一种运维车和运维方法与流程
本发明涉及太阳能光伏,特别涉及一种运维车和运维方法。
背景技术:
1、光伏电站是指一种利用太阳光能、采用特殊材料诸如晶硅板、逆变器等电子元件组成的发电体系,与电网相连并向电网输送电力的光伏发电系统。光伏电站经过长时间的户外运行后,空气中的尘埃会大量覆盖在光伏组件表面并阻挡了部分太阳辐射量,导致照射到光伏组件表面的有效面积减少;另一方面灰尘会影响光伏组件表面硅晶的透射率,灰尘的沉积浓度越大,光伏组件的透射率越低,其吸收的太阳辐射也越低。光伏组件接受的太阳辐射量减少,光伏发电效率随之下降。
2、目前光伏电站中对光伏组件的清洗方式主要是自然清洁和人工清洁。自然清洁是利用大自然的雨水天气和风力等对光伏组件进行除尘;自然清洁适用于雨水较多的南方,受天气影响较大。人工清洁是通过人力使用清洁工具,例如绒拖把、吹风机、绒抹布等,借助清洁工具对光伏组件表面进行清洁;人工清洁适用于绝大部分地区,但对于大型地面光伏电站来说,一次完整人工清洁的人力成本较高。
技术实现思路
1、有鉴于此,本发明旨在提出一种运维车,以解决或部分解决现有的光伏电站中对光伏组件的清洗方式具有受天气影响较大,以及人力成本较高的问题。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、第一方面,本发明公开了一种运维车,所述运维车包括相互连接的自动驾驶模块、运维信息采集分析模块和运维模块;
4、所述自动驾驶模块用于使所述运维车巡航,在所述运维车移动到巡航路径上的停车位置时停止移动,以及在所述运维车完成运维后,使所述运维车根据所述巡航路径继续巡航;
5、所述运维信息采集分析模块用于获取所述巡航路径上的运维信息,根据所述运维信息判断所述巡航路径上是否具有停车位置;
6、所述运维模块用于获取运维信息,且在所述运维车停止在所述巡航路径上的停车位置时,启动运维模式。
7、进一步的,所述自动驾驶模块包括巡航控制单元、多个超声波传感器、自动紧急制动模组,所述巡航控制单元与所述超声波传感器、所述自动紧急制动模组、所述运维信息采集分析模块和所述运维模块连接;
8、多个所述超声波传感器设于所述运维车的车身外周,用于检测所述巡航路径上的障碍物;
9、所述巡航控制单元用于根据障碍物的信息控制所述自动紧急制动模组动作,以避免所述运维车与所述障碍物碰撞。
10、进一步的,所述运维信息采集分析模块包括视觉slam单元和分析单元,所述视觉slam单元(4)和所述分析单元连接;
11、所述视觉slam单元用于获取所述巡航路径侧方的待清洁件表面的图片数据;
12、所述分析单元用于根据所述图片数据确定所述待清洁件表面的脏污程度,将所述脏污程度与清洗阈值进行对比,且在所述脏污程度大于等于所述清洗阈值时,确定该所述待清洁件对应的清洗位置为所述巡航路径上的停车位置。
13、进一步的,所述运维信息采集分析模块还包括与所述分析单元连接的红外线检测单元,所述红外线检测单元用于获取目标区域的故障信息;
14、所述分析单元用于分析所述故障信息,并将所述故障信息传输至外部。
15、进一步的,所述运维模块包括运维单元和运维控制单元,所述运维单元与所述运维控制单元连接,所述运维控制单元控制所述运维单元清洗待清洁件表面。
16、进一步的,所述运维单元包括水箱和喷枪组件;所述水箱设于所述运维车的车身内部,所述喷枪组件与所述水箱和所述运维控制单元连接,所述喷枪组件受所述运维控制单元的控制用于向所述待清洁件的表面喷清洗液。
17、进一步的,所述运维车还包括监控模块,所述监控模块用于监控所述运维车的运行情况。
18、进一步的,所述运行情况包括水箱中清洗液的体积。
19、进一步的,所述视觉slam单元用于获取基地照片,所述分析单元根据所述基地照片规划所述巡航路径。
20、第二方面,本发明还公开了一种运维方法,所述方法包括:
21、运维车开启自动巡航;
22、获取巡航路径上的运维信息,根据所述运维信息判断所述巡航路径上是否具有停车位置;
23、在所述巡航路径上具有停车位置时,所述运维车移动到所述巡航路径上的停车位置时停止移动;
24、在所述运维车停止在巡航路径上的停车位置时,运维模式启动;
25、在所述运维车完成运维时,使运维车根据所述巡航路径继续巡航;
26、在所述巡航路径上不具有停车位置时,所述运维车完成运维。
27、进一步的,所述运维信息包括待清洁件表面的脏污程度和待清洁件的故障信息。
28、进一步的,所述获取巡航路径上的运维信息,根据所述运维信息判断所述巡航路径上是否具有停车位置的步骤中还包括如下步骤;
29、获取所述巡航路径侧方的待清洁件表面的图片数据;
30、根据所述图片数据确定所述待清洁件表面的脏污程度,将所述脏污程度与清洗阈值进行对比;
31、在所述脏污程度大于等于所述清洗阈值时,该所述待清洁件对应的清洗位置为所述巡航路径上的停车位置;
32、在所述脏污程度小于所述清洗阈值时,该所述待清洁件对应的清洗位置不是停车位置。
33、相对于现有技术,本发明所述的运维车具有以下优势:
34、本发明的运维车,自动驾驶模块使运维车巡航,运维车在巡航过程中,运维信息采集分析模块用于获取巡航路径上的运维信息,根据运维信息判断巡航路径上是否具有停车位置;在巡航路径上具有停车位置时,自动驾驶模块在运维车移动到巡航路径上的停车位置时使运维车停止移动;同时,运维模块用于获取运维信息,且在运维车停止在巡航路径上的停车位置时,启动运维模式。本申请实施例的运维车可以自动巡航和停车,在巡航过程中获取运维信息,并在需要运维以及运维车停止在停车位置后,启动运维模式进行运维工作,运维车可以自动完成运维工作,不受天气影响,自动化程度高,以及有效节省运维人工成本。
35、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种运维车,其特征在于,所述运维车包括相互连接的自动驾驶模块、运维信息采集分析模块和运维模块;
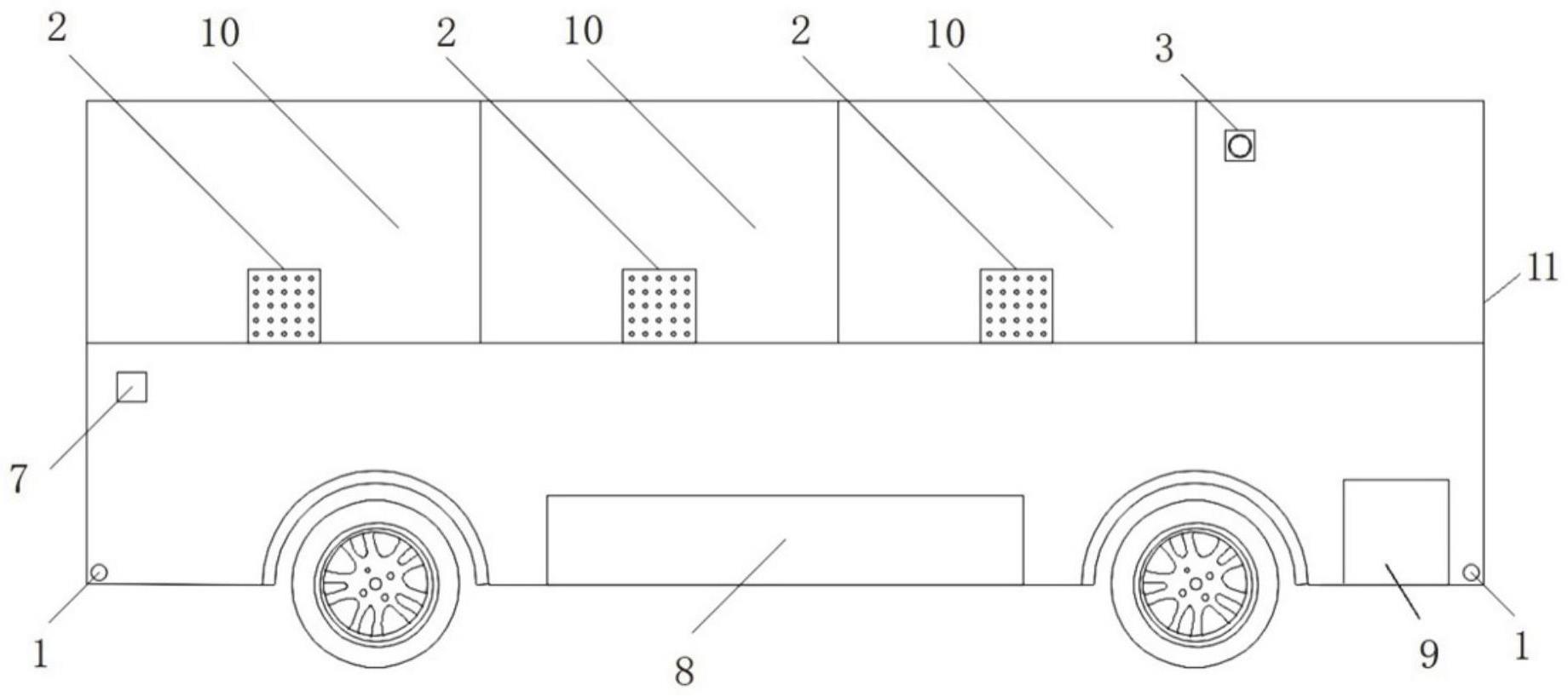
2.根据权利要求1所述的运维车,其特征在于,所述自动驾驶模块包括巡航控制单元、多个超声波传感器(1)、自动紧急制动模组,所述巡航控制单元与所述超声波传感器(1)、所述自动紧急制动模组、所述运维信息采集分析模块和所述运维模块连接;
3.根据权利要求1所述的运维车,其特征在于,所述运维信息采集分析模块包括视觉slam单元(4)和分析单元,所述视觉slam单元(4)和所述分析单元连接;
4.根据权利要求1或3所述的运维车,其特征在于,所述运维信息采集分析模块还包括与所述分析单元连接的红外线检测单元(3),所述红外线检测单元(3)用于获取目标区域的故障信息;
5.根据权利要求1所述的运维车,其特征在于,所述运维模块包括运维单元和运维控制单元,所述运维单元与运维控制单元连接,所述运维控制单元控制所述运维单元清洗待清洁件表面。
6.根据权利要求5所述的运维车,其特征在于,所述运维单元包括水箱(10)和喷枪组件;所述水箱(10)设于所述运维车的车身(11)内部,所述喷枪组件与所述水箱(10)和所述运维控制单元连接,所述喷枪组件受所述运维控制单元的控制用于向所述待清洁件的表面喷清洗液。
7.根据权利要求1所述的运维车,其特征在于,所述运维车还包括监控模块,所述监控模块用于监控所述运维车的运行情况。
8.根据权利要求7所述的运维车,其特征在于,所述运行情况包括水箱(10)中清洗液的体积。
9.根据权利要求3所述的运维车,其特征在于,所述视觉slam单元(4)用于获取基地照片,所述分析单元根据所述基地照片规划所述巡航路径。
10.一种运维方法,其特征在于,所述方法包括:
11.根据权利要求10所述的运维方法,其特征在于,所述运维信息包括待清洁件表面的脏污程度和所述待清洁件的故障信息。
12.根据权利要求11所述的运维方法,其特征在于,所述获取巡航路径上的运维信息,根据所述运维信息判断所述巡航路径上是否具有停车位置的步骤中还包括如下步骤;
技术总结
本发明涉及太阳能光伏技术领域,特别涉及一种运维车和运维方法。运维车包括相互连接的自动驾驶模块、运维信息采集分析模块和运维模块;自动驾驶模块用于使运维车巡航,在运维车移动到巡航路径上的停车位置时停止移动,以及在运维车完成运维后,使运维车根据巡航路径继续巡航;运维信息采集分析模块用于获取巡航路径上的运维信息,根据运维信息判断巡航路径上是否具有停车位置;运维模块用于获取运维信息,且在运维车停止在巡航路径上的停车位置时,启动运维模式。运维车可以自动完成运维工作,不受天气影响,自动化程度高,以及有效节省运维人工成本。
技术研发人员:蒋苏蜀,韩利生,薄俊忍,陈铁军
受保护的技术使用者:一道新能源科技(衢州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!