一种有限时间框架下的AUH编队协同控制方法
本发明属于水下直升机控制领域,尤其是涉及一种有限时间框架下的auh编队协同控制方法。
背景技术:
1、近年来水下自主航行器(autonomous underwater vehicle,auv)因为其在管道检测、军事防御和海洋观测等应用领域的突出优势,受到科研工作者的广泛关注。一种称为水下直升机(autonomous underwater helicopter,auh)的新型auv,由于其特殊的结构,更加适合上述水下作业任务。同时,在某些特殊的情况下,需要多个auv在保持编队构型的同时跟踪给定轨线,因此auv的编队控制问题成为一个研究热点。
2、auv编队控制的复杂性来自多个方面,包括auv具有复杂的未知非线性动力学,由于水下环境的复杂性跟踪误差难以快速收敛等。现有研究对以上问题提出了一些有效的解决方案,径向基函数神经网络(radial basis function neural network,rbfnn)广泛用于逼近系统的动力学不确定项,状态扩张观测器用于估计动力学不确定项,预设性能控制方法用于auv的控制中以加快误差的收敛速度等。
3、如公开号为cn113821028a的中国专利文献公开了一种基于分布式模型预测控制的欠驱动auv编队轨迹跟踪控制方法,利用径向基函数神经网络逼近不确定的部分系统方程,结合最小学习参数法,减小计算复杂度。
4、公开号为cn113009826a的中国专利文献公开了一种基于新型误差变换的auv预设性能轨迹跟踪控制方法,采用了改进的性能函数和新的误差变换方法,使auv轨迹跟踪误差能够在规定的时间内收敛。
5、上述方案充分研究了使用各种策略控制auv精确跟踪参考轨迹,然而,这些轨迹跟踪方法都只考虑了空间维度,并没有考虑时间维度,尚未控制路径跟踪时auv的运动速度。同时,状态扩张观测器估计动力学不确定性时,不能保证观测误差在有限时间内收敛,同样,现有技术所使用的预设性能控制方法虽然能够加快跟踪误差的收敛速度,但也不能提前设定收敛时间。另外,现有研究充分利用了rbfnn的全局逼近能力,却忽略了rbfnn的局部学习。
技术实现思路
1、本发明提供了一种有限时间框架下的auh编队协同控制方法,可以实现领航者精确追踪参数化路径,同时,实现跟随者对领航者的精确跟踪以保持编队构型,提高系统的控制性能。
2、一种有限时间框架下的auh编队协同控制方法,其特征在于,包括:
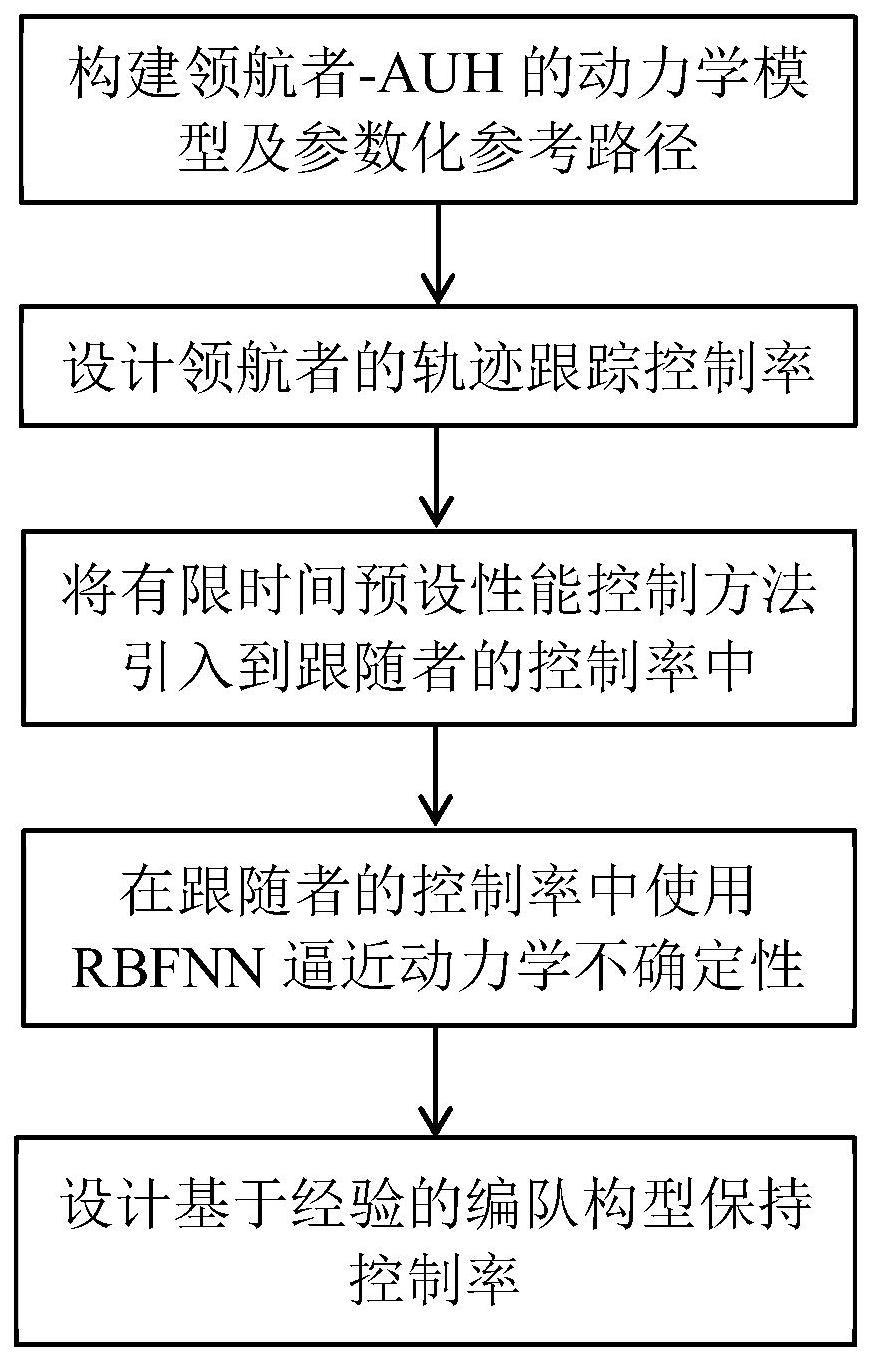
3、(1)构建领航者-auh的动力学模型及参数化参考路径;
4、(2)设计领航者的轨迹跟踪控制率时引入参数化路径,并使用有限时间状态扩张观测器估计动力学集总不确定性,保证观测误差在有限时间内收敛;
5、(3)将有限时间预设性能控制方法引入到跟随者的控制率中;
6、(4)在跟随者的控制率中使用rbfnn逼近动力学不确定性;
7、(5)设计基于经验的编队构型保持控制率,实现跟随者对领航者的精确跟踪以保持编队构型。
8、步骤(1)中,领航者-auh的动力学模型表示为:
9、
10、式中,χ0=m-1[-c(ν0)ν0-d(ν0)ν0-δ(η0,ν0)]表示集总不确定性;j(ηi)表示世界坐标系和体坐标系之间的坐标转换矩阵,c(vi)表示具有不确定性的科氏力和向心力矩阵,d(vi)表示具有不确定性的水动力阻尼矩阵,δ(ηi,νi)表示系统的未建模动力学部分,τi∈r6表示控制输入;表示在世界坐标系下的位移和航向偏角,其中,xi,yi,zi分别表示auh在世界坐标系x轴、y轴和z轴的坐标值,θi,ψi分别表示auh在世界坐标系下的翻滚角、俯仰角和偏航角;νi=[ui,υi,wi,pi,qi,ri]t表示在体坐标系下的线速度和角速度,其中,ui,υi,wi分别表示auh在体坐标系下沿x轴、y轴和z轴的速度,pi,qi,ri分别表示auh在体坐标系下的翻滚角速度、俯仰角速度和偏航角速度;m表示包含附加质量的惯性矩阵;下标i表示第i个auh智能体,其中0表示领航者-auh,1,2,...,n分别代表跟随者-auh;表示η0对时间的一阶导数,表示ν0对时间的一阶导数。
11、步骤(1)中,参数化参考路径表示为:
12、
13、式中,xro(σ),yr0(σ),zro(σ)分别表示参数化参考路径在世界坐标系x轴、y轴和z轴的参考坐标值;θr0(σ),ψr0(σ)分别表示参数化路径在世界坐标系下的参考翻滚角、俯仰角和偏航角;σ(t)为路径的参数变量。
14、步骤(2)中,有限时间状态扩张观测器设计为
15、
16、式中,函数sig( )定义为sigα(m)=sign(m)|m|α,其中为符号函数。m为观测器增益,β11∈(0,1)为调节参数,和分别表示η0、ν0和χ0的估计值,和分别表示和的一阶导数,表示η0的估计误差,计算为
17、领航者的轨迹跟踪控制率的设计过程如下:
18、领航者的跟踪误差表示为
19、z1,0=η0-ηr,0(σ)
20、其导数计算为
21、
22、式中,为理想路径参数更新率,p为外部引入的路径更新控制变量,满足关系
23、选取v0为虚拟控制量,虚拟控制率α0设计为
24、
25、式中,k1,0为正定增益对角矩阵;
26、路径参数控制变量的更新率设计为
27、
28、式中,kp>0为待设计增益;
29、误差变量z2,0计算为
30、z2,0=v0-α0
31、其一阶导数计算为
32、
33、领航者的参数化轨迹跟踪控制率设计为
34、
35、式中,k2,0为正定增益对角矩阵。
36、步骤(3)具体为:
37、将第i个auh的参考跟踪轨迹表示为
38、
39、式中,为决定编队构型的相对位置向量;
40、跟踪误差计算为
41、e1,i=ηi-ηr,i=[e1,i1,...,e1,i6]t
42、在性能预设控制框架下,误差转换关系描述为
43、e1,ij=hij(t)gij(z1,ij)
44、式中,gij为误差转换函数,z1,ij为转换误差
45、
46、hij(t)为有限时间性能函数,限制误差在有限时间收敛,有限时间性能函数设计为
47、
48、式中,t2,i为预设时间,hij(0)>1和hij(∞)v0为设计参数分别用于限制超调量和稳态误差;
49、转换误差z1,ij计算为
50、
51、步骤(4)具体为:
52、转换误差的导数计算为
53、
54、式中,z1,i=[z1,i1,...,z1,i6]t,φi=diag[ci1,...,ci6],ξi=diag[gi1,...,gi6],其中cij和gij定义如下
55、
56、选取νi为虚拟控制变量,则虚拟控制率αi设计为
57、
58、定义误差变量z2,i=νi-αi,其导数计算为
59、
60、令fi(γi)=m-1[c(vi)vi+d(vi)νi+δ(ηi,νi)]=fi1(γi),...,fi6(γi)]t为动力学集总不确定项,使用rbfnn对其逼近;
61、
62、式中,
63、跟随者的编队构型保持控制率τi设计为
64、
65、式中,是的估计值,
66、rbfnn权重系数的更新率设计为
67、
68、式中,λ1,ij>0为待设计增益矩阵,kw,ij为正常数,-λ1,ijsj(γi)z2,ij为自适应项,为协同项。
69、步骤(5)具体为:
70、rbfnn的输入为周期信号,回归子向量sp(x)是持续激活的,对动力学不确定项f(x)的精确逼近由实现
71、
72、式中,为通过学习获得的经验值
73、
74、式中,ti=inf{z1,0(t)≤ι1,e1,i(t)≤l2},表示auhs编队进入跟踪周期参考轨迹稳态阶段的时刻;
75、基于经验的编队构型保持控制率设计为
76、
77、与现有技术相比,本发明具有以下有益效果:
78、1、本发明在领航者的轨迹跟踪控制法中通过引入参数化路径,在保证精确追踪参考路径的同时,实现对跟踪速度的独立控制,进一步地,使用了有限时间状态扩张观测器估计集总不确定性并保证观测误差在有限时间内收敛。
79、2、本发明对跟随者的控制在领航者-跟随者的编队框架下实现,因此跟随者的跟踪速度控制将通过固定编队构型实现。同时,在跟随者的控制率中使用rbfnn逼近动力学不确定性,有限时间预设性能控制方法被引入到控制率中,保证误差在固定时间收敛。另外,在auhs跟踪周期参考轨线时,动力学不确定性将被使用确定性学习方法学习,学习获得的经验值将被用于搭建基于经验的协同编队控制器。
- 还没有人留言评论。精彩留言会获得点赞!