一种散养猪高效监控系统及方法与流程
本发明属于散养猪养殖领域,具体涉及一种散养猪高效监控系统及方法。
背景技术:
1、猪肉是人们餐桌上的常见肉类,由于深受广大人民群众的喜爱,其年产量非常巨大,为了保证其年产量,通常在饲养场内对猪进行室内圈养。但是,随着生活品质的提高,人们越来越关注猪肉的品质和安全,对猪进行室外散养成为一种流行趋势。
2、在对猪进行室外散养通常是白天将猪赶至室外放养,晚上仍然需要将猪赶回猪圈。目前,在采用散养模式时,在散养场只能由工作人员将猪赶回猪圈,劳动强度大且回圈效率较低。
技术实现思路
1、本发明提供一种散养猪高效监控系统及方法,以解决目前只能由工作人员将猪赶回猪圈的问题。
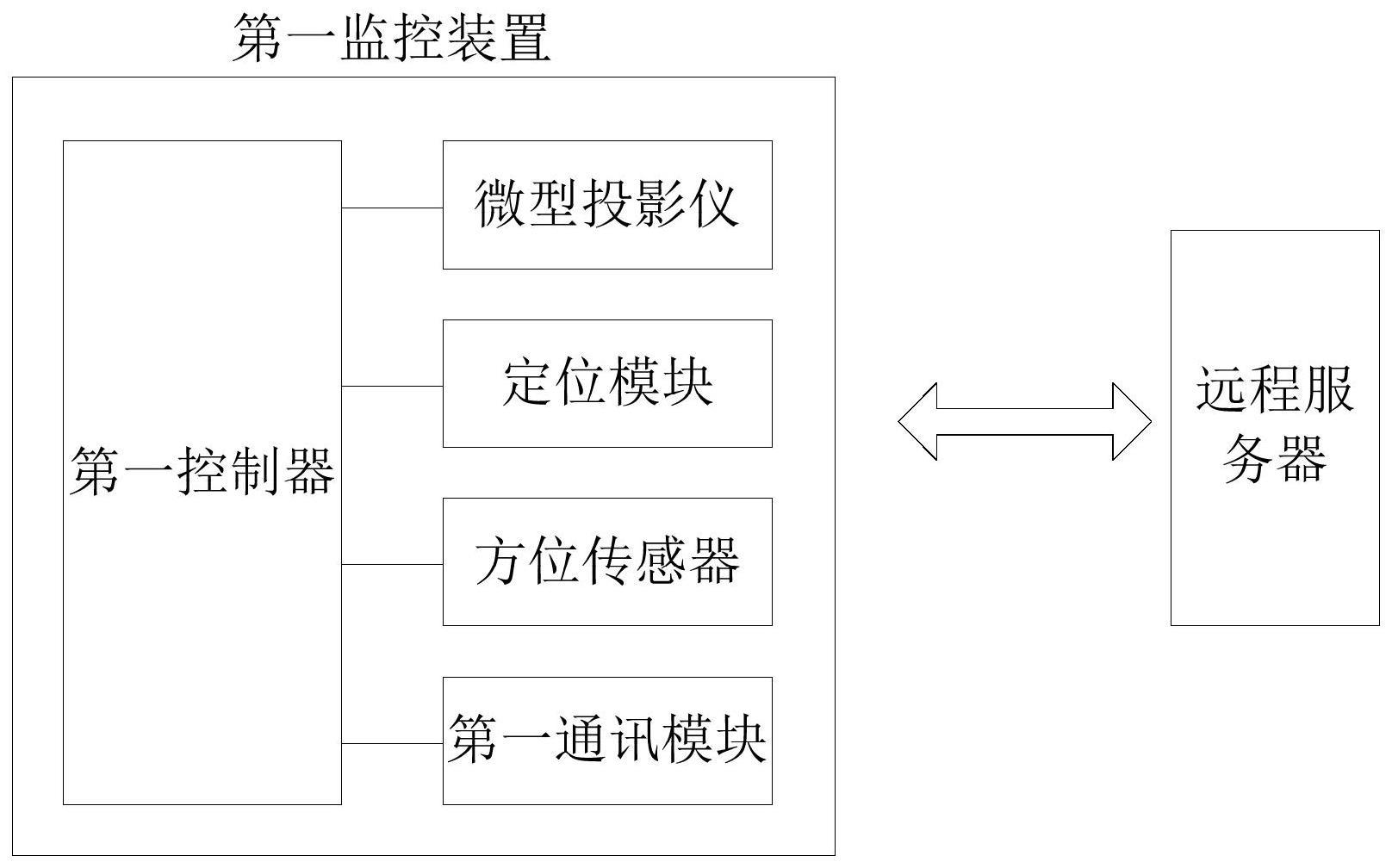
2、根据本发明实施例的第一方面,提供一种散养猪高效监控系统,包括针对每个猪群中的领头猪设置并佩戴在该领头猪上的第一监控装置,所述第一监控装置包括第一控制器以及分别与该第一控制器连接的微型投影仪、定位模块、方位传感器和第一通讯模块;还包括远程服务器,所述第一控制器通过该第一通讯模块与该远程服务器通讯;所述远程服务器向对应领头猪的第一控制器发送回圈指令;该领头猪的第一控制器接收到回圈指令后,将该第一控制器的第一标识信息以及其定位模块提供的领头猪定位信息发送给该远程服务器;
3、所述远程服务器根据该第一标识信息,将目标猪圈相对于该领头猪的方位信息发送给该领头猪的第一控制器;该领头猪的第一控制器根据该方位信息以及其方位传感器提供的领头猪头部朝向信息,控制其微型投影仪进行阻挡墙壁投影,以使该领头猪朝着该目标猪圈的方向前行。
4、在一种可选的实现方式中,所述第一监控装置还包括与其第一控制器连接的旋转机构和第二通讯模块;
5、针对每个猪群中除领头猪外的其他散养猪,该散养猪佩戴有第二监控装置,所述第二监控装置包括第二控制器以及分别与该第二控制器连接的方位传感器和第二通讯模块;该领头猪的第一控制器与该散养猪的第二控制器之间通过两者的第二通讯模块进行信息交互;
6、所述散养猪的第二控制器用于将其方位传感器提供的散养猪头部朝向信息,发送给该领头猪的第一控制器;
7、所述领头猪的第一控制器根据其领头猪头部朝向信息以及各个散养猪头部朝向信息,确定该领头猪所在猪群的实际头部朝向,此后根据该方位信息以及该猪群的实际头部朝向信息,控制旋转机构带动其微型投影仪转动,在转动到位后控制其微型投影仪进行阻挡墙壁投影,以使该领头猪朝着该目标猪圈的方向前行。
8、在另一种可选的实现方式中,在猪圈处还设有摄像装置,所述摄像装置与该远程服务器连接,其对该猪圈处的视频信息进行采集,根据该视频信息判断是否有猪群到达猪圈,并将有猪群到达猪圈的信息发送给该远程服务器。
9、根据本发明实施例的第二方面,还提供一种上述散养猪高效监控系统的监控方法,包括以下步骤:
10、步骤s110、远程服务器向对应领头猪的第一控制器发送回圈指令;
11、步骤s120、对应领头猪的第一控制器在接收到该回圈指令后,将第一控制器的第一标识信息以及其定位模块提供的领头猪定位信息,发送给所述远程服务器;
12、步骤s130、所述远程服务器根据该领头猪的定位信息,确定距离该领头猪较近且未占用的目标猪圈,从而确定该目标猪圈相对于该领头猪的方位,根据该第一标识信息,将该目标猪圈相对于该领头猪的方位信息发送给该领头猪的第一控制器;
13、步骤s140、所述领头猪的第一控制器根据该方位信息以及其方位传感器提供的领头猪头部朝向信息,判断该领头猪是否朝着该目标猪圈前行,若是,则返回执行本步骤,否则,控制其微型投影仪将阻挡墙壁投影至该领头猪的正前面,以使该领头猪被迫转变前行方向,直至该领头猪朝着该目标猪圈前行,返回执行本步骤。
14、在一种可选的实现方式中,所述步骤s140具体包括:步骤s141、所述领头猪的第一控制器在设定范围内广播该方位信息,以使在该设定范围内的散养猪的第二控制器接收到该方位信息;
15、步骤s142、针对该设定范围内接收到该方位信息的每个散养猪,该散养猪的第二控制器将该第二控制器的第二标识信息以及其方位传感器提供的散养猪头部朝向信息,发送给该领头猪的第一控制器;
16、步骤s143、该领头猪的第一控制器根据该第二标识信息,确定属于该领头猪所在猪群的散养猪,第一次回圈时该领头猪的第一控制器接收到的第二标识信息对应的散养猪即为该领头猪所在猪群的散养猪;
17、步骤s144、该领头猪的第一控制器根据属于该领头猪所在猪群的散养猪头部朝向以及其方位传感器提供的领头猪头部朝向,判断该领头猪所在猪群中是否有对应比例的散养猪头部朝向与该领头猪头部朝向相同,若是,则执行步骤s145;否则,执行步骤s146;
18、步骤s145、该领头猪的第一控制器根据该方位信息以及其方位传感器提供的领头猪头部朝向信息,判断该领头猪是否朝着该目标猪圈前行,若是,则返回执行步骤s141;否则,控制其微型投影仪针对该领头猪进行阻挡墙壁投影,以使该领头猪被迫转变前行方向,返回执行步骤s141,直至该领头猪朝着该目标猪圈前行;
19、步骤s146、该领头猪的第一控制器将该领头猪所在猪群中,该对应比例的散养猪的头部朝向作为该猪群的实际头部朝向,根据其广播该方位信息和接收到散养猪头部朝向信息的时刻,确定该对应比例的散养猪分别与该领头猪的距离,根据该领头猪头部朝向信息、该实际头部朝向以及该确定的距离中的最大值,控制该旋转机构带动该微型投影仪转动,在转动到位后控制该微型投影仪针对该对应比例的散养猪进行阻挡墙壁投影,以使该对应比例的散养猪被迫转变前行方向,返回执行步骤s141,直至该对应比例的散养猪朝着该目标猪圈前行。
20、在另一种可选的实现方式中,每个猪群中领头猪以及除领头猪外的其他散养猪上都设有用于对其身份进行标识的编码,该编码与控制器标识信息对应,以便管理员根据该编码,将第一监控装置佩戴在对应领头猪上;
21、所述步骤s146中,该领头猪的第一控制器在确定该对应比例的散养猪分别与该领头猪的距离后,还查找出该确定的距离中最大值对应的散养猪的第二控制器的第二标识信息;
22、在所述步骤s146之后,还包括:
23、步骤s147、该领头猪的第一控制器对每次查找出的第二标识信息进行数量统计,将回圈过程中统计到的数量最多的第二标识信息作为第三标识信息;
24、步骤s148、该领头猪的第一控制器在确定其猪群已回圈后,将其第一标识信息以及其当前接收到的第二标识信息发送给该远程服务器,并将其当前接收到所有第二标识信息作为该猪群的散养猪的第二标识信息进行存储,在统计出该第三标识信息时,将该第三标识信息发送给该远程服务器;
25、步骤s149、所述远程服务器判断回圈后是否接收到该第三标识信息,若接收到,则首先将该第三标记信息对应的编码提供给管理员,以便该管理员将该第一监控装置从初始领头猪身上取下,佩戴在具有该编码的猪上,使该编码的猪作为新领头猪,将该第一标记信息与该新领头猪的编码对应,将该初始领头猪作为该猪群的散养猪,将该新领头猪上的第二监控装置取下佩戴在该初始领头猪上,将该第二监控装置的第二标识信息与该初始领头猪的编码对应;然后在接收到管理员发送的调整完成指令后,将当前接收到的所有第二标识信息作为该猪群的散养猪的第二标识信息;
26、若未接收到,则将该第一标识信息对应的散养猪作为该猪群的领头猪,将当前接收到的所有第二标识信息作为该猪群的散养猪的第二标识信息。
27、在另一种可选的实现方式中,在所述步骤s148之前,还包括:
28、在目标猪圈位置处设置的摄像装置对该猪圈处的视频信息进行采集,根据该视频信息判断是否有猪群到达猪圈,并将有猪群到达猪圈的信息发送给该远程服务器;
29、所述远程服务器在接收到有猪圈到达猪圈的信息后,向对应领头猪的第一控制器发送到圈指令;
30、该领头猪的第一控制器接收到到圈指令后,确定其所在猪群已回圈,此后在设定范围内广播该方位信息,以使在该设定范围内的散养猪的第二控制器接收到该方位信息后,将该第二控制器的第二标识信息发送给该领头猪的第一控制器。
31、在另一种可选的实现方式中,在回圈过程中,所述步骤s142之后,所述领头猪的第一控制器还判断是否接收到在本地存储的,该领头猪所在猪群中所有散养猪的第二标识信息,若是,则不做处理,否则,将未接收到的该猪群中对应散养猪的第二标识信息作为第四标识信息,将其第一标识信息以及该第四标识信息发送给所述远程服务器;
32、所述远程服务器将包括该第四标识信息的开始寻踪指令发送给各个领头猪的第一控制器;
33、所述领头猪的第一控制器在接收到该开始寻踪指令后,针对每次广播后接收到的第二标识信息,判断该第二标识信息中是否存在该第四标识信息,若存在,则将其第一标识信息、该第四标识信息及其定位模块提供的定位信息发送给该远程服务器;
34、所述远程服务器判断该第四标识信息对应散养猪是否属于该第一标识信息对应领头猪所在猪群,若是,则向各个领头猪的第一控制器发送停止寻踪指令,否则,对该第四标识信息和定位信息进行存储,并向各个领头猪的第一控制器发送开始寻踪指令。
35、在另一种可选的实现方式中,所述领头猪的第一控制器在本地还存储有散养场所地形图,所述步骤s130中,所述远程服务器还将该目标猪圈的位置信息发送给该领头猪的第一控制器;
36、在步骤s140之前,还包括:该领头猪的第一控制器在接收到该目标猪圈的位置信息后,还根据该目标猪圈的位置信息及其定位模块提供的领头猪定位信息,规划出从领头猪所在位置到该目标猪圈的前行路线,并对该前行路线中不同位置处领头猪的头部理论朝向作为不同位置处的方位信息;
37、所述步骤s140和s145中,所述领头猪的第一控制器根据该方位信息以及其方位传感器提供的领头猪头部朝向信息,判断该领头猪是否朝着该目标猪圈的方向前行具体包括:
38、所述领头猪的第一控制器根据该前行路线中不同位置处的方位信息、其定位模块提供的领头猪定位信息以及其方位传感器提供的领头猪头部朝向信息,判断该领头猪是否沿着该前行路线前行;
39、所述步骤s146中,该对应比例的散养猪朝着该目标猪圈的方向前行具体包括:该对应比例的散养猪沿着该前行路线前行。
40、在另一种可选的实现方式中,在步骤s145中直至该领头猪朝着该目标猪圈前行以及步骤s146中直至该对应比例的散养猪朝着该目标猪圈前行后,该领头猪的第一控制器还根据其定位模块提供的定位信息,判断该猪群是否处于行走状态,若是,则启动定时器,在达到设定时长时,返回执行步骤s141;否则,控制启动驱赶装置,以使该猪群在该驱赶装置的作用下行走,返回执行判断该猪群是否处于行走状态的步骤。
41、本发明的有益效果是:
42、1、本发明通过针对每个猪群,使该猪群的领头猪佩戴第一监控装置,当饲养员需要对应猪群回圈时,只需要通过远程服务器向该猪群中领头猪的第一控制器发送回圈指令,领头猪的第一控制器在接收到回圈指令后将领头猪定位信息发送给远程服务器,远程服务器将目标猪圈相对于领头猪的方位信息发送给领头猪的第一控制器,领头猪的第一控制器根据该方位信息以及领头猪头部朝向信息,控制其微型投影仪进行阻挡墙壁投影,当领头猪头部朝向与到达该目标猪圈的前行方向不同时,利用阻挡墙壁对领头猪进行视线遮挡,以迫使领头猪头部头部发生转向,从而使该领头猪朝着该目标猪圈的方向前行,本发明中猪群回圈过程只依赖于远程服务器与领头猪的第一控制器之间的交互,并不需要工作人员前往找到猪群后再将猪群赶回猪圈,因此回圈效率得到了提高,此外当需要多个猪群同时回圈时,只需要由远程服务器同时向对应猪圈下发回圈指令即可,因此可以实现多个猪群同步自主回圈,进一步提高了回圈效率;
43、2、本发明通过在猪群中除领头猪外的其他散养猪上佩戴第二监控装置,对散养猪头部朝向进行监测,并根据领头猪头部朝向和其他散养猪的头部朝向来确定猪群的实际头部朝向,再根据目标猪圈相对于猪群的方位信息以及猪群的实际头部朝向,控制旋转机构带动微型投影仪转动,再转动到位后控制微型投影仪进行阻挡墙壁投影,以使该领头猪朝着该目标猪圈的方向前行,微型投影仪考虑了猪群中所有猪的头部朝向,因此即便猪群中领头猪发生了变化,也能保证猪群朝着目标猪圈的方向前行,从而提高了引导猪群自主回圈的准确性;
44、3、本发明可以对领头猪发生变化的情况进行识别,并在领头猪发生变化时及时对领头猪佩戴的监控装置进行调整,以保证引导猪群自主回圈的准确度,并且本发明将回圈时还存在的猪作为该猪群的散养猪,以便下一次回圈引导时基于更新后的猪群来进行,如此可以进一步提高自主回圈的准确性;
45、4、本发明可以对走散的散养猪的踪迹进行跟踪查询;
46、5、本发明对猪群前往目标猪圈的路线进行规划,使猪群按照规划出的路线前行,如此即便在地形复杂的散养场,也能保证猪群顺利到达目标猪圈。
- 还没有人留言评论。精彩留言会获得点赞!