智能网联车辆队列控制实验系统
本发明涉及智能网联汽车,具体为智能网联车辆队列控制实验系统。
背景技术:
1、智能网联车辆和车辆队列系统具有超视距感知和群体自治能力,能让车与车之间高效的、紧凑的协同运行,是提高通行效率、减少能量消耗、增强行车安全的有效手段,未来交通运输重要场景之一是网联自驾车辆以队列形式在道路上行驶。环境感知、通信、智能控制是车辆队列系统的三大核心功能块。通过智能车辆队列控制实验系统对感知-通信-控制算法进行验证,能够极大提高车辆队列控制系统算法的开发效率。如授权公告号为cn113808438b的发明专利“基于神经网络的车辆队列控制模式切换系统及切换方法”通过神经网络处理产生的数据信息,更接近前方车辆的真实轨迹信息,并在从cacc控制器方式切换到acc控制器方式时,使得每一辆车只接受前方一辆车的数据信息,从而提高预测数据的准确性。又如授权公告号为cn112445229b的发明专利“一种领航车队协同的单车道多队列分层控制方法”构建了单车道多队列系统,并划分为由领航车构成的领航车层和由跟随车构成的子队列层,建立单车道多队列分布式模型预测控制器,利用预测控制器,计算当前时刻自车的最优预测控制输入序列实现自车控制,实现单车道多队列系统的稳定性跟随控制。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了智能网联车辆队列控制实验系统。
3、(二)技术方案
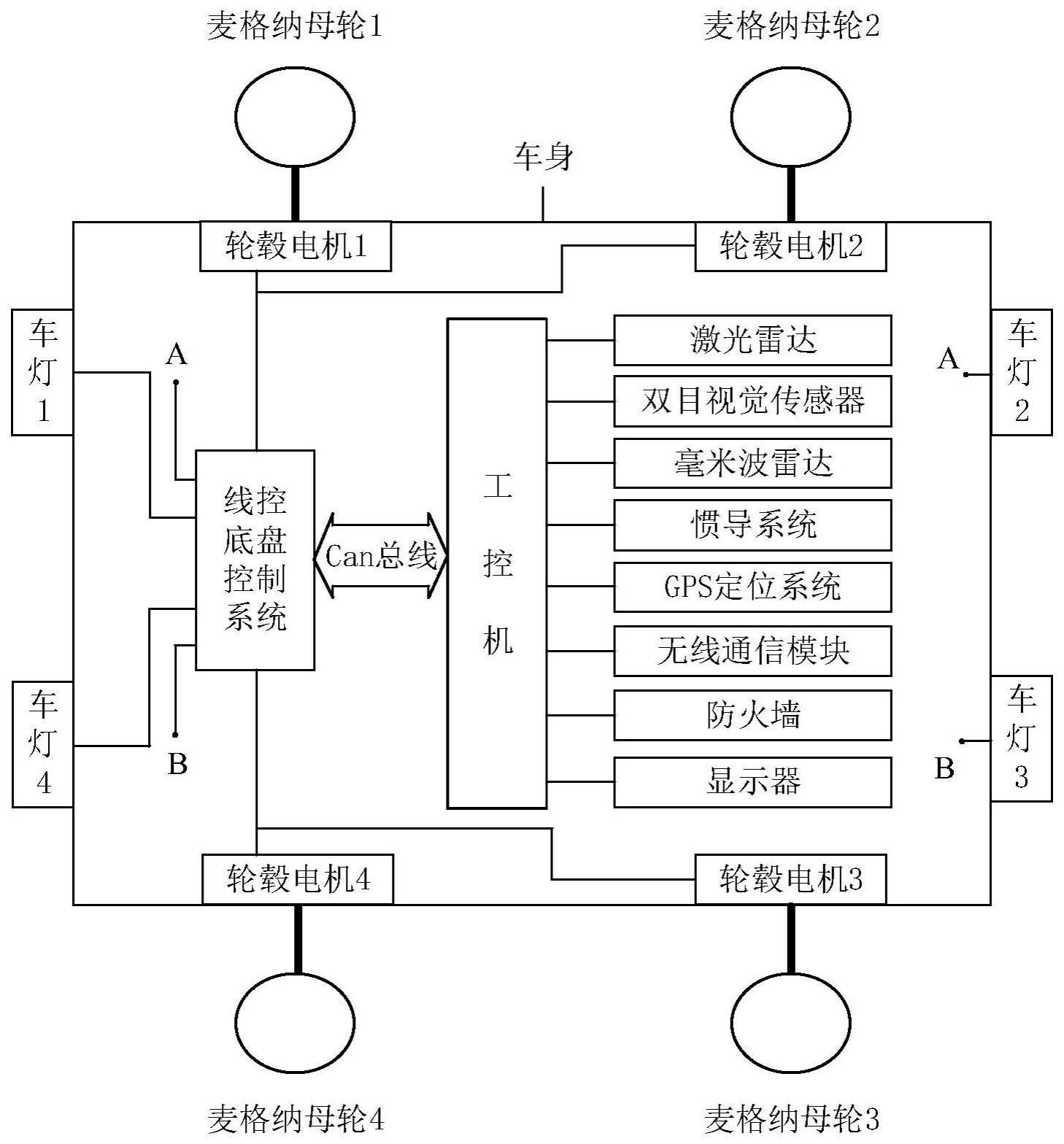
4、为实现上述能够完成车辆队列的跟随、超车、换道、刹车等系列实验,验证智能车辆队列控制算法,为智能网联车辆队列系统上路行驶及产业化应用奠定基础的目的,本发明提供如下技术方案:智能网联车辆队列控制实验系统,包括6个模块,具体为线控底盘模块、工控机模块、感知模块、导航模块、通信模块和显示模块,线控底盘模块由线控底盘控制系统、轮毂电机、麦格纳母轮1-4、车灯1-4、车身5个部分构成;工控机模块由一台车载工控机构成;感知模块由激光雷达、双目视觉传感器、毫米波雷达构成;导航模块由gps导航系统、imu惯导系统构成;通信模块由无线通信网卡和工业路由器构成;显示模块是一块lcd液晶显示屏。
5、优选的,系统共包含n辆车(n为正整数,n<100),其中包含1辆领航车量,和n-1辆跟随车辆,领航车和跟随车的结构相同。
6、优选的,智能网联车辆队列控制实验系统可工作在两种模式下,分别是单车模式和队列模式。
7、优选的,单车模式工作过程如下:车辆行驶过程中通过激光雷达、双目视觉传感器、毫米波雷达感知周围环境,并通过gps导航系统和imu惯导系统确定自车位置、姿态;将环境感知信号输入到工控机进行数据融合,根据融合结果进行智慧决策、路径规划,然后将控制信号通过can总线传输至线控底盘控制系统。线控底盘控制系统控制轮毂电机和车灯系统工作,实现智能车辆系统稳定运行,显示屏实时显示自车状态和环境感知结果。
8、优选的,队列模式可开展车辆跟随实验、超车实验、外部车辆驶入车辆队列实验等,车辆队列跟随实验场景:领航车在公路上行驶,n量跟随车以较小的车间距依次跟随在领航车后面;
9、领航车的速度、刹车、位置、方向盘转角等信息通过无线通信模块实时传递给跟随车,跟随车接受到领航车的信号后,首先通过防火墙进行信号识别,防止网络攻击,造成恶性交通事故;
10、当领航车速度降低或者实施制动后,相应控制信号实时传递给n量跟随车,跟随车及时采取缓速或制动,防止追尾。
11、优选的,车辆队列超车实验场景为:领航车在车道1行驶,当遇到前方有行驶缓慢的车辆a和车辆b时,车辆队列有超车意图;
12、超车的工作流程步骤如下:
13、第一步:领航车计算与车辆b的距离,并实时检测车道2是否有其他车辆出现;
14、第二步:判断是否具备超车条件;
15、第三步:如果具备超车条件,领航车通过控制速度、方向盘转角,从车道1驶入车道2,并将上述控制信息通过无线通信模块同步给跟随车;如果不具备超车条件,领航车继续在原车道行驶,等待合适的超车时机;
16、第四步:领航车超车完成后,第1辆跟随车根据领航车同步的控制信息,同时结合自车环境感知结果,判断是否具备超车条件,如果具备则实施超车,如果不具备则等待时机,直到完成超车;
17、第五步:第2辆跟随车、第3辆跟随车、直至第n辆跟随车完成超车。
18、优选的,外部车辆驶入车辆队列实验场景为:领航车在车道1行驶,跟随车依次跟在领航车后面稳定行进,但是在第i辆跟随车和第i+1辆跟随车之间,有一辆外部车辆,系统受到外部车辆扰动,对车辆队列系统安全稳定行驶造成不良影响,系统将通过系列方法使其恢复稳定。
19、优选的,车辆队列系统工作流程步骤如下:
20、第一步:第i辆车通过显示屏显示“您已驶入车辆队列系统,希望能尽快驶出”进行友情提示,如果外部车辆驶离,则第i+1量车通过加速减小与第i量车的距离,后续车辆依次跟上;如果外部车辆没有驶离,转至第二步;
21、第二步:第i+1量车将信息传输至领航车,领航车减缓车速,后续第1量跟随车至第i量跟随车,同步减速,此时外部车辆一般会驶出车辆队列;
22、第三步:车辆队列系统恢复稳定。
23、(三)有益效果
24、与现有技术相比,本发明提供了智能网联车辆队列控制实验系统,具备以下有益效果:
25、1、该智能网联车辆队列控制实验系统,首先设计了单车系统,将多辆单车联网,可实现队列运行。系统既可工作于单车模式下,又可工作于队列模式下。单车模式下车辆通过环境感知设备检测周围传感器,然后进行智能决策和路径规划,实现无人驾驶。
26、2、该智能网联车辆队列控制实验系统,队列模式下,领航车通过无线网络与跟随车进行通信,能够完成车辆队列跟随、超车、队列稳定性控制等实验,可控制算法进行实验验证,提升车辆队列系统开发效率,对促进智能网联车队列系统产业化应用具有显著意义。
技术特征:
1.智能网联车辆队列控制实验系统,包括6个模块,其特征在于:具体为线控底盘模块、工控机模块、感知模块、导航模块、通信模块和显示模块,线控底盘模块由线控底盘控制系统、轮毂电机、麦格纳母轮1-4、车灯1-4、车身5个部分构成;工控机模块由一台车载工控机构成;感知模块由激光雷达、双目视觉传感器、毫米波雷达构成;导航模块由gps导航系统、imu惯导系统构成;通信模块由无线通信网卡和工业路由器构成;显示模块是一块lcd液晶显示屏。
2.根据权利要求1所述的智能网联车辆队列控制实验系统,其特征在于:系统共包含n辆车,其中包含1辆领航车量,和n-1辆跟随车辆,领航车和跟随车的结构相同。
3.根据权利要求1所述的智能网联车辆队列控制实验系统,其特征在于:智能网联车辆队列控制实验系统可工作在两种模式下,分别是单车模式和队列模式。
4.根据权利要求3所述的智能网联车辆队列控制实验系统,其特征在于:所述单车模式工作过程如下:车辆行驶过程中通过激光雷达、双目视觉传感器、毫米波雷达感知周围环境,并通过gps导航系统和imu惯导系统确定自车位置、姿态;将环境感知信号输入到工控机进行数据融合,根据融合结果进行智慧决策、路径规划,然后将控制信号通过can总线传输至线控底盘控制系统,线控底盘控制系统控制轮毂电机和车灯系统工作,实现智能车辆系统稳定运行,显示屏实时显示自车状态和环境感知结果。
5.根据权利要求1所述的智能网联车辆队列控制实验系统,其特征在于:所述队列模式可开展车辆跟随实验、超车实验、外部车辆驶入车辆队列实验等,车辆队列跟随实验场景:领航车在公路上行驶,n量跟随车以较小的车间距依次跟随在领航车后面;
6.根据权利要求5所述的智能网联车辆队列控制实验系统,其特征在于:所述车辆队列超车实验场景为:领航车在车道1行驶,当遇到前方有行驶缓慢的车辆a和车辆b时,车辆队列有超车意图;
7.根据权利要求5所述的智能网联车辆队列控制实验系统,其特征在于:所述外部车辆驶入车辆队列实验场景为:领航车在车道1行驶,跟随车依次跟在领航车后面稳定行进,但是在第i辆跟随车和第i+1辆跟随车之间,有一辆外部车辆,系统受到外部车辆扰动,对车辆队列系统安全稳定行驶造成不良影响,系统将通过系列方法使其恢复稳定。
8.根据权利要求5所述的智能网联车辆队列控制实验系统,其特征在于:所述车辆队列系统工作流程步骤如下:
技术总结
本发明涉及智能网联汽车技术领域,且公开了智能网联车辆队列控制实验系统,包括6个模块,具体为线控底盘模块、工控机模块、感知模块、导航模块、通信模块和显示模块,线控底盘模块由线控底盘控制系统、轮毂电机、麦格纳母轮1‑4、车灯1‑4、车身5个部分构成;工控机模块由一台车载工控机构成;感知模块由激光雷达、双目视觉传感器、毫米波雷达构成;导航模块由GPS导航系统、IMU惯导系统构成;通信模块由无线通信网卡和工业路由器构成;显示模块是一块LCD液晶显示屏,首先设计了单车系统,将多辆单车联网,可实现队列运行。单车模式下车辆通过环境感知设备检测周围传感器,然后进行智能决策和路径规划,实现无人驾驶。
技术研发人员:温国强,关志伟,赵俊英,郭肖鹏,常文爽,杨芳,白雪,段婷婷,胡顺堂
受保护的技术使用者:天津中德应用技术大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!