基于滑模自抗扰和改进PD的带臂旋翼飞行器控制方法及系统
本发明涉及航空飞行器,特别涉及一种基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法及系统。
背景技术:
1、旋翼飞行器是一种小型的非载人飞行器,它的驱动力来自于搭载的旋翼。其中多旋翼无人机所具有的悬停、垂直起降、运动灵活等特点,可以适应更多的作业环境。但是目前无人机的应用主要集中于环境建模、农林植保、航拍摄影、电力巡检等非接触式作业,没有与外界环境开展有效的交互,这大大限制了无人机的实际应用范围。带臂旋翼飞行器相对于传统的地面操作机器人有着更强的空间可达性与机动性,同时兼具机械臂的操作能力。它们可以更快到达灾害现场执行设备的投放工作,还可以实现在空中快速抓取物体。这将大大拓展无人机的应用领域,使其从传统的非接触式作业转向主动接触式作业。
2、四旋翼飞行器通过调节四个电机来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。这种动力产生机制导致系统具有高度耦合、非线性和欠驱动的特性。这些特性使得旋翼飞行器对外界的干扰很敏感。而机械臂运动时会带来重心、转动惯量的变化,同时对机身施加反作用力矩,跟踪目标时需要对机体和机械臂同时进行位置速度的控制。需要针对如何分析带臂旋翼飞行器的系统设计了一种控制器,以消除机械臂作业时对旋翼飞行器的扰动,提高机械臂控制精度,保证带臂旋翼飞行器高效协同作业,具有广阔的应用前景。
3、传统的pid控制器是一种基于误差的线性控制方法,广泛应用于旋翼飞行器的控制,但是抗干扰能力比较差,对于带臂旋翼飞行器控制中的复杂非线性和耦合关系难以保证控制的鲁棒性。滑模控制是一种广泛使用的非线性变结构控制方法,它通过施加一个高频开关控制信号来改变非线性系统的动态特性。系统轨迹将在有限时间内到达并保持在滑动面附近。对于具有大不确定性、时变特性、非线性的系统具有较强的鲁棒性。但滑模控制器输出量常常含有高频噪声,作用于实物系统容易引发电机抖振。同时对于机械臂动作时产生的较大时变扰动也无法快速收敛。
4、机械臂运动的精确控制是带臂旋翼飞行器精准作业的重要环节,现有的机载机械臂控制大多只基于机械臂的运动学模型,只考虑各个关节的角度跟踪误差采用简单的反馈控制。虽然这样计算简单可靠,但是它没有考虑到机械臂运动和负载变化时带来的动力学结构变化,也没有考虑机械臂动力学模型中非线性项的干扰,难以做到对轨迹的高速精确跟踪。
技术实现思路
1、本发明提供一种基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法及系统,以用于解决现有带臂旋翼飞行器存在高耦合、非线性、欠驱动和易受到机械臂作业扰动的技术问题。
2、本发明一方面实施例提供一种基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法,包括:
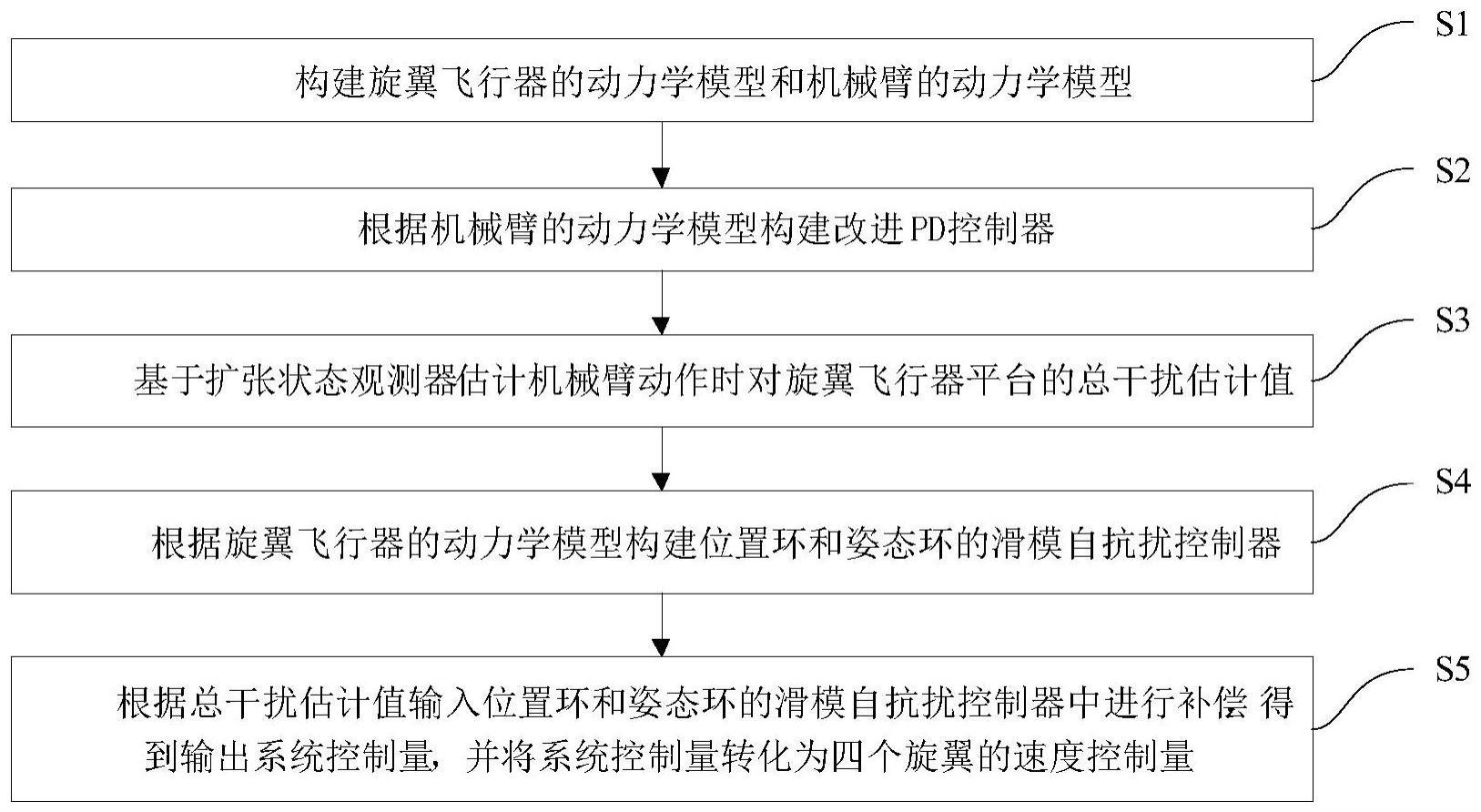
3、步骤s1,构建旋翼飞行器的动力学模型和机械臂的动力学模型;
4、步骤s2,根据所述机械臂的动力学模型构建改进pd控制器;
5、步骤s3,基于扩张状态观测器估计机械臂动作时对旋翼飞行器平台的总干扰估计值;
6、步骤s4,根据所述旋翼飞行器的动力学模型构建位置环和姿态环的滑模自抗扰控制器;
7、步骤s5,根据所述总干扰估计值输入所述位置环和姿态环的滑模自抗扰控制器中进行补偿,得到输出系统控制量,并将所述系统控制量转化为四个旋翼的速度控制量。
8、本发明另一方面实施例提供一种基于滑模自抗扰和改进pd的带臂旋翼飞行器控制系统,包括:
9、第一构建模块,用于构建旋翼飞行器的动力学模型和机械臂的动力学模型;
10、设计模块,用于根据所述机械臂的动力学模型构建改进pd控制器;
11、估计模块,用于基于扩张状态观测器估计机械臂动作时对旋翼飞行器平台的总干扰估计值;
12、第二构建模块,用于根据所述旋翼飞行器的动力学模型设计构建位置环和姿态环的滑模自抗扰控制器;
13、补偿和转化模块,用于根据所述总干扰估计值输入所述位置环和姿态环的滑模自抗扰控制器中进行补偿,得到输出系统控制量,并将所述系统控制量转化为四个旋翼的速度控制量。
14、本发明又一方面实施例提供一种带臂旋翼飞行器控制设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现如上述实施例所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法。
15、本发明还一方面实施例提供一种非临时性计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法。
16、本发明的技术方案,至少实现了如下有益的技术效果:
17、(1)相比于传统的线性控制器,本发明利用滑模变结构控制针对系统模型的非线性和耦合问题,设计双环控制器解决飞行器姿态大幅变化时的高精度跟踪问题,可有效实现机械臂的精准控制和对机械臂扰动的观测和抑制,保证飞行器的稳定控制;
18、(2)设计饱和函数代替符号函数,消除传统滑模控制器的输出量抖动,同时利用扩张状态观测器对机械臂扰动进行观测并将扰动观测值带入控制器,有效地消除了机械臂动作的影响;
19、(3)相比于单一基于运动学的机械臂控制器,本发明利用机械臂动力学模型提出的改进pd控制器,考虑机械臂运动和负载变化时带来的动力学结构变化和动力学模型中非线性项的干扰,提高了机械臂控制的精度和速度;
20、(4)本发明综合了滑模控制器、扩张状态观测器和改进pd控制器的优势,在带臂旋翼飞行器稳定作业任务中,提高了飞行器的抗干扰能力和控制精度,具有较高的工程应用价值。
21、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法,其特征在于,所述步骤s1具体包括:
3.根据权利要求1所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法,其特征在于,所述步骤s2具体包括:
4.根据权利要求3所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法,其特征在于,所述改进pd控制器为:
5.根据权利要求1所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法,其特征在于,所述步骤s3具体包括:
6.根据权利要求1所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法,其特征在于,所述步骤s4具体包括:
7.根据权利要求6所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法,其特征在于,在所述步骤s402之前,需将所述传统滑模自抗扰控制器中符号函数更换为饱和函数。
8.一种基于滑模自抗扰和改进pd的带臂旋翼飞行器控制系统,其特征在于,包括:
9.一种带臂旋翼飞行器控制设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-7中任一所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法。
10.一种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7中任一所述的基于滑模自抗扰和改进pd的带臂旋翼飞行器控制方法。
技术总结
本发明公开了一种基于滑模自抗扰和改进PD的带臂旋翼飞行器控制方法及系统,其中,该方法包括:分别构建旋翼飞行器和机械臂的动力学模型;根据机械臂的动力学模型构建改进PD控制器;估计机械臂动作时对旋翼飞行器平台的总干扰估计值;根据旋翼飞行器的动力学模型构建位置环和姿态环的滑模自抗扰控制器;根据总干扰估计值输入该滑模自抗扰控制器中进行补偿,得到输出系统控制量,并将其转化为四个旋翼的速度控制量。该方法利用扩张状态观测器来观测旋翼飞行器平台受到的机械臂扰动,并结合非线性的滑模变结构控制实时补偿机械臂作业产生的干扰,同时基于动力学模型设计机械臂的改进PD控制器,提高带臂旋翼飞行器的作业精度和稳定性。
技术研发人员:纪小宇,韩成哲,丁一航,吴桐,张瑞先,蔡博,翁睿
受保护的技术使用者:哈尔滨工业大学人工智能研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!