火炮随动系统的全局反步自适应滑模控制器、设计方法、电子设备和可读存储介质
本发明属于自动控制领域,涉及一种火炮随动系统的全局反步自适应滑模控制器及控制器的设计方法。
背景技术:
1、在火炮随动系统中,齿隙是其机械传动装置最主要的非线性环节,也是对系统性能影响最大的非线性因素。齿隙具有动态、不可微和非平滑等非线性性质,会引起传动力矩、负载转速在换向时的抖振,降低系统的位置跟踪精度和稳定性。因此,研究火炮随动系统中的非线性齿隙补偿方法具有重要的理论意义与工程实践价值。齿隙补偿的技术途径主要分为机械技术与控制技术。前者通常采用多电机同步联动法,它虽能消除传动力矩、负载转速在齿隙期间的不可控性,但新增驱动装置不仅对机械结构提出较高的要求,而且使系统更为复杂;后者主要运用控制方法来补偿非线性齿隙,近年来,反步控制、自适应控制、滑模控制、模糊控制等现代控制方法在齿隙补偿方面已取得快速发展。其中,反步控制将复杂的高阶系统划分为低阶子系统,通过递推逐步构造lyapunov函数,实现跟踪误差快速收敛,是处理高阶非线性随动系统强有力的工具;较一般系统,火炮随动系统具有负载惯量大,传动轴易产生扭转变形的特点,加剧了齿隙的影响,结合滑模控制可削弱传动力矩、负载转速在换向时的抖振;系统运行时,传动输出轴的等效刚度、摩擦系数在短时内可视为常量参数,由于受温度、受力、材料性能等因素的影响,不易进行精确测量,现有技术以这这类参数通常以常量计算,导致系统测量误差大,进而影响系统性能,降低齿隙补偿效果的齿隙补偿效果。
技术实现思路
1、为了解决削弱传动力矩、负载转速在换向时的抖振,且系统中存在不确定参数时能够弥补测量误差的问题,本发明结合自适应控制逼近系统中的短时内可视为常量参数,由于受温度、受力、材料性能等因素的影响,不易进行精确测量的不确定参数,从而弥补测量误差对系统性能的影响,进而提升齿隙补偿效果。
2、在第一方面上,根据本技术一些实施例的火炮随动系统的全局反步自适应滑模控制器,所述控制器的控制量表示为:
3、
4、所述控制器的不确定参数传动输出轴的等效刚度k的自适应律
5、
6、所述控制器的不确定参数传动输出轴的摩擦系数c的自适应律
7、
8、其中
9、
10、其中:n表示减速齿轮的传动比,表示不确定参数传动输出轴的摩擦系数c的估计值,其中jl表示从动轮转动惯量,kv表示速度调节器为比例系数,kpwm表示,kt表示电机力矩系数,jm表示主动轮转动惯量,r表示电枢回路电阻,r表示近似非线性齿隙的模型函逼近数非线性齿隙的模型函数的逼近程度,j表示齿隙的一半,z=θm/n-θl,θm表示主动轮转角,θl表示从动轮转角;
11、e1=x1d-x1,e2=x2d-x2,xid表示系统虚拟控制量xi的期望值,s=c1e1+c2e2+e3,其中e3=x3d-a1x3;ci>0,i=1,2表示控制器的设计参数,x1=θl,fi>0,i=1,2,3,4表示控制器的设计参数,mr表示当前海况射击时等效在电机端的外界非线性干扰;
12、cmin表示不确定参数传动输出轴的最小摩擦系数,cmax表示不确定参数传动输出轴的最大摩擦系数,kmin表示不确定参数传动输出轴的最小等效刚度,kmax表示不确定参数传动输出轴的最大等效刚度,δk表示不确定参数传动输出轴的等效刚度k的期望值与实际值的差值,δc表示不确定参数传动输出轴的摩擦系数c的期望值与实际值的差值,γi>0,i=1,2为控制器的设计参数;
13、
14、其中bl表示从动轮摩擦系数,k表示不确定参数传动输出轴的等效刚度,表示不确定参数传动输出轴的等效刚度的估计值,c表示不确定参数传动输出轴的摩擦系数,其中kvf表示速度环反馈系数,ke为电机反电势系数。
15、在第二方面上,根据本技术一些实施例的所述的火炮随动系统的全局反步自适应滑模控制器的设计方法,包括如下步骤:
16、将含齿隙双惯量模型的火炮随动系统通过反步控制将所述火炮随动系统分解为三个一阶子系统;
17、根据所述一阶子系统,使用滑模控制确定所述控制器的不确定参数传动输出轴的等效刚度k、所述控制器的不确定参数传动输出轴的摩擦系数c的自适应律。
18、根据本技术一些实施例的所述的火炮随动系统的全局反步自适应滑模控制器的设计方法,含齿隙双惯量模型的火炮随动系统,其系统的状态变量为
19、
20、其中:θl表示从动轮转角,表示从动轮角速度,z=θm/n-θl,θm表示主动轮转角,r表示近似非线性齿隙的模型函逼近数非线性齿隙的模型函数的逼近程度,j表示齿隙的一半;
21、构建系统的状态方程为
22、
23、其中:bl表示从动轮摩擦系数,jl表示从动轮转动惯量,jm表示主动轮转动惯量,bm表示主动轮摩擦系数,kvf表示速度环反馈系数,kv表示速度调节器为比例系数,kpwm表示,kt表示电机力矩系数,ke为电机反电势系数,r表示电枢回路电阻,t=kx3+cx4,k表示控制器的不确定参数传动输出轴的等效刚度、c表示控制器的不确定参数传动输出轴的摩擦系数;
24、根据本技术一些实施例的所述的火炮随动系统的全局反步自适应滑模控制器的设计方法,所述步骤根据所述一阶子系统,使用滑模控制确定所述控制器的不确定参数传动输出轴的等效刚度k、所述控制器的不确定参数传动输出轴的摩擦系数c的自适应律的方法,包括
25、定义系统位置误差变量
26、e1=x1d-x1 (5)
27、其中,xid,i=1,2,3为系统虚拟控制量xi的期望值;
28、对式(5)表示的所述系统位置误差变量求导得
29、
30、对式(6)构造lyapunov函数,得到第一个子系统
31、
32、对式(7)表示的所述第一个子系统求导得
33、
34、虚拟控制量的期望值表示为
35、
36、定义系统速度误差变量
37、e2=x2d-x2 (10)
38、将式(9)表示的所述虚拟控制量的期望值代入式(8)中得
39、
40、其中,fi>0,i=1,2,3,4表示控制器的设计参数;
41、将式(9)表示的所述虚拟控制量的期望值代入式(10)中得
42、
43、对式(12)表示的所述系统速度误差变量求导得
44、
45、由于所述控制器的不确定参数传动输出轴的等效刚度k、所述控制器的不确定参数传动输出轴的摩擦系数c不确定,令表示不确定参数传动输出轴的等效刚度k的估计值、表示不确定参数传动输出轴的摩擦系数c的估计值,定义变量β及其估计值为
46、
47、将式(14)表示的变量β及其估计值代入式(13)中得
48、
49、对式(15)构造lyapunov函数,得到第二个子系统
50、
51、其中,γi>0,i=1,2为控制器的设计参数,δk表示不确定参数传动输出轴的等效刚度k的期望值与实际值的差值,δc表示不确定参数传动输出轴的摩擦系数c的期望值与实际值的差值;
52、定义子系统误差变量
53、e3=x3d-a1x3 (17)
54、对式(16)表示的所述子系统误差变量求导得
55、
56、取虚拟控制量的期望值
57、
58、将式(19)表示的所述虚拟控制量的期望值代入式(18)中得
59、
60、当不确定参数传动输出轴的等效刚度k的估计值不确定参数传动输出轴的摩擦系数c的估计值分别收敛于不确定参数传动输出轴的等效刚度k、不确定参数传动输出轴的摩擦系数c,且a1x3等于a1x3期望值x3d时,则有δk=0、δc=0、e3=0,保证负定,使e1、e2能够渐进稳定趋于零;
61、将式(19)表示的虚拟控制量的期望值代入式(17)中求导得
62、
63、式(21)中,各参数取值为
64、
65、定义滑模控制的滑动流形为
66、s=c1e1+c2e2+e3 (23)
67、对式(23)表示的滑模控制的滑动流形求导得
68、
69、其中,ci>0,i=1,2表示控制器的设计参数
70、当状态变量在滑模上滑动时s=0,则成立,使式(24)为hurwitz的常数;
71、构造系统lyapunov函数,获取第三子系统
72、
73、对式(25)表示的第三子系统求导,并将式(20)、(21)、(24)代入得
74、
75、根据所述式(26)得控制器的输出为
76、
77、将式(27)表示的所述控制器的输出代入式(26)中得
78、
79、所述控制器的不确定参数传动输出轴的等效刚度k、所述控制器的不确定参数传动输出轴的摩擦系数c的自适应律为
80、
81、考虑不确定参数传动输出轴的等效刚度k的估计值不确定参数传动输出轴的摩擦系数c的估计值存在上下界,调整自适应律。
82、
83、
84、联立式(28)~(31)得
85、
86、式(32)中:
87、
88、本技术实施例还提供一种电子设备,所述电子设备包括:一个或多个处理器,存储器,以及,一个或多个程序;其中,所述一个或多个程序被存储在所述存储器中,所述一个或多个程序包括指令,当所述指令被所述电子设备执行时,使得所述电子设备执行本技术实施例第二方面及其第二方面任一可能设计的技术方案。
89、本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质包括计算机程序,当计算机程序在电子设备上运行时,使得所述电子设备执行本技术实施例第二方面及其第二方面任一可能设计的技术方案。
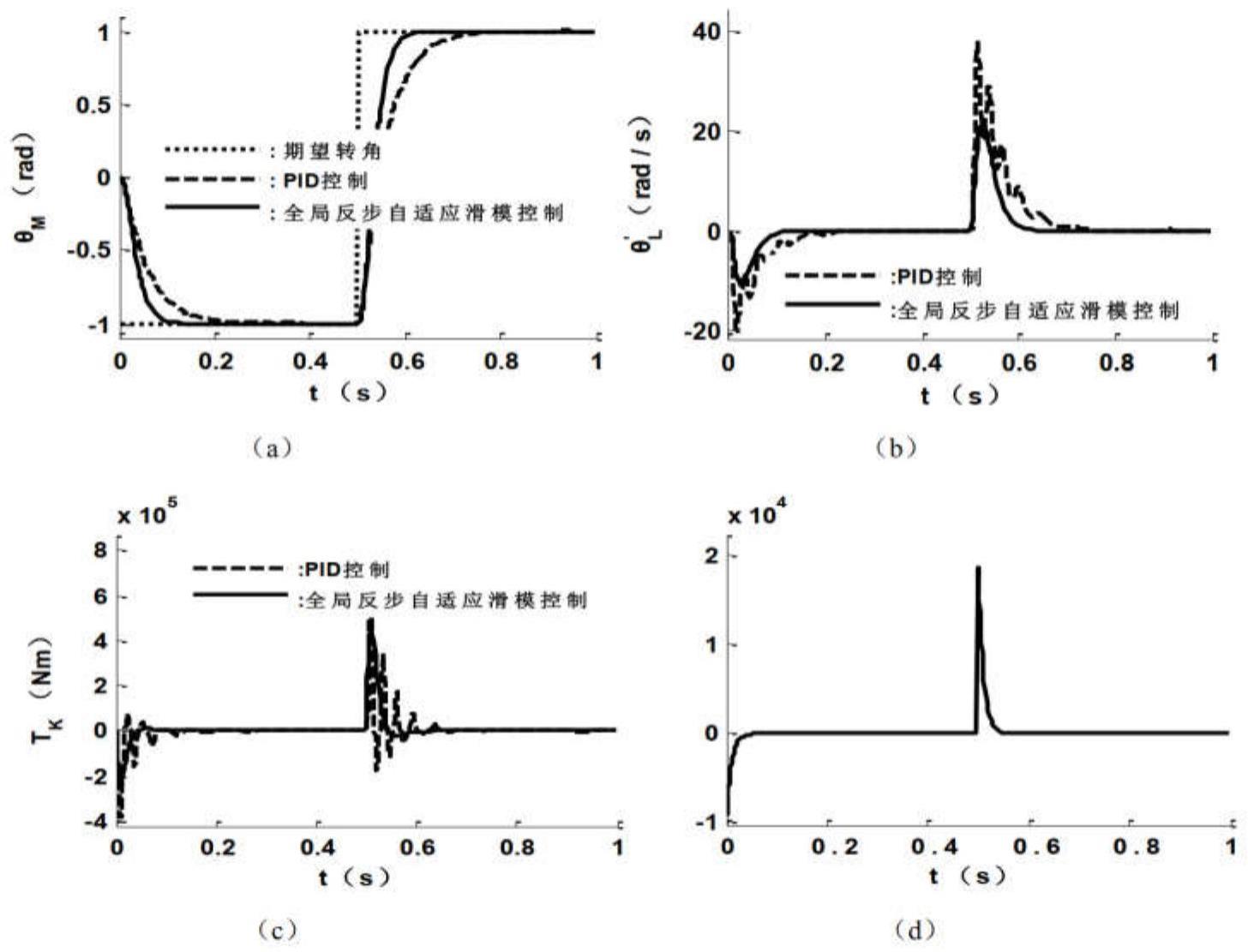
90、本发明的有益效果:在一个方面上,本发明对火炮随动系统具有负载惯量大,传动轴易产生扭转变形,从而加剧齿隙影响的特点,应用滑模控制,能够削弱传动力矩、负载转速在换向时的抖振。在另一方面上,本发明应用自适应控制逼近系统中的短时内可视为常量参数,由于受温度、受力、材料性能等因素的影响,不易进行精确测量的不确定参数,从而弥补测量误差对系统性能的影响,进而提升齿隙补偿效果。在第三方面上,本发明控制器能使随动系统响应速度更快、更高精度地跟踪大角度调转期望位置信号,系统具有良好的位置跟踪性能及鲁棒性,在第四方面上,本发明控制器在短时间内能将随动系统的位置误差收敛至小范围内,使系统快速、高精度地跟踪正弦期望位置信号,具有良好的动态品质及鲁棒性。
91、上述效果在本发明具体实施方式的仿真实验分析部分所表明。上述各个方面可能达到的技术效果请参照上述针对第一方面可以达到的技术效果说明,这里不再重复赘述。本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!