基于改进Glasius仿生神经网络的静态目标搜索方法与装置
本发明涉及glasius仿生神经网络,尤其涉及水下自主航行器的路径规划。
背景技术:
1、海洋资源蕴藏着无限的可能性,然而其环境却异常复杂和恶劣,这使得对海洋的探索变得极具挑战性。自主水下航行器(autonomous underwater vehicle,auv)作为一种高度智能化的设备,具有可装载水下装置、良好的水下移动灵活性和经济适用性等特点,无论在军事领域还是民事领域上,均已受到了广泛关注。
2、目标搜索是auv应用的重要领域之一,auv通过集成各种先进的传感器设备,如声呐、水下相机以及光电设备等,可以对水下环境进行高效、精准的探测和感知。目标搜索本质上是最优路径规划问题。在目标搜索领域中,auv通常需要在未知的水下环境中,通过最优路径寻找并定位目标物体;因此,高精度和高效率的路径规划,成为了实现auv水下探测任务的关键。
3、现有的路径规划方法,一般是采用生物启发神经网络构建路径规划模型;这种方法可以利用先验信息,提取出高价值区域并忽略低价值区域,将水下栅格地图与生物启发神经网络相联系,通过该神经网络中神经元的活性值分布情况,制定auv的路径规划模型。其中,所述先验信息,可以通过目标预警信息、信号消失位置、时间或其他因素来获取。
4、仿生神经网络(bio-inspired neural network,bnn),是一种高效而灵活的生物启发神经网络。近年来,所述仿生神经网络已在多智能体路径规划、目标搜索和目标围捕领域得到了广泛应用。然而,采用所述仿生神经网络进行路径规划方法,通常需要大量计算,对硬件设备的计算性能要求较高。为了解决这个问题,glasius等人基于bnn提出了glasius仿生神经网络(glasius bio-inspired neural network,gbnn)。所述gbnn,使用更简单的微分方程计算神经活动,以提高计算效率。
5、但是,虽然gbnn具有相对全局的机制,但在复杂情况下,由于神经元刺激信号的时延和衰减不可避免,所述gbnn仍可能受到局部最优解的影响,导致全局搜索能力较差,目标搜索性能不理想。
技术实现思路
1、本发明提出了基于改进glasius仿生神经网络的静态目标搜索方法与装置,解决了现有glasius仿生神经网络,由于神经元刺激信号的时延和衰减的作用,而可能受到局部最优解的影响,导致全局搜索能力较差,目标搜索性能不理想的问题。
2、本发明所述的基于改进glasius仿生神经网络的静态目标搜索方法,其技术方案如下:
3、所述方法具体包括:
4、s1、获取预先采集的先验信息;
5、s2、利用帕森窗理论,根据所述先验信息,建立一个尺寸为mapx×mapy的栅格地图,作为基础先验目标概率图;
6、s3、根据所述先验信息,获得基于贝叶斯高斯混合矩阵的先验目标概率图;所述基于贝叶斯高斯混合矩阵的先验目标概率图的尺寸为mapx×mapy;将所述基于贝叶斯高斯混合矩阵的先验目标概率图作为初始结合概率图map0;
7、s4、采用改进glasius仿生神经网络,根据所述先验信息、基础先验目标概率图以及初始结合概率图map0,进行迭代计算,通过时域滚动优化过程执行静态目标搜索任务。
8、进一步的,提供一个优选实施方式,其技术方案如下:
9、所述步骤s4具体包括:
10、s4.1、对上一次迭代计算对应的结合概率图mapdd-1进行预处理操作,获得预处理后的上一次迭代计算对应的结合概率图mapdd-1*,其中,dd为大于等于1的正整数,表示迭代次数;所述预处理操作包括最大池化、多次卷积以及上采样;
11、s4.2、将所述预处理后的上一次迭代计算对应的结合概率图mapdd-1*,与所述基础先验目标概率图结合,获得本次迭代计算对应的结合概率图mapdd;
12、s4.3、根据所述先验信息、本次迭代计算对应的结合概率图mapdd以及过去每一次迭代计算获得的所有对应航点,通过时域滚动优化过程,获得本次迭代计算对应的航点,同时更新所述基础先验目标概率图;
13、s4.4、根据过去每一次迭代计算获得的所有对应航点,计算累计检测奖励;
14、s4.5、根据所述累计检测奖励以及迭代次数dd,判断是否结束所述静态目标搜索任务;
15、如果所述累计检测奖励未达到0.95且迭代次数dd未达到预设值,则返回执行s4.1;
16、如果所述累计检测奖励达到0.95或迭代次数dd达到预设值,则所述静态目标搜索任务结束。
17、进一步的,提供一个优选实施方式,其技术方案如下:
18、所述先验信息具体如下:
19、所述先验信息包含n个数据点;其中,第i个数据点si表示为:
20、si={si,βi,λi},i∈[1,n],n为大于1的正整数;
21、其中,si为位置信息、βi为事件置信度、λi为分布范围;
22、每个所述数据点都与一个二维高斯分布函数相关联;其中,与第i个数据点si相关联的二维高斯分布函数g(si,λi)表示为:
23、
24、其中,
25、
26、βi∈[0,1];
27、
28、式中、x表示二维空间的横坐标、y表示二维空间的纵坐标;
29、根据每个所述数据点以及与其对应的二维高斯分布函数提取样本,具体地:
30、针对第i个数据点si,从与其对应的所述二维高斯分布函数g(si,λi)中,提取hi个样本;所述hi表示为:
31、hi=βihmax;
32、其中,hmax是βi=1时所提取样本的数量;
33、则根据所述样本信息提取的样本总数为h,所述样本总数h表示为:
34、
35、进一步的,提供一个优选实施方式,其技术方案如下:
36、所述基础先验目标概率图表示如下:
37、
38、其中,
39、
40、σ=(σx,σy);
41、
42、
43、式中,p代表所述基础先验目标概率图;sh表示样本位置,所述σ表示标准差;和表示h个样本的标准差;iqrx和iqry表示h个样本在两个坐标轴上的四分位数间距。
44、进一步的,提供一个优选实施方式,其技术方案如下:
45、所述步骤s3具体包括:
46、s3.1、对贝叶斯高斯混合矩阵进行参数初始化;所述贝叶斯高斯混合矩阵的参数包括聚类数量k和参数向量θ;
47、所述参数向量θ表示为:
48、θ=[πμσ];
49、其中,π表示聚类的权重系数,μ表示聚类的均值向量,∑表示聚类的协方差矩阵;
50、s3.2、采用期望最大化算法对所述贝叶斯高斯混合矩阵的参数进行更新,具体地:
51、s3.2.1、根据所述先验信息,计算第i个数据点xi属于第j个聚类的后验概率γij,表示为:
52、
53、其中,n(xi|μj,σj)表示第i个数据点xi在第j个聚类中服从的高斯分布;表示所有聚类的加权高斯分布之和;
54、s3.2.2、更新所述参数向量θ;具体地,根据所述后验概率γij,对第j个聚类的参数向量θj的更新过程,表示为如下:
55、
56、
57、
58、式中,
59、
60、其中,nj表示属于第j个聚类的数据点个数;
61、s3.2.3、根据所述参数向量θ更新后的贝叶斯高斯混合矩阵,更新所述聚类数量k;具体地:
62、计算所述聚类数量k的当前值所对应的贝叶斯信息准则值,并根据所述贝叶斯信息准则值选择最佳聚类数量k*,所述最优聚类数量k*表示为:
63、k*=argmink{bic(k)};
64、其中,bic(k)表示所述聚类数量k的当前值计算得到的贝叶斯信息准则值;所述最优聚类数量k*,是使所述bic(k)值最小的聚类数量;
65、所述bic(k)表示为:
66、
67、其中,是似然函数的最大值,是模型的参数估计值,n是数据点数量;
68、将所述最优聚类数量k*,作为所述聚类数量k更新后的值;
69、s3.2.4、判断是否继续更新所述贝叶斯高斯混合矩阵的参数,具体地:
70、如果所述聚类数量k更新后的值小于预设的最大聚类数量,且根据所述聚类数量k更新后的值计算的贝叶斯信息准则值下降的速率超过预设的阈值,那么就增加聚类数量,并返回执行步骤s3.2.1;
71、否则,所述贝叶斯高斯混合矩阵的参数更新完成;
72、s3.3、根据所述先验信息以及所述参数更新完成的贝叶斯高斯混合矩阵,获得基于贝叶斯高斯混合矩阵的先验目标概率图。
73、进一步的,提供一个优选实施方式,其技术方案如下:
74、所述步骤s4.1具体包括:
75、s4.1.1、采用改进glasius仿生神经网络,对所述上一次迭代计算对应的结合概率图mapdd-1进行池化,获得池化概率图;具体地:
76、使用最大池化对所述上一次迭代计算对应的结合概率图mapdd-1进行下采样,其中池化窗口的尺寸为wpool×wpool,步幅spool=wpool,获得一个尺寸为[mapx/spool]×[mapy/spool]的池化概率图,其中[·]表示取整函数;
77、s4.1.2、根据概率峰值区域和自主水下航行器初始位置,使用莱默平均值算法计算所述池化概率图需要进行卷积的次数,即卷积次数m,表示为:
78、
79、其中,qi表示当前位置到第i个概率峰值区域中心的欧式距离,wi表示当前时刻第i个概率峰值区域中所有栅格概率之和,p为莱默平均数的参数;
80、所述概率峰值区域,根据所述上一次迭代计算对应的结合概率图mapdd-1获得;
81、所述自主水下航行器初始位置,根据所述先验信息获得;
82、s4.1.3、采用所述改进glasius仿生神经网络的卷积核,对所述池化概率图进行m次的卷积,得到卷积概率图;
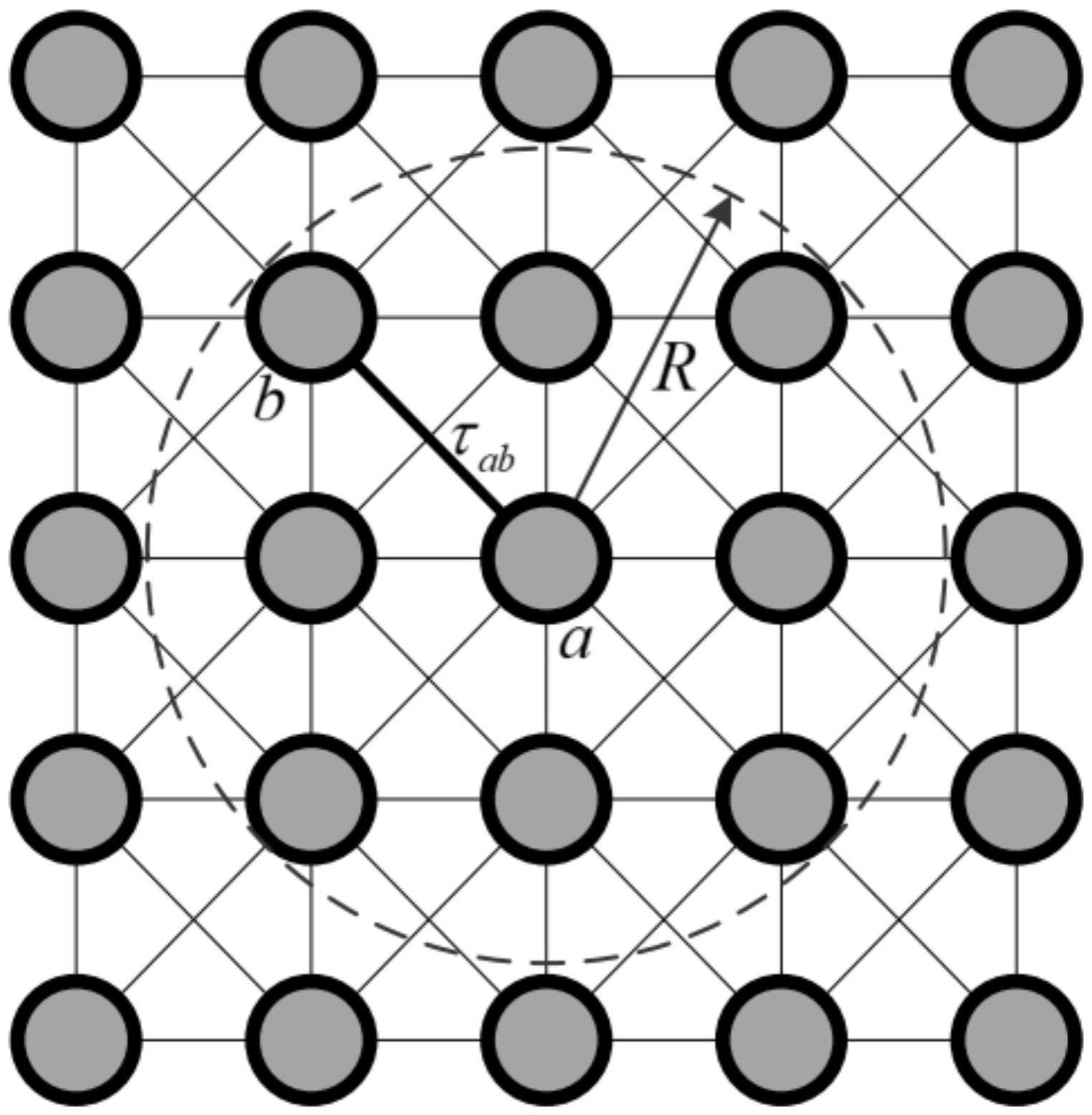
83、所述卷积核的定义如下:
84、
85、其中,τab为神经元a和神经元b之间的连接权重,|χa-χb|是两个神经元之间的欧氏距离,δ是一个大于0的常数,r表示所述改进glasius仿生神经网络接受范围的半径;
86、s4.1.4、通过双三次插值法对所述卷积概率图进行上采样,获得一个尺寸为mapx×mapy的概率图,即为预处理后的结合概率图mapdd-1*。
87、进一步的,提供一个优选实施方式,其技术方案如下:
88、所述步骤s4.2具体包括:
89、所述基础先验目标概率图,表示为一个mapx×mapy的概率矩阵a;
90、所述预处理后的结合概率图mapdd-1*,表示为一个mapx×mapy的概率矩阵bdd-1*;
91、所述本次迭代计算对应的结合概率图mapdd,表示为一个mapx×mapy的概率矩阵bdd;
92、则所述基础先验目标概率图与所述预处理后的结合概率图mapdd-1*的结合,表示为:
93、bdd=a+bdd-1*。
94、进一步的,提供一个优选实施方式,其技术方案如下:
95、所述步骤s4.3具体包括:
96、s4.1、根据所述所述自主水下航行器初始位置,以及过去每一次迭代计算获得的所有对应航点,获取自主水下航行器当前状态;
97、s4.2、根据所述本次迭代计算对应的结合概率图mapdd,计算以所述自主水下航行器当前状态为出发点,在一个时间窗口t内所能获得的最优折扣收益,作为所述自主水下航行器当前状态的价值,表示如下:
98、
99、其中,代表自主水下航行器在一个时间窗口t内经过的航点坐标,ε代表折扣因子,代表从z状态出发第l步探索第pz+l-1栅格所获得的收益,代表pz+i-1的邻域集合,代表的航向角;
100、s4.3、对所述自主水下航行器当前状态的价值进行整数优化,获得本次迭代计算对应的航点z*,表示为;
101、
102、其中,na代表自主水下航行器当前状态可选择的下一个航点的集合;
103、s4.4、根据所述本次迭代计算对应的航点z*,进行探测,获得探测信息;
104、s4.5、根据所述探测信息,更新所述基础先验目标概率图;具体地:
105、在所述基础先验目标概率图中,所述航点z*在探测前的目标存在概率值为则在探测后所述航点z*的目标存在概率值更新为其中,gs∈(0,1],gs为观测概率。
106、本发明还提出了基于改进glasius仿生神经网络的静态目标搜索装置,其技术方案如下:
107、所述装置具体包括:
108、信息采集模块,用于获取预先采集的先验信息;
109、基础概率图处理模块,用于利用帕森窗理论,根据所述先验信息,建立一个尺寸为mapx×mapy的栅格地图,作为基础先验目标概率图;
110、矩阵概率图处理模块,用于根据所述先验信息,获得基于贝叶斯高斯混合矩阵的先验目标概率图;所述基于贝叶斯高斯混合矩阵的先验目标概率图的尺寸为mapx×mapy;将所述基于贝叶斯高斯混合矩阵的先验目标概率图作为初始结合概率图map0;
111、搜索任务模块,用于采用改进glasius仿生神经网络,根据所述先验信息、基础先验目标概率图以及初始结合概率图map0,进行迭代计算以执行静态目标搜索任务。
112、本发明还提出了一种电子设备,其技术方案如下:
113、一种电子设备,包括:处理器和存储器,所述存储器用于存储所述处理器的可执行指令,所述处理器配置为经由执行所述可执行指令来执行权利要求1-8任意一项权利要求所述的方法。
114、本发明有以下有益效果:
115、1、本发明所述的基于改进glasius仿生神经网络的静态目标搜索方法通过引入贝叶斯高斯混合矩阵对概率地图进行聚类,从而提取出概率峰值区域;所述贝叶斯高斯混合矩阵,不依赖人工对于集群数目的判断,能够为不必要的集群赋予等于或接近于0的权重,即自动消除不必要的集群,从而实现更好的聚类效果。
116、2、本发明所述的基于改进glasius仿生神经网络的静态目标搜索方法通过采用结合概率图能够为auv提供更准确的环境信息,使得auv更快地找到最优路径,提高搜索效率。
117、3、本发明所述的基于改进glasius仿生神经网络的静态目标搜索方法采用所述改进的glasius仿生神经网络,通过最大池化和多次卷积,提升了神经网络中全局信息的传播速度,有效降低时延和衰减对gbnn的影响,能更好地掌控全局信息。
118、4、本发明所述的基于改进glasius仿生神经网络的静态目标搜索方法通过所述时域滚动优化过程,相较于传统gbnn中只通过使用贪心策略选取下一个航点的方法,能够得出质量更高的路径。
119、本发明所述的基于改进glasius仿生神经网络的静态目标搜索方法与装置,适用于水下自主航行器的路径规划。
- 还没有人留言评论。精彩留言会获得点赞!