一种玉米作物多模态数据采集平台车及其控制方法
本发明涉及农业数据采集。
背景技术:
1、玉米是我国的三大主粮之一,在农业生产中具有十分重要的价值,但是在玉米生长过程中,经常由于选种、气候以及管理等因素导致病虫害的发生,近年来随着玉米种植面积的扩大,由玉米病虫害造成的损失也在逐年上升,因此及时的了解玉米病虫害的情况对提高玉米作物产量具有重要意义。
2、传统的病虫害检测需要农业生产者或者专家到田间实地进行观察,这需要检测人员具有丰富的经验以及专业知识,检测结果受检测者的主观意识较大,检测标准不唯一,并且检测过程劳动强度大,成本高,无法同时开展大范围的检测;其次常用的检测方法包含生物学检测、电子显微镜检测、免疫学检测和分子生物学检测,以上检测方法准确度高但是不适合于在现场操作,并且检测速度慢,成本高,不利于大范围推广。
3、随着科技的发展,病虫害检测开始向智能化发展,利用机器视觉技术、光谱技术、光谱成像技术进行农作物病虫害检测已经成为农作物病虫害检测的发展方向。利用机器视觉技术对农作物病虫害图像进行分析,可以得到农作物颜色、纹理、形状等病虫害特征,再结合分类算法,对得到的特征进行统计分析可以实现农作物病虫害的检测;光谱技术检测原理是病虫害作物叶片相比于健康叶片的光谱特征波长会发生变化,结合全波段分析、敏感波段分析、波段比分析建立判别分析模型可以实现病虫害的检测;光谱成像技术可以利用光谱技术有效提取病虫害特征波段,同时利用图像处理技术提取图像特征,结合两种检测方法的优点,其可以提供更加准确的检测病虫害的方法。
4、因此,搭建农作物数据采集平台利用传感器采集农作物数据并进行分析可以实现对作物病虫害的检测,并且可以用于估计产量、检测生长状态等。
5、目前玉米多模态数据采集平台主要分为基于地面的和非地面的,其中基于地面的数据采集平台可分为固定式和移动式两种,固定式平台重复性强,但其费用昂贵,覆盖的玉米植株数量少,移动式平台多为农业机械平台,其体积较大,受农田地形限制大;非地面的数据采集平台包括无人机、机载平台等,其可获得大范围的作物数据,上述两类平台由于运动方式以及平台安装的限制只能从玉米上方采集数据,即玉米植株中上部分数据,无法获取到玉米中下部分以及茎部的数据信息。
6、因此,如何提供一种从底部采集玉米作物数据的玉米采集平台,成为本领域亟待解决的技术问题。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种玉米作物多模态数据采集平台车及其控制方法,该平台车及控制方法采用在底面行进的平台车从底部采集玉米作物数据,弥补了现有平台无法采集玉米中下部分数据的不足,且整个采集过程中无需人员操作即可自动完成,自动化程度更高。
2、基于同一发明构思,本发明具有两个独立的技术方案:
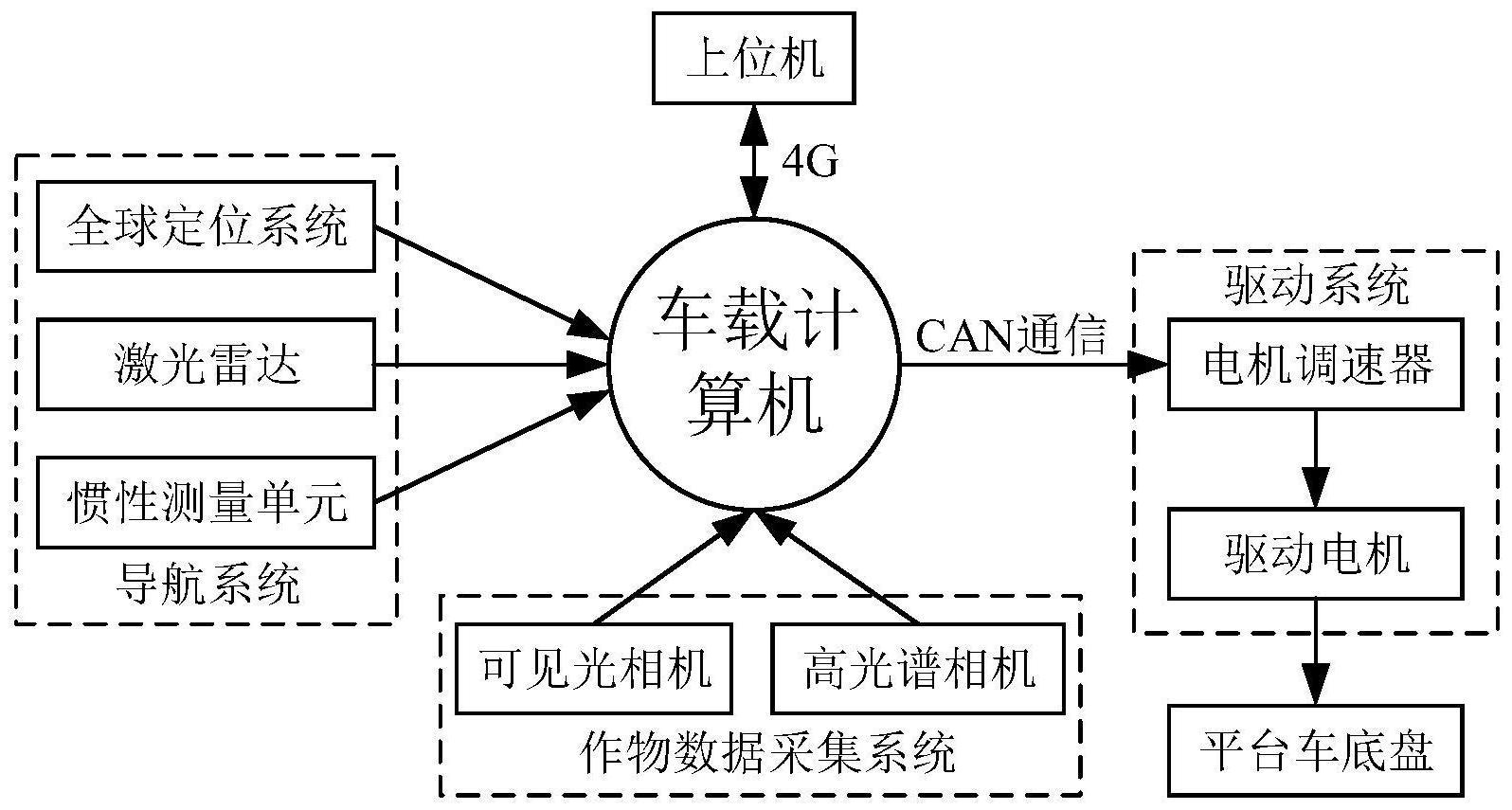
3、1、一种玉米作物多模态数据采集平台车,其特征在于,包括履带式底盘,安装于所述履带式底盘上方的导航模块和控制模块,所述控制模块设置于所述导航模块后方;还包括与所述履带式底盘连接的驱动模块,以及设置于所述控制模块上方的数据采集模块;
4、其中,所述导航模块包括激光雷达单元。
5、进一步地,所述数据采集模块包括可见光相机、红外相机和高光谱相机;
6、所述导航模块还包括惯性测量单元,所述惯性测量单元安装在所述控制模块前方,在所述惯性测量单元上方设置激光雷达单元,所述控制模块安装在激光雷达单元后方。
7、进一步地,所述驱动模块包括驱动电机、电机调速器和减速装置,所述履带式底盘内部左右两侧各设有一个电机调速器、驱动电机和减速装置;
8、所述控制模块通过can总线与所述电机调速器进行通信,用于实时获取所述驱动电机的转速和转矩电流;所述控制模块通过电机调速器将控制指令发送给驱动电机,驱动电机转动带动减速装置从而带动所述履带式地盘的履带转动。
9、进一步地,所述平台车还包括上位机,所述上位机与平台车之间通过4g进行通信,通过所述上位机可实时展示平台车的运行状态。
10、2、一种用于控制上述玉米作物多模态数据采集平台车的控制方法,包括:
11、通过激光雷达单元采集点云数据;
12、根据所述点云数据判断平台车是否到达地头,若是则进行转弯路径拟合,否则进行直行路径拟合直至到达地头;
13、根据拟合路径控制所述驱动模块,从而调整平台车前进方向;
14、判断平台车是否移动预设采集距离,若是则通过数据采集模块采集玉米作物数据。
15、进一步地,根据所述激光雷达数据判断平台车是否到达地头,包括:当所述激光雷达单元采集到的点云数据量小于预设阈值时,平台车判定为达到地头。
16、进一步地,转弯路径拟合包括如下步骤:
17、平台车保持当前状态直行第一预设距离d1;
18、平台车进行半径为预设半径r的圆周运动旋转180°,预设半径r根据玉米地每行之间的间隔确定;
19、平台车直行第二预设距离d2从而进入垄沟内,完成弯道路径拟合。
20、进一步地,根据拟合路径控制所述驱动模块,包括:
21、以平台车为原点,平台车前进方向为y轴负方向,建立平面直角坐标系;
22、计算平台车前进方向与拟合路径的航向偏角和横向偏差;
23、将航向偏角和横向偏差输入模糊控制器,输出平台车两侧驱动电机的转速差;
24、将所述转速差输至电机调速器用于控制驱动电机转速,从而调整平台车前进方向;
25、其中,航向偏角为负且横向偏差为正时,平台车左转;航向偏角为正且横向偏差为负时,平台车右转;航向偏角和横向偏差都为负时,平台车左转和/或直行,横向偏差的绝对值越小,左转的执行程度越大;航向偏角和横向偏差都为正时,平台车右转和/或直行,横向偏差越大,右转的执行程度越大。
26、进一步地,所述航向偏角和横向偏差表示为:
27、
28、
29、其中,v为平台车的速度,θ为航向偏角,d为横向偏差,k为导航路径方程的斜率,b为导航路径方程的截距。
30、3、一种电子设备,包括处理器和存储装置,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行上述方法。
31、本发明提供的玉米作物多模态数据采集平台车及其控制方法,至少包括如下有益效果:
32、(1)本发明采用在底面行进的平台车采集玉米数据,从底部采集玉米作物数据,弥补了现有平台无法采集玉米中下部分数据的不足,针对玉米地环境的复杂性和平台车的越野性能,平台车设计为履带式,使得平台车更加适用于在玉米地环境中行进;
33、(2)整个采集系统配备有上位机可实时查看平台车的运行状态,上位机与平台车之间通过4g进行通信,无通信距离限制,并且整个采集过程中无需人员操作即可自动完成,较已存在的数据采集平台,该平台车的自动化、智能化程度更高。
技术特征:
1.一种玉米作物多模态数据采集平台车,其特征在于,包括履带式底盘,安装于所述履带式底盘上方的导航模块和控制模块,所述控制模块设置于所述导航模块后方;还包括与所述履带式底盘连接的驱动模块,以及设置于所述控制模块上方的数据采集模块;
2.根据权利要求1所述的平台车,其特征在于,所述数据采集模块包括可见光相机、红外相机和高光谱相机;
3.根据权利要求1所述的平台车,其特征在于,所述驱动模块包括驱动电机、电机调速器和减速装置,所述履带式底盘内部左右两侧各设有一个电机调速器、驱动电机和减速装置;
4.根据权利要求1所述的平台车,其特征在于,所述平台车还包括上位机,所述上位机与平台车之间通过4g进行通信,通过所述上位机可实时展示平台车的运行状态。
5.一种用于控制如权利要求1-4任一所述的玉米作物多模态数据采集平台车的控制方法,其特征在于,包括:
6.根据权利要求5所述的方法,其特征在于,根据所述激光雷达数据判断平台车是否到达地头,包括:当所述激光雷达单元采集到的点云数据量小于预设阈值时,平台车判定为达到地头。
7.根据权利要求5所述的方法,其特征在于,转弯路径拟合包括如下步骤:
8.根据权利要求5所述的方法,其特征在于,根据拟合路径控制所述驱动模块,包括:
9.根据权利要求8所述的方法,其特征在于,所述航向偏角和横向偏差表示为:
10.一种电子设备,包括处理器和存储装置,其特征在于,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行如权利要求5-9所述的方法。
技术总结
一种玉米作物多模态数据采集平台车及其控制方法,涉及农业数据采集技术领域,解决的技术问题为“如何提供一种从底部采集玉米作物数据的玉米采集平台”,控制方法包括:通过激光雷达单元采集点云数据;根据所述点云数据判断平台车是否到达地头,若是则进行转弯路径拟合,否则进行直行路径拟合直至到达地头;根据拟合路径控制所述驱动模块,从而调整平台车前进方向;判断平台车是否移动预设采集距离,若是则通过数据采集模块采集玉米作物数据;该平台车及控制方法采用在底面行进的平台车从底部采集玉米作物数据,弥补了现有平台无法采集玉米中下部分数据的不足,且整个采集过程中无需人员操作即可自动完成,自动化程度更高。
技术研发人员:李永强,霍震,姚鸿勋,程凯东
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!