一种辅助船舶远程驾驶的人机交互系统及辅助方法
本发明涉及船舶远程驾驶,尤其涉及一种辅助船舶远程驾驶的人机交互系统及辅助方法。
背景技术:
1、船舶碰撞或搁浅是水路交通系统最常见的交通事故类型,所产生的直接/间接损失通常较大。根据多年的海事事故数据与调查报告,研究人员发现,人为因素通常被认为是船舶碰撞事故的主要原因。因此,面向船舶航行时的避碰研究是非常重要的。
2、人机交互是现今智能驾驶中的热点话题。目前,船舶远程驾驶时多采用智能驾驶,这种驾驶方式重视于人与机器的交互性的重要性,通过人与机器配合的方式增强智能船舶行驶的安全性。同时,人机交互的驾驶方式有利于提高驾驶员的远程驾驶的灵活性。
3、但是,船舶危险事故中最为常见的就是搁浅与碰撞,而现有技术在船舶远程驾驶时信息获取复杂,集成化程度较低,依赖不同航电设备分别对避碰危险与搁浅进行确认与告警,人机交互体验较差,增加了驾驶员的驾驶负荷,间接增加了船舶发生危险事故而产生巨大损失的风险。
技术实现思路
1、在有鉴于此,有必要提供一种辅助船舶远程驾驶的人机交互系统及辅助方法,用以解决现有技术中船舶远程驾驶时信息获取复杂,集成化程度较低,难以对船舶危险中常见的搁浅与避碰危险实现同时预警的问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
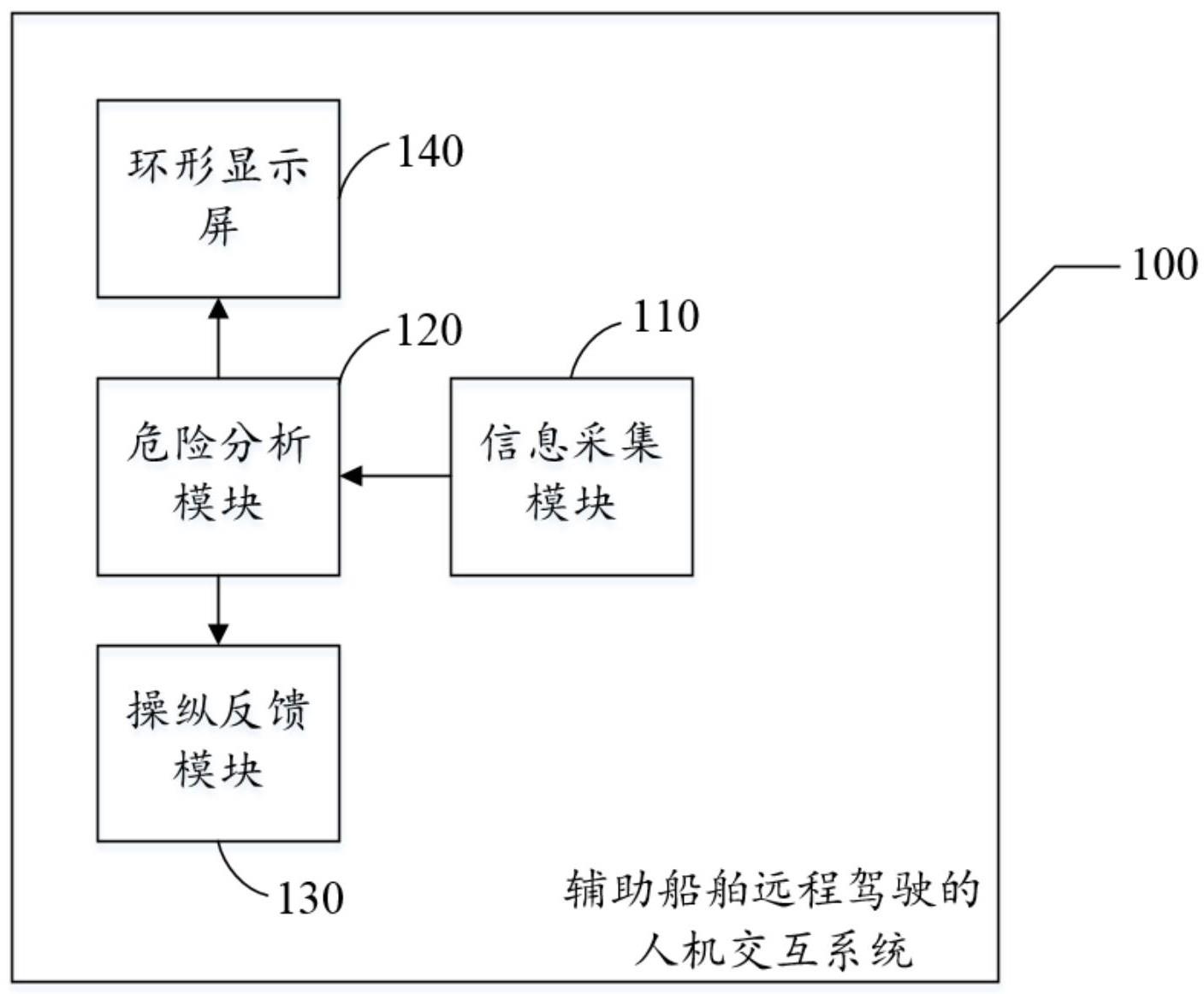
3、第一方面,本发明提供了一种辅助船舶远程驾驶的人机交互系统,其特征在于,包括:信息采集模块、危险分析模块、操纵反馈模块以及环形显示屏;其中,信息采集模块、危险分析模块以及操纵反馈模块依次连接;环形显示屏与危险分析模块连接;
4、信息采集模块用于采集受控船舶的行驶信息和受控船舶周围的动态障碍物信息和环境信息;
5、危险分析模块用于基于改进的速度障碍法,根据行驶信息和环境信息识别出碰撞速度区域和搁浅速度区域;
6、操纵反馈模块用于当受控船舶处于碰撞速度区域或搁浅速度区域时,通过力反馈方式进行预警;
7、环形显示屏用于显示受控船舶的位置、碰撞速度区域和搁浅速度区域。
8、第二方面,本发明还提供了一种船舶远程驾驶的辅助方法,基于如上述的辅助船舶远程驾驶的人机交互系统,包括:
9、采集受控船舶的位置信息和受控船舶周围的动态障碍物信息和环境信息;
10、基于改进的速度障碍法,根据受控船舶位置信息和受控船舶周围的动态障碍物信息和环境信息识别出碰撞速度区域和搁浅速度区域;
11、当受控船舶处于碰撞速度区域或搁浅速度区域时,通过力反馈方式进行预警。
12、在一些可能的实现方式中,采集受控船舶的位置信息和受控船舶周围的动态障碍物信息和环境信息,包括:
13、采集受控船舶的位置信息,对动态障碍物进行实时定位,确定动态障碍物与受控船舶的相对位置信息,并获取动态障碍物的速度信息;
14、根据受控船舶的位置信息确定第一预设范围内的动态障碍物信息;
15、根据受控船舶的位置信息获取第二预设范围内的电子海图;
16、根据电子海图确定第二预设范围内的静态障碍物信息以及水域信息。
17、在一些可能的实现方式中,基于改进的速度障碍法,根据行驶信息和环境信息识别出碰撞速度区域和搁浅速度区域,包括:
18、根据受控船舶的位置信息、动态障碍物信息和静态障碍物信息确定出碰撞速度区域集合;
19、根据受控船舶的位置信息和水域信息确定出搁浅速度区域集合;
20、在受控船舶的决策空间中标记出碰撞速度区域和搁浅速度区域。
21、在一些可能的实现方式中,根据受控船舶的位置信息、动态障碍物信息和静态障碍物信息确定出碰撞速度区域集合,包括:
22、设置受控船舶与障碍物的碰撞时刻,根据当前时刻和碰撞时刻确定碰撞航行用时;
23、根据动态障碍物信息和静态障碍物信息确定受控船舶与障碍物发生碰撞时受控船舶的碰撞位置信息;
24、根据受控船舶发生碰撞的位置信息和碰撞航行用时确定受控船舶的碰撞速度障碍区域;
25、将受控船舶的所有碰撞速度障碍区域取并集,得到受控船舶的碰撞速度区域集合。
26、在一些可能的实现方式中,根据动态障碍物信息和静态障碍物信息确定受控船舶与障碍物发生碰撞时受控船舶的碰撞位置信息,包括:
27、根据障碍物尺寸确定障碍物范围,根据受控船舶尺寸确定受控船舶范围,并根据障碍物范围和受控船舶范围设置禁止区域;
28、确定受控船舶达到禁止区域时的位置信息得到受控船舶的碰撞位置信息。
29、在一些可能的实现方式中,根据受控船舶的位置信息和水域信息确定出搁浅速度区域集合,包括:
30、获取受控船舶的吃水信息,根据吃水信息和水域信息确定受控船舶的搁浅区域;
31、根据受控船舶的位置信息和受控船舶的搁浅区域确定受控船舶的搁浅速度区域集合。
32、在一些可能的实现方式中,根据受控船舶的位置信息和受控船舶的搁浅区域确定受控船舶的搁浅速度区域集合,包括:
33、设置受控船舶与障碍物的搁浅时刻,根据当前时刻和搁浅时刻确定搁浅航行用时;
34、根据受控船舶的位置信息和受控船舶的搁浅区域确定受控船舶发生搁浅时的搁浅位置信息;
35、根据受控船舶发生搁浅的位置信息和搁浅航行用时确定受控船舶的搁浅速度障碍区域;
36、将受控船舶的所有搁浅速度障碍区域取并集,得到受控船舶的障碍物的搁浅速度区域集合。
37、在一些可能的实现方式中,获取受控船舶的吃水信息,根据吃水信息和水域信息确定受控船舶的搁浅区域,包括:
38、根据水域信息确定第二预设范围内的水深梯度;
39、确定所有受控船舶的吃水信息大于第二预设范围内的水深梯度的区域范围得到受控船舶的搁浅区域。
40、在一些可能的实现方式中,当受控船舶处于碰撞速度区域或搁浅速度区域时,通过力反馈方式进行预警,包括:
41、根据碰撞速度区域与搁浅速度区域的并集,确定危险行驶速度区域;
42、当受控船舶处于危险行驶速度区域时,通过产生阻尼力进行反馈预警。
43、采用上述实施例的有益效果是:本发明涉及一种辅助船舶远程驾驶的人机交互系统及辅助方法,该系统包括:信息采集模块、危险分析模块、操纵反馈模块以及环形显示屏;其中,所述信息采集模块、所述危险分析模块以及所述操纵反馈模块依次连接;所述环形显示屏与所述危险分析模块连接;所述信息采集模块用于采集受控船舶的行驶信息和所述受控船舶周围的环境信息;所述危险分析模块用于基于改进的速度障碍法,根据所述行驶信息和所述环境信息识别出碰撞速度区域和搁浅速度区域;所述操纵反馈模块用于当所述受控船舶处于所述碰撞速度区域或所述搁浅速度区域时,通过力反馈方式进行预警;所述环形显示屏用于显示受控船舶的位置、碰撞速度区域和搁浅速度区域。本发明涉及一种辅助船舶远程驾驶的人机交互系统及辅助方法,通过改进的速度障碍法分别识别出碰撞速度区域和搁浅速度区域,因此可以同时对船舶危险中常见的搁浅与避碰危险识别,并通过操纵反馈模块通过力反馈的方式对危险驾驶行为进行预警,提高了船舶远程行驶的安全性。
- 还没有人留言评论。精彩留言会获得点赞!