基于现场可编程门阵列的风电机组全闭环仿真器及方法
本发明属于风电机组仿真,尤其涉及基于现场可编程门阵列的风电机组全闭环仿真器及方法。
背景技术:
1、风电已成为世界上最大的可再生能源之一,在未来电力供应中扮演着非常重要的角色。随着相关技术的发展,风电机组单机容量和尺寸逐步增大,极大的增加了风电机组设计和测试的难度。因此,亟需深入地研究风电机组的仿真技术,从而优化和提高大型风电机组的设计流程及测试精度。基于实时仿真技术,进行风电机组的硬件在环仿真,能够提高测试精度和测试过程的安全性,同时降低测试成本。例如采用机组电磁暂态实时仿真进行并网控制器的硬件在环测试,能够提高仿真置信度,并提升测试效率。此外,搭建风电控制器的实时计算平台能够为控制策略的测试带来极大的便利。
2、风电机组的电磁系统包括发电机、变换器、变压器、断路器等多种暂态时间尺度为微秒级的元件。风电机组变换器的开关频率一般为上千赫兹;其高频的开关状态变化对电磁暂态模型的计算带来了极大的挑战。总的来说,风电机组电磁暂态实时仿真的特征和难点在于模型时间尺度短、计算量大。同时,机组控制器的计算具备逻辑复杂、计算量小的特点。
3、发明人发现,为了解决风电机组实时仿真的问题,已有发明提到采用fpga进行风电机组模型的实时仿真,但这种方案未提出机组控制器的构建方法,仅能通过外接控制器实现机组的闭环仿真,因此其测试流程比较繁琐,不够便利;已有发明基于dsp平台提出机组控制器的搭建方法,结合风电机组对拖实验平台,构成风电机组闭环实时仿真平台;由于dsp开发难度高,因此这种方案对于新型控制算法的开发不够友好;上述方案均无法方便地进行风电机组闭环实时仿真。已有文献提出采用fpga实现风电机组的电磁系统实时仿真,但现有方案中电路参数改变时,均需要重新编译fpga程序,而fpga程序的编译非常耗时,平均可达24小时,这极大的限制了仿真的灵活程度。此外,现有成熟商业仿真平台rtds和rt-lab能够进行风电机组闭环实时仿真,但其软硬件成本很高。
技术实现思路
1、本发明为了解决上述问题,提出了一种基于现场可编程门阵列的风电机组全闭环仿真器及方法,能够用于风电机组控制算法策略快速验证和实际控制器的硬件在环仿真验证,解决了现有技术中存在的风电机组控制算法测试不便、硬件在环仿真流程复杂的问题,本发明涉及的设备成本较低,具备较高的经济性。
2、为了实现上述目的,第一方面,本发明提供了一种基于现场可编程门阵列的风电机组全闭环仿真器,采用如下技术方案:
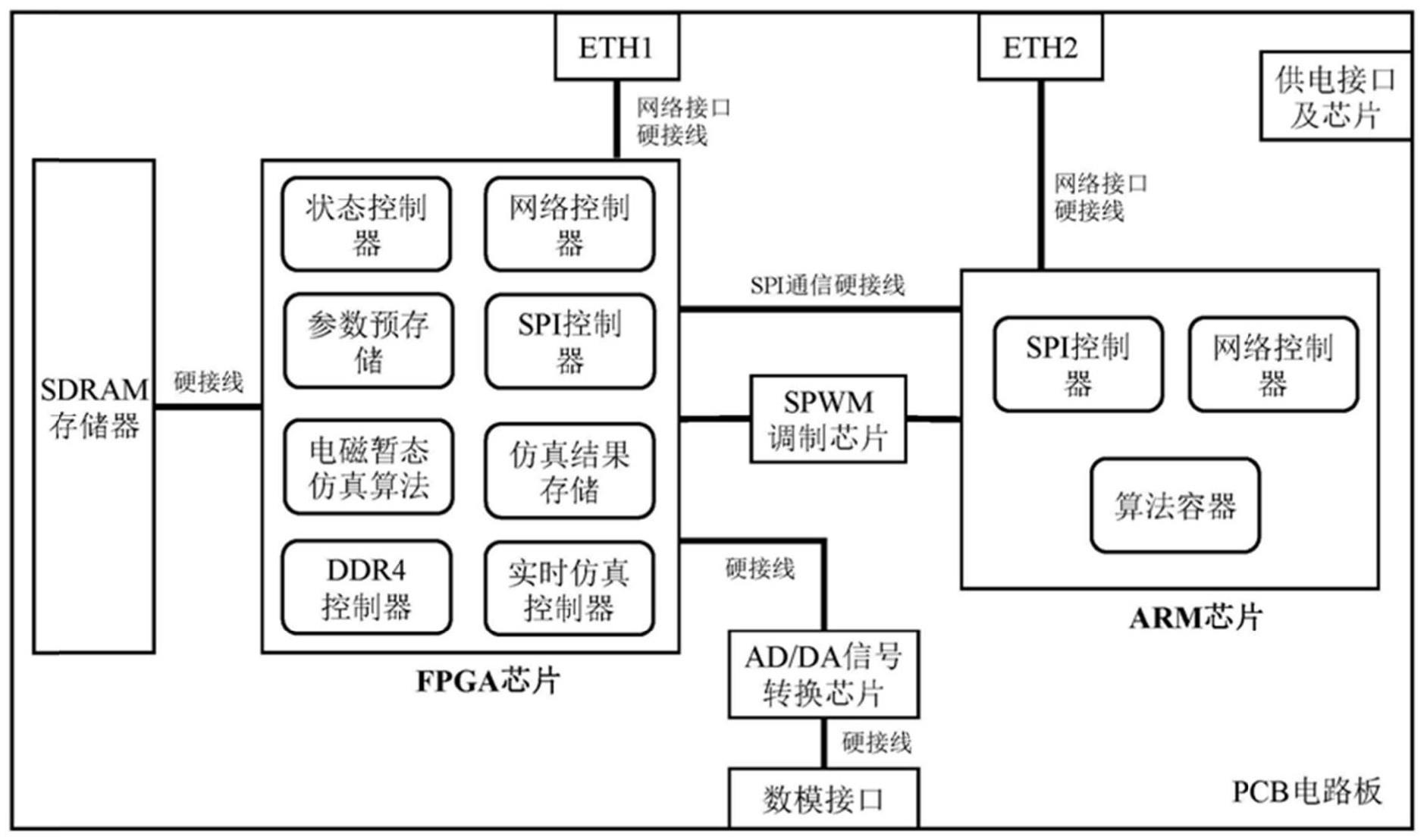
3、一种基于现场可编程门阵列的风电机组全闭环仿真器,包括现场可编程门阵列芯片,以及与所述现场可编程门阵列芯片连接的arm芯片和数模接口;
4、所述现场可编程门阵列芯片,用于风电机组电磁系统的暂态实时仿真;
5、所述arm芯片,用于风电机组控制器算法的实时运算;所述arm芯片和所述现场可编程门阵列芯片之间通过数模通道交互实时数据;
6、所述数模接口,用于连接外部实际风电机组控制器。
7、进一步的,所述可编程门阵列芯片包括用于标识当前仿真器状态的状态控制器、用于实时计算电磁暂态过程的电磁暂态仿真算法以及用于定时的实时仿真控制器。
8、进一步的,所述可编程门阵列芯片接收到上位机指令时,在等待、运行、停止和结果输出四个状态中转换;仿真器内部出现不影响仿真进行的异常时,状态控制器置于异常状态,但仍进行仿真;仿真器内部出现影响仿真进行的异常时,状态控制器置于错误状态,且停止仿真。
9、进一步的,所述电磁暂态仿真算法基于多区戴维南等效的方法,将风电机组电磁系统划分为多个子系统,多个子系统之间无数据依赖,实现风电机组电磁系统的并行化计算。
10、进一步的,所述可编程门阵列芯片连接有eth1网络接口;在上位机中预先计算所有开关状态下的导纳矩阵的逆矩阵和仿真所需参数,上位机软件通过eth1网络接口将数据下发至仿真器中,并由所述可编程门阵列芯片将导纳矩阵的逆和仿真所需参数进行存储。
11、进一步的,当所述实时仿真控制器的定时达到了仿真步长之后,控制电磁暂态仿真算法开始计算。
12、进一步的,所述可编程门阵列芯片连接有存储器;所述可编程门阵列芯片接收到上位机下发的初始化指令后,从存储器中取出预定义的仿真参数,并存储在所述可编程门阵列芯片中。
13、进一步的,所述可编程门阵列芯片在每个仿真步长周期到达后,均会依据当前开关元件的开关状态计算导纳矩阵的逆矩阵的索引值,从所述存储器中取出相应导纳矩阵供仿真计算使用。
14、进一步的,接入外部实际风电机组控制器时,所述可编程门阵列芯片自动屏蔽所述arm芯片的数据传输通路,并自动切换为与所述数模接口的数据传输通路。
15、为了实现上述目的,第二方面,本发明还提供了一种基于现场可编程门阵列的风电机组全闭环仿真方法,采用如下技术方案:
16、一种基于现场可编程门阵列的风电机组全闭环仿真方法,采用了如第一方面中所述的基于现场可编程门阵列的风电机组全闭环仿真器。
17、与现有技术相比,本发明的有益效果为:
18、1、本发明采用现场可编程门阵列芯片,借助现场可编程门阵列芯片强大的并行计算能力,实现了风电机组电磁系统的暂态实时仿真,相较于现有技术,能够采用内置控制器快速验证控制策略的效果,并且通过数模接口能够接入实际风电机组控制器,进行硬件在环仿真,以测试其控制效果;同时,arm芯片用于风电机组控制器算法的实时运算载体,与现场可编程门阵列芯片之间通过数模通道交互实时数据,实现了风电机组闭环实时仿真平台;
19、2、本发明设计了一种基于fpga-arm异构型计算平台的闭环风电机组实时仿真器,同时考虑了风电机组仿真和控制器实现;相较于现有技术,该仿真器能够采用内置控制器快速验证控制策略的效果,同时也能够接入实际风电机组控制器,进行硬件在环仿真,以测试其控制效果;借助fpga强大的并行计算能力,该仿真器实现了风电机组电磁系统的暂态实时仿真;实现了无需重新编译fpga程序即可修改仿真参数的可重配置功能,大大提高了仿真器使用的便利性;同时,该仿真器内置基于arm平台的控制器单元,用于风电机组控制器算法的实时运算载体;fpga与arm平台之间通过数模通道交互实时数据,实现了风电机组闭环实时仿真平台;该仿真器内置了多通道数模转换接口,实现了仿真器和外部设备的实时数据交互。
技术特征:
1.基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,包括现场可编程门阵列芯片,以及与所述现场可编程门阵列芯片连接的arm芯片和数模接口;
2.如权利要求1所述的基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,所述可编程门阵列芯片包括用于标识当前仿真器状态的状态控制器、用于实时计算电磁暂态过程的电磁暂态仿真算法以及用于定时的实时仿真控制器。
3.如权利要求2所述的基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,所述可编程门阵列芯片接收到上位机指令时,在等待、运行、停止和结果输出四个状态中转换;仿真器内部出现不影响仿真进行的异常时,状态控制器置于异常状态,但仍进行仿真;仿真器内部出现影响仿真进行的异常时,状态控制器置于错误状态,且停止仿真。
4.如权利要求2所述的基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,所述电磁暂态仿真算法基于多区戴维南等效的方法,将风电机组电磁系统划分为多个子系统,多个子系统之间无数据依赖,实现风电机组电磁系统的并行化计算。
5.如权利要求2所述的基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,所述可编程门阵列芯片连接有eth1网络接口;在上位机中预先计算所有开关状态下的导纳矩阵的逆矩阵和仿真所需参数,上位机软件通过eth1网络接口将数据下发至仿真器中,并由所述可编程门阵列芯片将导纳矩阵的逆和仿真所需参数进行存储。
6.如权利要求2所述的基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,当所述实时仿真控制器的定时达到了仿真步长之后,控制电磁暂态仿真算法开始计算。
7.如权利要求1所述的基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,所述可编程门阵列芯片连接有存储器;所述可编程门阵列芯片接收到上位机下发的初始化指令后,从存储器中取出预定义的仿真参数,并存储在所述可编程门阵列芯片中。
8.如权利要求7所述的基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,所述可编程门阵列芯片在每个仿真步长周期到达后,均会依据当前开关元件的开关状态计算导纳矩阵的逆矩阵的索引值,从所述存储器中取出相应导纳矩阵供仿真计算使用。
9.如权利要求1所述的基于现场可编程门阵列的风电机组全闭环仿真器,其特征在于,接入外部实际风电机组控制器时,所述可编程门阵列芯片自动屏蔽所述arm芯片的数据传输通路,并自动切换为与所述数模接口的数据传输通路。
10.基于现场可编程门阵列的风电机组全闭环仿真方法,其特征在于,采用了如权利要求1-9任一项所述的基于现场可编程门阵列的风电机组全闭环仿真器。
技术总结
本发明属于风电机组仿真技术领域,提出了一种基于现场可编程门阵列的风电机组全闭环仿真器及方法,包括现场可编程门阵列芯片,以及与所述现场可编程门阵列芯片连接的ARM芯片和数模接口;本发明采用现场可编程门阵列芯片,借助现场可编程门阵列芯片强大的并行计算能力,实现了风电机组电磁系统的暂态实时仿真,相较于现有技术,能够采用内置控制器快速验证控制策略的效果,并且通过数模接口能够接入实际风电机组控制器,进行硬件在环仿真,以测试其控制效果;同时,ARM芯片用于风电机组控制器算法的实时运算载体,与现场可编程门阵列芯片之间通过数模通道交互实时数据,实现了风电机组闭环实时仿真平台。
技术研发人员:赵浩然,李冰
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!