车辆路径跟踪控制方法、装置、系统和存储介质与流程
本发明涉及车辆控制,尤其是一种车辆路径跟踪控制方法、装置、系统和存储介质。
背景技术:
1、近年来车辆成为了国内外学者的研究热点,面向路径跟踪的控制技术是实现车辆高安全、高可靠自动驾驶的关键环节,也是推动车辆实现全天候和全工况落地推广必须攻克的关键技术之一。
2、相关技术中,通过ltv-mpc(线性时变模型预测控制方法)实现车辆路径跟踪控制,预测时域和控制时域作为该控制方法中的重要参数。
3、然而,车辆在行驶过程中的自身和环境状态是实时发生变化的,该方法对于不同行驶车速和路面条件的适应性有待提升,对于车辆在不同工况下的跟踪控制精度低且不稳定。
技术实现思路
1、本发明的目的是提供一种车辆路径跟踪控制方法、装置、系统和存储介质,旨在提高车辆在不同工况下跟踪控制的精度和稳定性。
2、第一方面,提供一种车辆路径跟踪控制方法,包括:
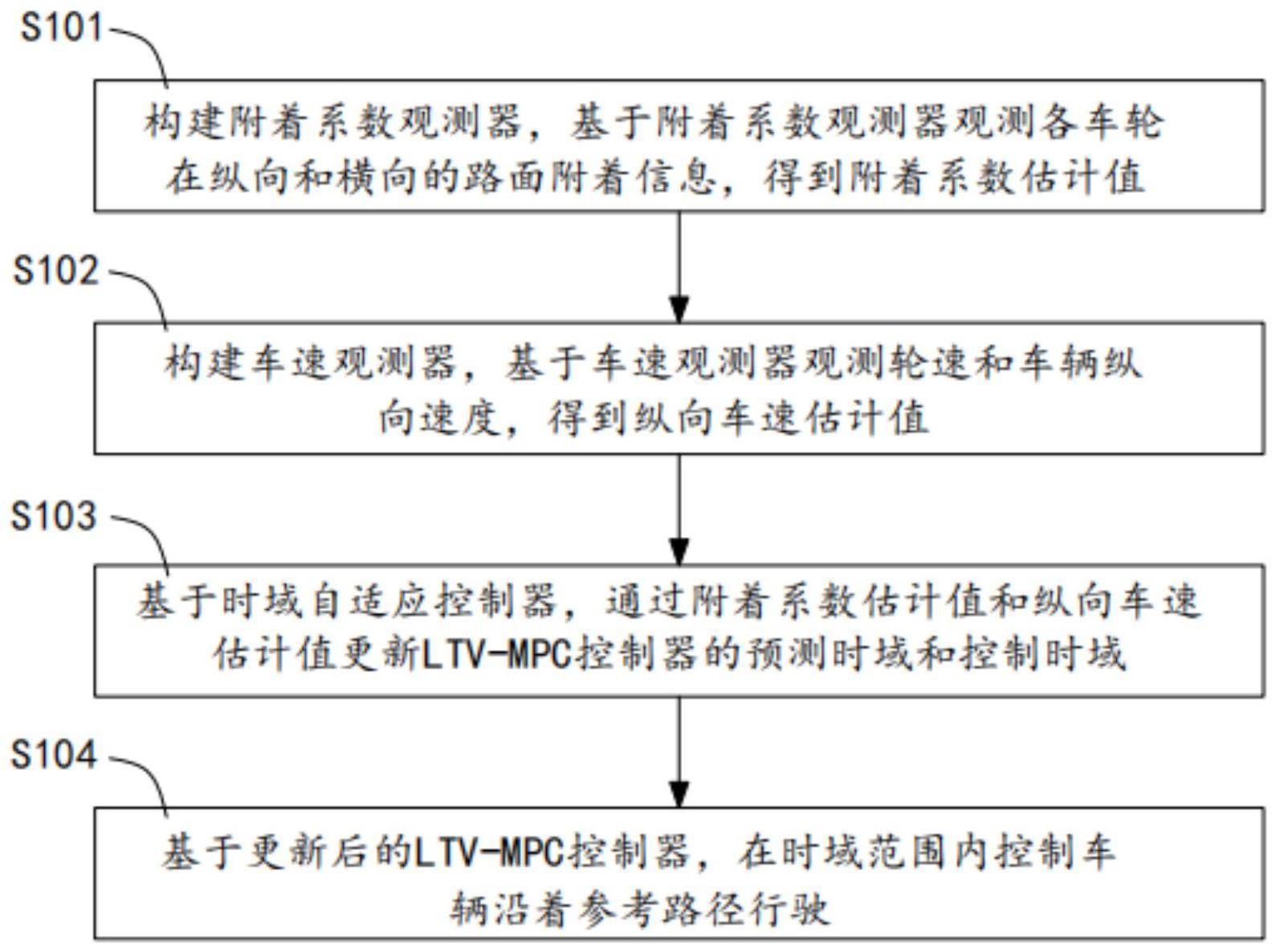
3、构建附着系数观测器,基于附着系数观测器观测各车轮在纵向和横向的路面附着信息,得到附着系数估计值;
4、构建车速观测器,基于车速观测器观测轮速和车辆纵向速度,得到纵向车速估计值;
5、基于时域自适应控制器,通过附着系数估计值和纵向车速估计值更新ltv-mpc控制器的预测时域和控制时域,所述时域自适应控制器为以最小横向位置跟踪均方根误差为目标训练而成;
6、基于更新后的ltv-mpc控制器,在时域范围内控制车辆沿着参考路径行驶。
7、在一些实施例中,所述构建附着系数观测器,基于附着系数观测器观测各车轮在纵向和横向的路面附着信息,得到附着系数估计值,包括:
8、基于递归最小二乘法实时估算各车轮在纵向和横向的路面附着信息,得到纵向附着系数估计值和横向附着系数估计值;
9、融合各车轮的纵向附着系数估计值和横向附着系数估计值,得到附着系数估计值。
10、在一些实施例中,所述构建车速观测器,基于车速观测器观测轮速和车辆纵向速度,得到纵向车速估计值,包括:
11、依据轮速估算车辆纵向速度,得到第一估算结果,依据车辆纵向加速度与第一约束区间之间的偏离程度修正第一估算结果,得到第一纵向速度;
12、对车辆纵向运动学模型进行积分运算,得到表征各个时刻车辆纵向速度的若干个第二估算结果,依据上一时刻车辆纵向速度的运动学估算结果和当前时刻的第二估算结果计算当前时刻车辆纵向速度的运动学估算结果,得到第二纵向速度,所述车辆纵向运动学模型描述车辆纵向加速度和车辆纵向速度之间的纵向运动学关系;
13、依据车辆纵向加速度与第二约束区间之间的偏离程度,以第一纵向速度和第二纵向速度的加权运算结果作为纵向车速估计值,所述第一纵向速度的加权系数与车辆纵向加速度呈负相关,所述第二纵向速度的加权系数与车辆纵向加速度呈正相关。
14、在一些实施例中,所述依据车辆纵向加速度与第二约束区间之间的偏离程度,以第一纵向速度和第二纵向速度的加权运算结果作为纵向车速估计值,包括:
15、比较车辆纵向加速度与第二约束区间,当车辆纵向加速度小于第二约束区间时,以第一纵向速度作为纵向车速估计值,当车辆纵向加速度大于第二约束区间时,以第二纵向速度作为纵向车速估计值,当车辆纵向加速度处于第二约束区间内时,以融合第一纵向速度和第二纵向速度的结果作为纵向车速估计值。
16、在一些实施例中,所述基于时域自适应控制器,通过附着系数估计值和纵向车速估计值更新ltv-mpc控制器的预测时域和控制时域,包括:
17、以最小横向位置跟踪均方根误差为目标,构建时域自适应控制器;
18、输入历史观测的附着系数估计值和纵向车速估计值并以最小横向位置跟踪均方根误差为目标迭代训练时域自适应控制器;
19、依据当前时刻的附着系数估计值和纵向车速估计值,通过训练后的域自适应控制器更新ltv-mpc控制器的预测时域和控制时域。
20、在一些实施例中,所述输入历史观测得到的附着系数估计值和纵向车速估计值并以最小横向位置跟踪均方根误差为目标迭代训练时域自适应控制器,包括:
21、以最小横向位置跟踪均方根误差为目标设计适应度函数,基于pso算法,通过适应度函数迭代计算时域自适应控制器输入历史观测的附着系数估计值和纵向车速估计值时输出预测时域和控制时域的适应度,在迭代次数到达或迭代结果达到适应度指标时,得到优化后的预测时域和控制时域。
22、在一些实施例中,所述基于更新后的ltv-mpc控制器,在时域范围内控制车辆沿着参考路径行驶,包括:
23、基于ltv-mpc控制方法,以前轮最优转角为优化目标构建目标函数;
24、对目标函数的输出量和输出增量进行约束;
25、通过约束后的目标函数在时域范围内求取局部最优解,得到实时的前轮最优转角。
26、第二方面,提供一种车辆路径跟踪控制装置,所述装置包括:
27、第一模块,用于构建附着系数观测器,基于附着系数观测器观测各车轮在纵向和横向的路面附着信息,得到附着系数估计值;
28、第二模块,用于构建车速观测器,基于车速观测器观测轮速和车辆纵向速度,得到纵向车速估计值;
29、第三模块,用于基于时域自适应控制器,通过附着系数估计值和纵向车速估计值更新ltv-mpc控制器的预测时域和控制时域,所述时域自适应控制器为以最小横向位置跟踪均方根误差为目标训练而成;
30、第四模块,用于基于更新后的ltv-mpc控制器,在时域范围内控制车辆沿着参考路径行驶。
31、第三方面,提供一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面所述的车辆路径跟踪控制方法。
32、第四方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现第一方面所述的车辆路径跟踪控制方法。
33、本发明的有益效果:在路径跟踪行驶过程中,根据可由车辆传感器获取的路面附着数据、轮速和车辆纵向速度,通过所构建的附着系数观测器和车辆行驶速度观测器进行观测估计,得到附着系数估计值和纵向车速估计值,将附着系数估计值和纵向车速估计值输入至训练得到的时域自适应控制器以更新ltv-mpc控制器的预测时域和控制时域,ltv-mpc控制器在时域自适应控制器上位控制的作用下,实现了自身时域参数的动态变化并当前输入的附着系数估计值和纵向车速估计值控制车辆沿参考路径行驶,提高不同行驶工况下的路径跟踪精度和稳定性,车辆传感器、ltv-mpc控制器、附着系数观测器和车速观测器实现路径跟踪过程的闭环控制,提高了ltv-mpc控制器的鲁棒性。
技术特征:
1.一种车辆路径跟踪控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆路径跟踪控制方法,其特征在于,所述构建附着系数观测器,基于附着系数观测器观测各车轮在纵向和横向的路面附着信息,得到附着系数估计值,包括:
3.根据权利要求1所述的车辆路径跟踪控制方法,其特征在于,所述构建车速观测器,基于车速观测器观测轮速和车辆纵向速度,得到纵向车速估计值,包括:
4.根据权利要求1所述的车辆路径跟踪控制方法,其特征在于,所述依据车辆纵向加速度与第二约束区间之间的偏离程度,以第一纵向速度和第二纵向速度的加权运算结果作为纵向车速估计值,包括:
5.根据权利要求1所述的车辆路径跟踪控制方法,其特征在于,所述基于时域自适应控制器,通过附着系数估计值和纵向车速估计值更新ltv-mpc控制器的预测时域和控制时域,包括:
6.根据权利要求5所述的车辆路径跟踪控制方法,其特征在于,所述输入历史观测得到的附着系数估计值和纵向车速估计值并以最小横向位置跟踪均方根误差为目标迭代训练时域自适应控制器,包括:
7.根据权利要求1所述的车辆路径跟踪控制方法,其特征在于,所述基于更新后的ltv-mpc控制器,在时域范围内控制车辆沿着参考路径行驶,包括:
8.一种车辆路径跟踪控制装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1至7任一项所述的车辆路径跟踪控制方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的车辆路径跟踪控制方法。
技术总结
本发明涉及车辆控制技术领域,公开一种车辆路径跟踪控制方法、装置、系统和存储介质。该方法包括:构建附着系数观测器,基于附着系数观测器观测各车轮在纵向和横向的路面附着信息,得到附着系数估计值;构建车速观测器,基于车速观测器观测轮速和车辆纵向速度,得到纵向车速估计值;基于时域自适应控制器,通过附着系数估计值和纵向车速估计值更新LTV‑MPC控制器的预测时域和控制时域;基于更新后的LTV‑MPC控制器,在时域范围内控制车辆沿着参考路径行驶。本发明实施例可以提高车辆在不同工况下跟踪控制的精度和稳定性。
技术研发人员:尹智帅,董证瑞,聂琳真,卢伯昂
受保护的技术使用者:佛山仙湖实验室
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!