负载口独立控制的阀控液压缸系统模型控制方法及系统
本发明涉及工业过程非线性模型线性化和模型预测控制领域,具体地,涉及一种负载口独立控制的阀控液压缸系统模型控制方法及系统;更为具体地,涉及一种基于deepkoopman的面向负载口独立控制的阀控液压缸系统模型预测控制方法及系统。
背景技术:
1、阀控液压缸系统因其具备大功率、高精度、快响应等特点,广泛地应用于挖掘机、起重机、拖拉机等工程机械中。区别于传统的采用一个三位四通阀完成液压缸控制的阀控液压缸伺服控制系统,面向负载口独立控制的阀控液压缸系统具备两腔独立控制的特点,实现对液压缸工作腔以及换向阀压力控制腔的独立控制,从而使得该系统克服传统阀控液压缸系统的耦合机械结构带来的低灵活度和高能量损耗的问题,并使得系统具备更高的控制精度。
2、目前国内外针对面向负载口独立控制的阀控液压缸系统开展了一定研究。现有技术方案设计了一种回油压力连续可调的负载口独立控制系统,通过在回油路上增加一个压力可调的电比例溢流阀同时并联一个单向阀的结构,解决了控制系统低压再生模式下执行器低压腔的气穴问题以及普通模式下的压力损失。现有技术方案设计了一种基于两级供能及负载口独立阀控的液压系统和控制方法,通过模糊滑模变结构控制策略,提高液压驱动单元的控制精度和系统的效率。现有技术方案设计了一种单边控制的技能控制方法,轻载执行器两腔工作都工作在较高压力,具有提高阻尼的效果。重载执行器的流量则通过匹配的泵供油流量减去轻载执行器的流量确定。通过泵阀的联合控制,可以将系统的压力裕度尽可能降低。
3、面向负载口独立的阀控液压缸系统中液压缸的控制腔分别由两个换向阀进行独立控制,同时每个换向阀的控制腔分别由两个高速开关阀进行控制。该系统包括有多个部件,是一个“部件-整阀-阀控缸”的多级多输入伺服控制系统,且具有高度非线性。面向负载口独立控制的阀控液压缸系统的研究主要集中对系统控制精度进行控制,但是由于其非线性模型,必须解决模型控制中的非线性优化问题,这种控制器的时间成本较高,缺乏对于非线性模型线性化的研究。
4、现有的阀控液压缸系统的控制方法对于负载口独立控制的阀控液压缸系统主要通过设计系统油路结构改善系统性能,对于控制过程中的液压缸系统参数一般默认为出厂参数,缺乏对于数据驱动下模型辨识和预测方法的研究。
5、专利文献cn113653684b公开了一种回油压力连续可调的负载口独立控制系统,具体公开了,包括:液压动力源(1),用于为系统提供所需的流量;油箱(2),用于储存系统所需液压油;控制器(3),用于为系统提供控制信号;负载口独立控制阀组(4),用于改变系统液压回路,使执行器可在需求的工作模式下进行工作,包括第一比例方向阀(41)、第二比例方向阀(42),并在第一比例方向阀(41)、第二比例方向阀(42)之间的回油路上增加一个电比例溢流阀(43)同时并联一个单向阀(44),调节回油压力来避免气穴;电比例溢流阀(43)的调定回油压力根据下式进行调节:式中,为通过第二比例方向阀(42)的实际流量,为第一比例方向阀(41)和第二比例方向阀(42)的流量压力系数,为第一比例方向阀(41)和第二比例方向阀(42)之间的回油路压力,为产生气穴的压力阈值;液压执行器(5),用于将液压动力源(1)提供的能量转化为机械能,实现实际需要的操作;控制手柄(6)用于输入速度信号给控制器(3),通过控制器(3)控制第一比例方向阀(41)和第二比例方向阀(42),进而控制液压执行器(5)的动作。但该发明没有解决模型控制中的非线性优化问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种负载口独立控制的阀控液压缸系统模型控制方法及系统。
2、根据本发明提供的一种负载口独立控制的阀控液压缸系统模型控制方法,包括:
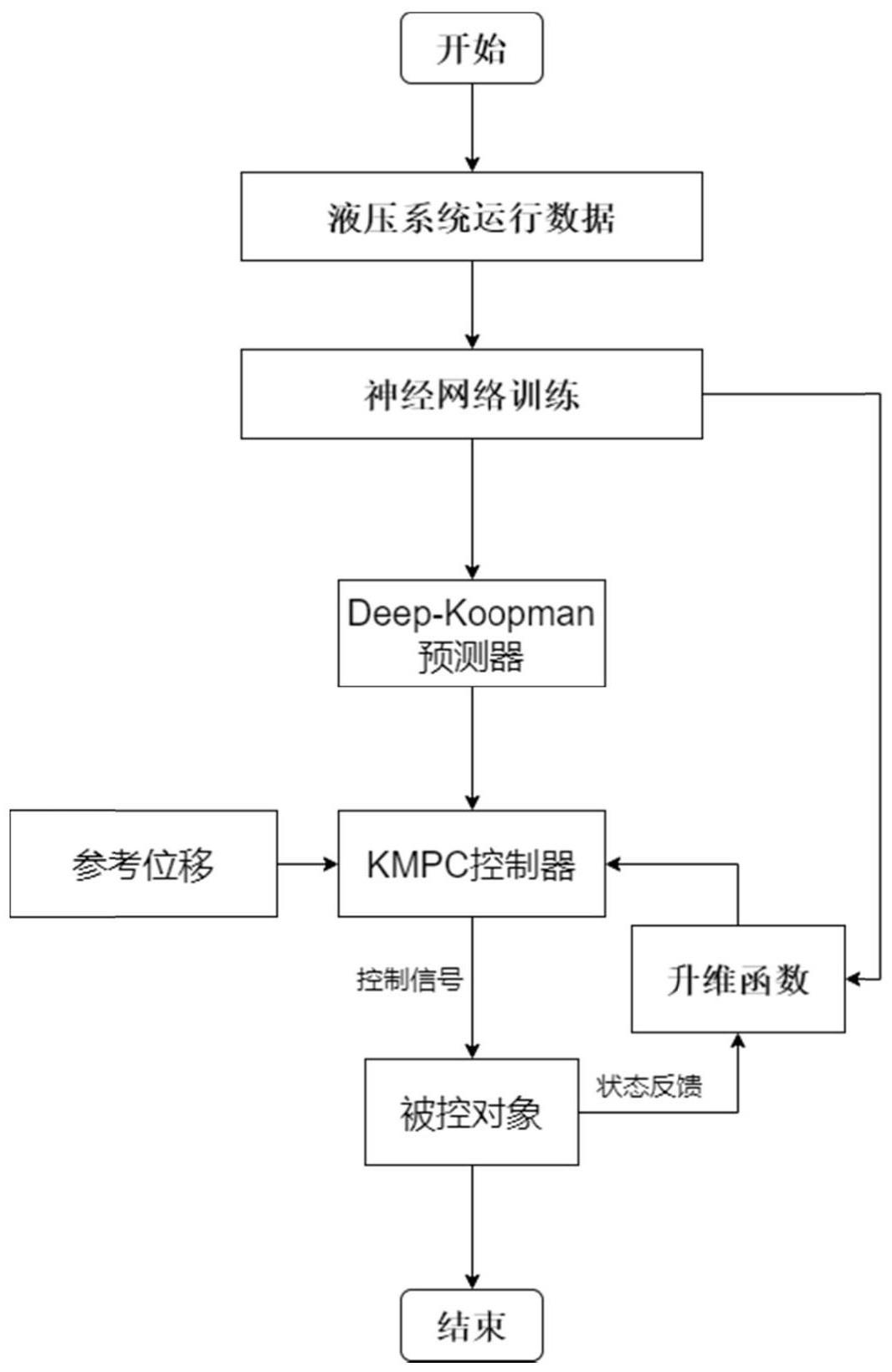
3、步骤s1:采集液压系统运行数据;
4、步骤s2:将采集到的数据划分数据集,使用神经网络训练深度koopman算子对非线性模型进行升维进行神经网络的训练,得到升维函数和高维空间预测模型;
5、步骤s3:令kmpc控制器使用训练好的高维空间预测模型进行控制量计算,输入被控对象状态参数升维后的向量和参考位移,输出用于左主阀参考位移和右主阀阀芯参考位移控制信号,循环反馈,完成液压系统位置控制。
6、优选地,负载口独立控制的阀控液压缸系统由一个数字液压先导可编程阀实现对液压缸两腔压力的独立控制;数字液压先导可编程阀的先导级由四个相同的两位三通滑阀式开关阀构成,主级由两个相同的三位三通的滑阀式液动换向阀构成;根据预设的负载运动规律,系统控制器生成控制两个主级滑阀阀芯开度的指令信号,使得负载按预设规律运动;负载口独立控制的阀控液压缸系统利用先导级高速开关阀启闭动态特性,完成对主级滑阀阀芯开度的独立控制,两个主级滑阀的阀芯开度将分别决定液压缸进出口两腔的状态;
7、控制策略采用pid-kmpc反馈结构,系统在输入参考位移下,油缸推动下的负载位移按照预设要求对参考位移进行跟踪;第一级kmpc控制器由升维函数和线性模型预测控制器组成,以油缸位移、速度和两腔压力作为反馈信号,生成用于左主阀参考位移和右主阀阀芯参考位移控制信号;第二级pid2由控制器pid2-1、pid2-2、pid2-3和pid2-4组成,分别以左阀芯位移和右阀芯位移作为反馈信号,生成用于控制四个先导阀启闭特性的控制信号。
8、优选地,在所述步骤s2中:
9、koopman算子是作用于观测函数g(x)的线性算子,函数g(xk)将低维状态变量空间xk转换为高维状态变量变量空间zk;线性算子完成g(xk)在非线性映射f下的演化;观测函数g(xk)演化为zk=g(xk,uk),其中xk为k时刻系统的状态量,uk为k时刻输入到系统的控制量;
10、zk+1=g(xk+1,uk+1)=κ(g(xk,uk),uk) (1)
11、κ为对zk到zk+1的线性变换方程,用zk+1=azk+bu表示,a和b为通过神经网络计算得到的线性矩阵,用于表示高维线性空间,zk到zk+1的线性变化;
12、koopman线性化为通过g算子将非线性系统映射到高维线性系统的方法,该线性系统的状态通过koopman算子更新;用c线性变换将zk降维成位移状态量g算子由一组koopman本征函数构成,koopman算子是一个线性算子,两个算子的组合满足从非线性模型到方程(2)表示的线性模型的转换。
13、zk+1=azk+bu (2)
14、
15、其中,c为线性高维空间中zk到系统实际状态变量的线性变化矩阵;
16、通过深度神经网络求解观测函数zk=g(xk,uk),zk∈rm,xk∈rn,uk∈r2和koopman算子;
17、其中,rm为高维线性,空间维数为m,rn为实际系统变量维数空间,r2为2维空间,因输入变量为两个;
18、第一组隐藏层复合参数记录为ofp(xk,uk),作为观测函数的一部分;第一输入层包含时间k处非线性模型的状态量和输入uk;
19、第一输出层和状态量xk是高维线性模型在时间k的状态量zk通过名为dko(zk,uk)的完全连接,获得了高维线性模型在时间k+1的状态量zk+1,观测函数表示为等式(3),其中z′k∈rm-n是第一组隐藏层的输出;线性系统表示为方程(4);
20、第一组隐藏层用于学习观测函数,内部有连接层和激活函数,zk′是完整连接层的输出;dko(zk,uk)表示deep koopman算子,是使用神经网络对升维函数g进行拟合计算得到的koopman算子,是对koopman算子的改进;dko(zk,uk)是一个无偏移的全连通层,用于学习方程(4)中的koopman运算符:
21、
22、k+1=dko(zk,uk)=azk+buk (4)
23、为了获得非线性系统状态量xk的预测,在低维非线性模型升级为高维线性模型后,需要完成降维;深度神经网络通过第三组隐藏层的降维过程,记录为drp(zk),在线性空间中的时间k处的输入zk通过隐藏层之后,获得非线性系统的状态量和输入量的重构值;系统的降维重建完成,第三组隐藏层是全连通层:
24、[xk,uk]t=drp(zk) (5)。
25、优选地,完成深度神经网络成本准则的设计,并给出深度神经网络损失函数:
26、衡量预测准确性损失函数loss1:
27、loss1=‖(xk+1,uk+1)-drp(dko(zk,uk))‖ (6)
28、衡量重建有效性的损失函数loss2:
29、loss2=‖(xk,uk)-drp(zk)‖ (7)
30、用于测量系统线性度的损失函数loss3:
31、
32、优选地,在所述步骤s3中:
33、基于神经网络的计算结果,建立kmpc控制器。
34、控制器求解过程由方程(9)和(10)表示。
35、
36、s.t.zk+1=azk+buk,k=0,…,n (9)
37、yk=zk
38、z0=(x0)
39、
40、其中,j是成本函数,q,r是权重参数,n为预测时域,yk为系统预测状态,yr为系统参考状态,uk为系统控制量,代价函数分为两部分,一部分为与参考状态量的偏差代价,另一部分为控制量代价;求解优化问题得到代价最小的控制量uk,令为系统预测位移,x0为求解时系统的状态,xk为预测器给出的的之后第k步的系统预测状态;j是以uk为变量的目标优化函数,求出使得j在约束条件下成本最下的uk,作为下一步的系统控制量输入。
41、根据本发明提供的一种负载口独立控制的阀控液压缸系统模型控制系统,包括:
42、模块m1:采集液压系统运行数据;
43、模块m2:将采集到的数据划分数据集,使用神经网络训练深度koopman算子对非线性模型进行升维进行神经网络的训练,得到升维函数和高维空间预测模型;
44、模块m3:令kmpc控制器使用训练好的高维空间预测模型进行控制量计算,输入被控对象状态参数升维后的向量和参考位移,输出用于左主阀参考位移和右主阀阀芯参考位移控制信号,循环反馈,完成液压系统位置控制。
45、优选地,负载口独立控制的阀控液压缸系统由一个数字液压先导可编程阀实现对液压缸两腔压力的独立控制;数字液压先导可编程阀的先导级由四个相同的两位三通滑阀式开关阀构成,主级由两个相同的三位三通的滑阀式液动换向阀构成;根据预设的负载运动规律,系统控制器生成控制两个主级滑阀阀芯开度的指令信号,使得负载按预设规律运动;负载口独立控制的阀控液压缸系统利用先导级高速开关阀启闭动态特性,完成对主级滑阀阀芯开度的独立控制,两个主级滑阀的阀芯开度将分别决定液压缸进出口两腔的状态;
46、控制策略采用pid-kmpc反馈结构,系统在输入参考位移下,油缸推动下的负载位移按照预设要求对参考位移进行跟踪;第一级kmpc控制器由升维函数和线性模型预测控制器组成,以油缸位移、速度和两腔压力作为反馈信号,生成用于左主阀参考位移和右主阀阀芯参考位移控制信号;第二级pid2由控制器pid2-1、pid2-2、pid2-3和pid2-4组成,分别以左阀芯位移和右阀芯位移作为反馈信号,生成用于控制四个先导阀启闭特性的控制信号。
47、优选地,在所述模块m2中:
48、koopman算子是作用于观测函数g(x)的线性算子,函数g(xk)将低维状态变量空间xk转换为高维状态变量变量空间zk;线性算子完成g(xk)在非线性映射f下的演化;观测函数g(xk)演化为zk=g(xk,uk),其中xk为k时刻系统的状态量,uk为k时刻输入到系统的控制量;
49、zk+1=g(xk+1,uk+1)=κ(g(xk,uk),uk) (1)
50、κ为对zk到zk+1的线性变换方程,用zk+1=azk+bu表示,a和b为通过神经网络计算得到的线性矩阵,用于表示高维线性空间,zk到zk+1的线性变化;
51、koopman线性化为通过g算子将非线性系统映射到高维线性系统的方法,该线性系统的状态通过koopman算子更新;用c线性变换将zk降维成位移状态量g算子由一组koopman本征函数构成,koopman算子是一个线性算子,两个算子的组合满足从非线性模型到方程(2)表示的线性模型的转换。
52、zk+1=azk+bu (2)
53、
54、其中,c为线性高维空间中zk到系统实际状态变量的线性变化矩阵;
55、通过深度神经网络求解观测函数zk=g(xk,uk),zk∈rm,xk∈rn,uk∈r2和koopman算子;
56、其中,rm为高维线性,空间维数为m,rn为实际系统变量维数空间,r2为2维空间,因输入变量为两个;
57、第一组隐藏层复合参数记录为ofp(xk,uk),作为观测函数的一部分;第一输入层包含时间k处非线性模型的状态量和输入uk;
58、第一输出层和状态量xk是高维线性模型在时间k的状态量zk通过名为dko(zk,uk)的完全连接,获得了高维线性模型在时间k+1的状态量zk+1,观测函数表示为等式(3),其中z′k∈rm-n是第一组隐藏层的输出;线性系统表示为方程(4);
59、第一组隐藏层用于学习观测函数,内部有连接层和激活函数,zk′是完整连接层的输出;dko(zk,uk)表示deep koopman算子,是使用神经网络对升维函数g进行拟合计算得到的koopman算子,是对koopman算子的改进;dko(zk,uk)是一个无偏移的全连通层,用于学习方程(4)中的koopman运算符:
60、
61、zk+1=dko(zk,uk)=azk+buk (4)
62、为了获得非线性系统状态量xk的预测,在低维非线性模型升级为高维线性模型后,需要完成降维;深度神经网络通过第三组隐藏层的降维过程,记录为drp(zk),在线性空间中的时间k处的输入zk通过隐藏层之后,获得非线性系统的状态量和输入量的重构值;系统的降维重建完成,第三组隐藏层是全连通层:
63、[xk,uk]t=drp(zk) (5)。
64、优选地,完成深度神经网络成本准则的设计,并给出深度神经网络损失函数:
65、衡量预测准确性损失函数loss1:
66、loss1=‖(xk+1,uk+1)-drp(dko(zk,uk))‖ (6)
67、衡量重建有效性的损失函数loss2:
68、loss2=‖(xk,uk)-drp(zk)‖ (7)
69、用于测量系统线性度的损失函数loss3:
70、
71、
72、优选地,在所述模块m3中:
73、基于神经网络的计算结果,建立kmpc控制器。
74、控制器求解过程由方程(9)和(10)表示。
75、
76、s.t.zk+1=azk+buk,k=0,…,n (9)
77、yk=czk
78、z0=g(x0)
79、
80、其中,j是成本函数,q,r是权重参数,n为预测时域,yk为系统预测状态,yr为系统参考状态,uk为系统控制量,代价函数分为两部分,一部分为与参考状态量的偏差代价,另一部分为控制量代价;求解优化问题得到代价最小的控制量uk,令为系统预测位移,x0为求解时系统的状态,xk为预测器给出的的之后第k步的系统预测状态;j是以uk为变量的目标优化函数,求出使得j在约束条件下成本最下的uk,作为下一步的系统控制量输入。
81、与现有技术相比,本发明具有如下的有益效果:
82、1、本发明针对面向负载口独立控制的阀控液压缸系统,提出了一种数据驱动的模型预测方法,通过使用神经网络训练深度koopman算子对非线性模型进行升维,得到了高维空间的线性预测模型;
83、2、本发明设计了一种基于深度koopman的模型预测控制方法,引入升维函数将非线性模型与线性模型预测控制器相结合,实现了负载口独立控制阀控液压缸系统的快速模型预测控制,完成了负载口独立控制的阀控液压缸系统运动控制。
- 还没有人留言评论。精彩留言会获得点赞!