52、所述确定节点矢量u的方法依据刀位点是否为连续形式,采取不同的指定方法:当刀位点为连续b样条形式,则指定为与对应刀位点曲线的节点矢量相同;当刀位点为离散形式,则依据刀位点分布由向心参数法得出。
53、所述求解式(16)的方法采用起作用集法。
54、所述各刀位点处的无干涉倾角集合基于可行空间的方法获得,求取过程如下:
55、(1)对刀具姿态的局部倾角即前倾角α和侧偏角β进行均匀采样,构造离散的采样网格;
56、(2)对于采样网格的每个网格点,检测加工曲面、障碍物及夹具与刀具曲面、刀柄之间的接触关系,判断是否发生碰撞干涉;
57、(3)当采样网格的四个角点均不发生碰撞干涉,则该采样网格被认为是无干涉子空间,所有的无干涉子空间的并集构成该刀位点处的无干涉倾角集合。
58、所述b样条的次数k取值为5。
59、所述刀具姿态规划和干涉检测间轮换迭代的贪心求解策略,刀具姿态规划采用的是二次规划方法,它与干涉检测形成了轮换迭代,属于贪心求解的范畴。该策略成功实现了几何约束及运动学约束的解耦,并据此建立了如式(16)及式(19)的二次规划模型,实现跃度最优的刀具姿态规划。
60、本发明的有益效果是:首先,将旋转轴角度坐标表示为连续的b样条曲线,推导出旋转轴角速度、角加速度及跃度的连续b样条参数化数学表达式,消除旋转轴运动参数对于离散差分计算的数值敏感;充分利用b样条曲线的凸包性质,将旋转轴的非线性运动学约束表示为关于b样条控制系数组合的线性解析关系式,实现非线性运动学约束的线性化表达;进而,提出刀具姿态规划和干涉检测间轮换迭代的贪心求解策略,实现加工干涉几何约束与运动学约束的解耦;在此基础上,建立了以旋转轴跃度最优为目标的二次规划模型,从而获得满足运动和几何约束的跃度最优刀具姿态。本发明方法既实现了机床运动学约束的连续化及线性化,同时推求了旋转轴跃度最优为目标的简洁求解模型,实现了机床旋转轴运动的高阶光顺。
- 还没有人留言评论。精彩留言会获得点赞!