基于生物正负反馈的有人机/无人机共融区域搜索控制方法
本发明公开了一种基于生物正负反馈的有人机/无人机共融区域搜索控制方法,属于人机混合集群自主搜索控制。
背景技术:
1、近年来,无人机发展迅速,作为新型作战力量,已经从传统的侦察监视、水文气象等信息支援和信息保障领域,不断地渗透到各行各业当中,在跟踪、定位、遥控、遥测和数字传输方面能够承担着更加重要的任务。
2、通常无人机协同区域搜索问题是弱智能体之间的协同,而有人机/无人机协同区域搜索是强智能体和弱智能体之间的协同,传统的无中心分布式控制模式,需要无人机具有很强的独立计算、分析和决策能力和自主控制能力。这种策略在当下无人机的自主能力不高的情况下是难以现实的。考虑有人机位于集群空间状态的核心对其忠诚僚机的无人机进行指令控制,实现一名操作员对多架无人机的异构集群。虽然无人机技术在不断的完善,但是无人机仍存在着“固有缺点”,在进行单机作战的时候还不能满足高动态对抗的自主能力条件,且面临着很大的危险。因此,具备简洁高效的人在回路中进行干预控制,通过指令控制的有人机/无人机作战平台是实现协同作战的基础。
3、无人机协同区域搜索因其及时发现未知区域内的待救援目标,为后续救援人员提供目标位置,已经成为重要的研究内容。无人机的区域覆盖搜索算法,现多采用启发式的算法进行求解。常见的有基于启发式的覆盖算法、基于信息素的多无人机覆盖算法以及基于蚁群、粒子群等群智能算法的多无人机覆盖算法。然而,这些算法能在一定程度上提升覆盖率,但是算法的计算量比较大,且受群体数量众多的影响,没有充分实现群体之间互相分工合作的分布式特点,因此需要确定无人机之间的交互规则和交互方式,使得无人机群能够快速有效的创建信息完备的地图。为此,一种新的基于生物启发神经网络搜索模型被引入去表示覆盖过程中的环境状态信息,这种激发与抑制的生物正负反馈模型在区域覆盖的时候能使得无人机在未知区域中快速与环境和无人机群之间进行交互,较完整的利用和创建地图信息。刺激响应模型是一种基于生物学启发的计算模型,用于描述复杂系统中个体的集体行为,该模型以蚂蚁群营为例,将蚂蚁的信息获取,传递和利用过程抽象为一个具有四个元素的简单模型:信息源、信息素、反馈机制和临界阈值。这个模型揭示了群体行为的产生机制,即通过个体之间的信息传递和调节,实现整体的协调和适应性。
4、针对无人机异构集群在离散空间下的控制过程,经典控制方法在实际工程中,由于较难处理非线性、多约束、不确定和时变的控制系统,故而往往难以取得令人满意的结果。模型预测控制(model predictive control,mpc)方法是基于模型的预测、滚动优化以及前馈-反馈的控制结构在每一个离散时间,根据获得的当前测量信息,求解一定时域范围内的优化解,并通过得到的控制序列的第一元素作用于被控对象;在下一个采样时刻,重复上述过程,用新的测量值作为此时预测系统未来动态的初始条件,刷新问题进行求解。
5、综上所述,为了在未知目标和环境信息的条件下,有人机通过集群空间状态指令引导无人机通过生物激发抑制模型在环境未知的情况进行区域搜索,提高搜索效率和环境自适应性成为现有技术亟待解决的问题。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种基于生物正负反馈的有人机/无人机共融区域搜索方法,其目的是为了在未知目标和环境信息的条件下,有人机通过集群空间状态指令引导无人机通过生物激发抑制模型在环境未知的情况进行区域搜索,提高搜索效率和环境自适应性。
2、本发明的一种基于生物正负反馈的有人机/无人机共融区域搜索控制方法,包括:
3、步骤一:搭建有人机/无人机异构集群空间模型
4、基于每架无人机配置的空速、航向与航迹三通道自动驾驶仪中所包含三个平移自由度与两个旋转自由度,建立无人机的等效二阶系统动力学模型,利用无人机在大地坐标系下的个体状态变量,以及无人机与有人机之间的空间构型建立集群坐标系下的集群空间状态模型。
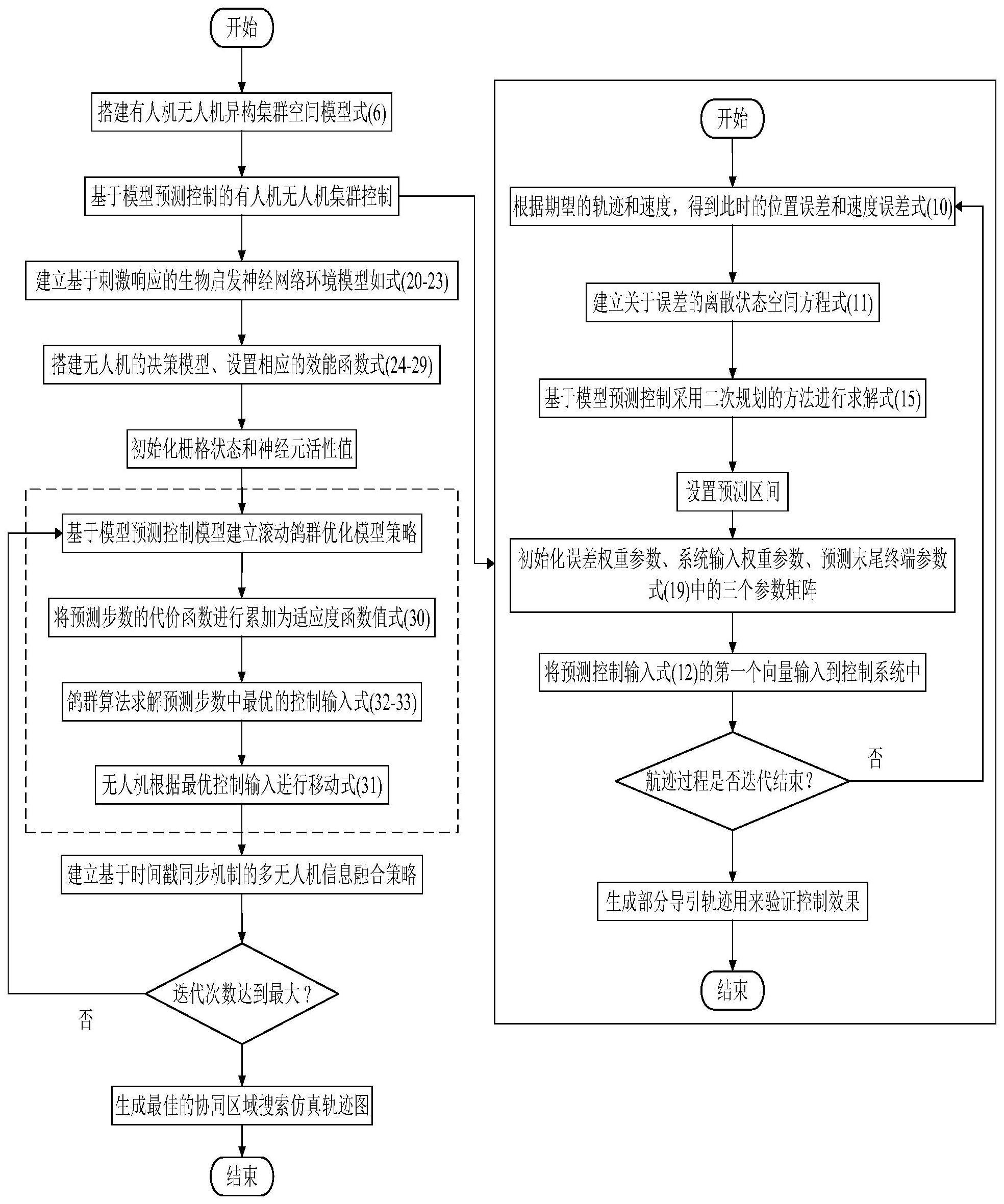
5、步骤二:基于模型预测控制的有人机/无人机集群控制
6、以集群空间状态的位置误差和速度误差为基础建立状态空间方程,并采用模型预测控制进行控制。
7、步骤三:建立基于刺激响应的生物启发神经网络环境模型
8、通过无人机的视场角范围、周围关联神经元的数量、环境因素产生的阈值效应模型以及栅格地图环境信息的抑制和激发建立环境模型。
9、步骤四:搭建无人机的决策模型并且设置相应的效能函数
10、无人机的决策模型主要由无人机移动角度为控制输入建立的,并通过对具有覆盖神经元活性值收益、转弯角度以及威胁碰撞来设置覆盖搜索效能函数。
11、步骤五:基于模型预测控制模型建立滚动鸽群优化模型策略
12、根据栅格地图的神经活性值计算出搜索代价函数的值,在预测区间内通过对l步进行预测,在多次l步的预测过程中,需要对搜索效益最大的一次预测进行挑选,建立滚动鸽群优化模型。
13、步骤六:建立基于时间戳同步机制的多无人机信息融合策略
14、利用每架无人机的生物栅格神经元活性值地图和时间戳地图来同步多无人机之间的信息融合。
15、步骤七:输出生物正负反馈的有人机/无人机共融区域搜索控制结果图
16、通过判断迭代时间是否达到最大迭代时间,如果达到,则跳出循环,输出有人机/无人机模型预测控制结果以及生物正负反馈搜索神经元活性值地图,否则,继续进行迭代优化过程,对整片区域进行搜索。
17、上述方案进一步的所述步骤一的搭建有人机/无人机异构集群空间模型为:
18、
19、式中:[x1,x2,x3,y1,y2,y3,z1,z2,z3]分别表示3架无人机个体状态变量在大地坐标系下的位置坐标,[χ1,χ2,χ3,γ1,γ2,γ3]表示3架无人机个体在大地坐标系下的平移和旋转姿态,[xc,yc,zc,χc,γc]表示集群空间{c}相对于大地坐标系下的参数值,也就是有人机在空间中的位置以及平移、旋转姿态,此处的下标c代表集群中心的含义,(χc1,χc2,χc3)和(γc1,γc2,γc3)表示无人机个体在集群坐标系下的旋转姿态变量,{p,q,α,β}的值决定了无人机集群的构型,p,q表示的是控制集群构型前向跟随距离的变量,α表示的是集群俯仰指令角,β表示的是控制集群构型横向跟随距离的变量,g1,g2...,g15代表着无人机个体状态变量r与集群空间状态变量c内部变量的函数关系,(h,l,d)表示计算过程的中间向量,(pc,p1,p2,pc,p1,p2)代表的是计算过程中坐标点。
20、所述步骤二基于模型预测控制的有人机/无人机集群控制包括
21、uk=[u(k|k),u(k+1|k),...,u(k+i-1|k),u(k+n-1|k)]t (12)
22、其中,k表示的是采样时刻,u(k)为输入向量。
23、所述步骤三建立基于刺激响应的生物启发神经网络环境模型包括:
24、基本的刺激响应模型
25、
26、其中,i,j是分别表示无人机和神经元的个数,xj为生物神经元j的刺激程度,为无人机i的响应阈值,xk为神经元j相关联的其他神经元的刺激程度,m为相关联其他神经元的数目,t(xj)为此时无人机i执行任务xj的概率。
27、和生物启发神经网络模型
28、
29、其中,h是第i个神经元具有联系的关联神经元个数。和分别表示激发和抑制输入。为神经元i相邻的神经元j的活性值。均为正值常数,为的衰减速率,和分别为的上下限值,即
30、所述步骤四搭建无人机的决策模型并且设置相应的效能函数包括:
31、无人机ri的下一状态可表示为
32、
33、其中,和分别表示位置、速度以及当前移动方向与横轴正方向的夹角,下标ri表示的无人机的序号,为正整数。
34、组合后的协同区域搜索代价函数为
35、f(k)=α1fe(k)+α2fs(k)+α3fc(k) (29)
36、其中,α1、α2、α3为不同代价函数对应的权重系数,fe神经元栅格图激励代价函数、fs转弯角度限制代价函数以及fc碰撞风险规避代价函数。
37、所述步骤五基于模型预测控制模型建立滚动鸽群优化模型策略包括:
38、在预测区间内通过对l步进行预测,并且将每一步的代价函数f累加,得到对所有无人机l步的代价函数值之和表示为
39、
40、每次通过预测l步计算其代价函数值以后,确定此时的控制输入
41、{um(k),um(k+1),um(k+2),...,um(k+l-1)} (31)
42、将其中第一个输入值作用于无人机群当中。
43、在多次l步的预测过程中,需要对搜索效益最大的一次预测进行挑选,考虑鸽群优化pio在参数设计简单、迭代速度快以及全局寻优能力强的特点。选择pio进行优化求解。
44、步骤六:建立基于时间戳同步机制的多无人机信息融合策略
45、当无人机之间进行信息交互的时候,由于当前的生物栅格神经元活性地图的活性值判断不仅与当前的无人机有关,还与范围内其他无人机的探测得到的活性值有关,因此每架无人机在实施搜索过程不仅要维护一个生物栅格神经元活性值地图还需要维护一个时间戳地图来同步信息交流过程。设时间戳为ti,c,表示无人机i对栅格c的最近一次更新的搜索地图更新。
46、步骤七:输出生物正负反馈的有人机/无人机共融区域搜索控制结果图
47、判断迭代时间是否达到最大迭代时间kmax,如果达到,则跳出循环,输出有人机/无人机模型预测控制结果以及生物正负反馈搜索神经元活性值地图,否则,继续进行迭代优化过程,对整片区域进行搜索。
48、上述方案更进一步的
49、所述步骤一中,假设每架无人机配置了空速、航向与航迹三通道的自动驾驶仪,包含三个平移自由度与两个旋转自由度,建立无人机的等效二阶系统动力学模型如下:
50、
51、同时考虑无人机实用性约束:
52、
53、式中:步骤一中提到的所有i为正整数,指代第i架无人机,为无人机i的三个轴向的速度,vi、χi和γi分别为水平速度,航向角和高度变化率,vic、和分别为自动驾驶仪3个回路上的控制输入,其中上标c代表控制的含义,τv,τχ和τλ分别为3个时间常数,vmax,vmin,nmax和γmax均大于0,分别为最大速度、最小水平速度、最大横向过载和最大高度变化率,γmin为最小高度变化率,且小于0,g为重力加速度取为9.8m/s2。
54、将无人机个体状态变量在大地坐标系下{g}表示为:
55、r=[x1,x2,x3,y1,y2,y3,z1,z2,z3,χ1,χ2,χ3,γ1,γ2,γ3]t (3)
56、式中:[x1,x2,x3,y1,y2,y3,z1,z2,z3]分别表示3架无人机个体状态变量在大地坐标系下的位置坐标,[χ1,χ2,χ3,γ1,γ2,γ3]分别表示3架无人机个体在大地坐标系下的平移和旋转姿态。
57、建立集群坐标系下{c}的集群空间状态变量如下
58、c=[xc,yc,zc,χc,γc,χc1,χc2,χc3,γc1,γc2,γc3,p,q,α,β]t (4)
59、式中:[xc,yc,zc,χc,γc]表示集群空间{c}相对于大地坐标系下的参数值,也就是有人机在空间中的位置以及平移、旋转姿态,此处的下标c代表集群中心的含义,(χc1,χc2,χc3)和(γc1,γc2,γc3)表示无人机个体在集群坐标系下的旋转姿态变量,{p,q,α,β}的值决定了无人机集群的构型,p,q表示的是控制集群构型前向跟随距离的变量,α表示的是集群俯仰指令角,β表示的是控制集群构型横向跟随距离的变量。
60、基于上述无人机个体状态变量r与集群空间状态变量c的选取,建立其运动学转换关系,g1,g2...,g15代表着无人机个体状态变量r与集群空间状态变量c内部变量的函数关系,kin(·)代表着这两个变量转换的函数。
61、
62、其中,(h,l,d)表示计算过程的中间向量,(pc,p1,p2,pc,p1,p2)代表的是计算过程中坐标点。
63、
64、考虑无人机个体速度变量与集群空间速度变量之间的关系,jr表示个体状态变量导数与集群空间状态变量导数之间进行转换的雅克比矩阵。
65、
66、其中,
67、
68、对式(1)模型中无人机位置进行二阶微分可得相关的二阶系统控制输入如下
69、
70、所述步骤二中,将集群空间状态的位置误差和速度误差表示为ei=ci-cd和得到关于误差的离散状态空间方程:
71、
72、即
73、
74、其中,δt为采样时间,k表示的是采样时刻,u(k)为输入向量,x(k)∈rn为系统变量,a,b为系统的系数矩阵。通过该误差的状态空间方程建立模型预测控制模型mpc。为系统在一次迭代过程中产生e(0),控制输入序列在有限的时间内能够让位置误差和速度误差收敛为0。
75、设从k时刻开始,系统的输入为
76、uk=[u(k|k),u(k+1|k),...,u(k+i-1|k),u(k+n-1|k)]t (12)
77、其中,n表示的是预测区间。
78、mpc对系统状态量的预测表示为
79、xk=[x(k|k),x(k+1|k),x(k+2|k),...,x(k+n|k)]t (13)
80、在这个状态方程中,由于是将误差作为状态变量,因此参考值r为0,系统的输出y=x。考虑到mpc问题采用二次规划的方法进行求解,则一般形式为
81、
82、因此,此时的代价函数考虑误差的加权和、系统输入的加权以及预测末尾的终端误差表示为
83、
84、根据式(12)和(13)离散状态空间表达式,列出x(k)中各个状态的表达式如下
85、化简可得
86、
87、即
88、xk=mxk+cuk (18)
89、根据式(15)和(18)进行矩阵化简得到
90、
91、其中令误差权重参数矩阵输入权重参数矩阵预测末尾终端参数矩阵
92、所述步骤三中,每架无人机个体映射为蚂蚁个体,区域的刺激抑制强度映射为区域此时的状态,每架无人机自身存在一个固定的响应阈值,通过无人机之间的距离以及周围个体的数量以及栅格地图环境信息的抑制和激发。基本的刺激响应模型如下
93、
94、其中,i,j是分别表示无人机和神经元的个数,xj为生物神经元j的刺激程度,为无人机i的响应阈值,xk为神经元j相关联的其他神经元的刺激程度,m为相关联其他神经元的数目,t(xj)为此时无人机i执行任务xj的概率。
95、在决策阶段,每一架无人机被假设成一个全方位360°视角能力但具有最大转弯限制角θmax和最小转弯限制角θmin的智能体,并且能够在一定的范围lmax内进行通信,首先对区域搜索环境二维栅格化,然后在栅格地图上建立二维平面的生物启发神经网络模型,每一个栅格交点代表一个生物神经元且都有与之相对应的神经元活性值,在范围lmax内将对其他生物神经元造成刺激和抑制影响,其中nc代表当前的生物神经元,na代表与当前生物神经元具有联系的关联生物神经元,ne代表与当前生物神经元不具有联系的生物神经元。此时生物启发神经网络模型为
96、
97、其中,h是第i个神经元具有联系的关联神经元个数。和分别表示激发和抑制输入。为神经元i相邻的神经元j的活性值。均为正值常数,为的衰减速率,和分别为的上下限值,即同一层中神经元i与神经元j之间的连接权重称为侧向连接权重,表示为
98、
99、其中,|pi-pj|指的是两个神经元之间的距离,a与rn都是正的常数。
100、栅格地图中每个栅格格点会有三种状态,这三种状态将会直接影响该栅格格点的神经元活性值分别是:未搜索、已搜索以及障碍物,这三种状态通过状态标志位来表示
101、
102、其中,s(gi)表示的是栅格地图中,第i个栅格顶点的状态。当栅格顶点未被搜索的时候,s(gi)=1。当栅格顶点被搜索过,s(gi)=0。当栅格顶点处有障碍物的时候,s(gi)=-1。
103、所述步骤四中,在顶层决策规划的过程中,无人机被简化为立即改变移动方向并且以恒定的速度向前移动,而并不需要考虑加速度或其他复杂因素。无人机ri的下一状态表示为
104、
105、其中,和分别表示位置、速度以及当前移动方向与横轴正方向的夹角,下标ri表示的无人机的序号,为正整数。为了去更有效的搜索未知区域,每一架无人机将会在给定的最小角度θmin的基础上进行倍数的累加,公式表示为
106、θri(t+1)=θri(t)±εθmin (25)
107、其中ε为区间中的正整数。
108、设计的覆盖搜索效能函数,主要目的是为了引导无人机向未覆盖的区域进行搜索,在搜索的过程中对具有一定的转弯角度限制条件,以及可能存在的碰撞风险,因此将会考虑涉及神经元栅格图激励代价函数fe、转弯角度限制代价函数fs以及碰撞风险规避代价函数fc。
109、无人机向神经元活性值较高的区域进行运动,因此神经元活性值增量收益为无人机每走一步所覆盖的范围内的神经元活性值之和表示为
110、
111、其中,为无人机当前覆盖范围内的第l个栅格点。ω为无人机在当前位置上能够覆盖的栅格点的数目。
112、无人机在进行运动的时候,角度转弯过大会造成对无人机能量的过度消耗,因此在此设计转弯代价函数表示为
113、
114、其中,θmax为各个无人机的最大转弯限制角。
115、无人机在运动过程中,需要与其他的无人机之间根据判断威胁距离lmax进行避障,在通信范围lmax内有h个机器人时,建立碰撞代价函数为
116、
117、其中,lcr表示当前无人机与覆盖范围内其他无人机之间的距离。
118、根据对代价的不同的权重的设计,侧重的考虑三种因素对无人机协同区域搜索的影响,从而提高整个协同区域搜索算法的适应性,因此组合后的协同区域搜索代价函数为
119、f(k)=α1fe(k)+α2fs(k)+α3fc(k) (29)
120、其中,α1、α2、α3为不同代价函数对应的权重系数。
121、所述步骤五中,根据式(20)和(28),栅格地图的神经活性值随着无人机的运动而发生变化,从而计算出搜索代价函数的值,因为滚动预测的特点,在预测区间内通过对l步进行预测,并且将每一步的代价函数f累加,得到对所有无人机l步的代价函数值之和表示为
122、
123、每次通过预测l步计算其代价函数值以后,确定此时的控制输入
124、{um(k),um(k+1),um(k+2),...,um(k+l-1)} (31)
125、将其中第一个输入值作用于无人机群当中。
126、在多次l步的预测过程中,需要对搜索效益最大的一次预测进行挑选,考虑鸽群优化pio在参数设计简单、迭代速度快以及全局寻优能力强的特点,选择pio进行优化求解。
127、步骤六:建立基于时间戳同步机制的多无人机信息融合策略
128、当无人机之间进行信息交互的时候,由于当前的生物栅格神经元活性地图的活性值判断不仅与当前的无人机有关,还与范围内其他无人机的探测得到的活性值有关,因此每架无人机在实施搜索过程不仅要维护一个生物栅格神经元活性值地图还需要维护一个时间戳地图来同步信息交流过程。设时间戳为ti,c,表示无人机i对栅格c的最近一次更新的搜索地图更新。
129、步骤七:输出生物正负反馈的有人机/无人机共融区域搜索控制结果图
130、判断迭代时间是否达到最大迭代时间kmax,如果达到,则跳出循环,输出有人机/无人机模型预测控制结果以及生物正负反馈搜索神经元活性值地图,否则,继续进行迭代优化过程,对整片区域进行搜索。
131、另外在上述方案中,所述步骤五中的pio算法有以下四个步骤:
132、1)初始化
133、初始化鸽群的种群个数为p,解空间的维数d,地图和指南针因子r,以及迭代次数nc1和nc2。
134、2)地图和指南针算子
135、根据初始化的鸽群算法参数,代入到地图和指南针算子中,该算子迭代公式如下:
136、
137、式中,第i只鸽子的位置表示为xi,速度表示为vi,r为地图和指南针参数,t表示的是迭代的次数,rand为[0,1]间的随机数,xg表示的是全局最优的位置,当t达到迭代次数nc1时跳出地图和指南针算子,式(30)为迭代过程的适应度函数f(xit)。
138、3)地标算子
139、根据初始化的鸽群算法参数,将跳出地图和指南针算子的参数地标算子xit以及适应度函数值f(xit),代入到地标算子中,该算子的迭代公式如下:
140、
141、式中,np表示的是种群的个体数目,t表示的是迭代的次数,xc表示每次迭代之后中心鸽子的位置,xi表示的是第i只鸽子的位置,f(xi)表示的是xi此时的适应度函数即式(29),rand是[0,1]上的随机数,当t达到迭代次数nc2时跳出地标算子。
142、4)循环。所有粒子通过经过初始化、地图和指南针算子和地标算子在边界范围内进行迭代,直到最大的代数,每次通过预测l步计适应度函数值后,取得其最优的控制输入um即式(33),并将其第一个分量um(k)作用于无人机,最终实现搜索效能覆盖最大化。
143、{um(k),um(k+1),um(k+2),...,um(k+l-1)} (33)。
144、所述步骤六中设置如下三条规则来更新时间戳地图。
145、1)当无人机对当前栅格进行搜索时,此时时间戳的更新来自于本身的行为,更新此时搜索栅格c时间戳ti,c为当前更新的时刻数。
146、2)当无人机对当前栅格的搜索更新的生物栅格神经元活性值地图来自通信范围内的多架无人机的信息融合时,则当前搜索栅格c时间戳更新为离当前时刻最近的时间戳。
147、3)当前无人机范围内有其他无人机的时候,需要进行信息交互,此时交互的不仅仅是生物栅格神经元活性值地图,而且也会更新为当前最新的时间戳地图。
148、在整个无人机系统中,其他区域选择置信通信范围内(包括本机)最新的时间戳所代表的活性值地图结果,以此避免无人机重复访问一些已经确定下来的网格区域。
149、本发明是基于生物正负反馈模型预测控制的有人机/无人机共融区域搜索方法,其优点及功效在于:一、提供了有人机依靠简单的指令通过mpc实现对无人机操控的稳定控制,降低了有人机操作员的负荷,提供了一种稳定的忠诚僚机框架结构;二、提出了一种基于生物正负反馈机制建立栅格地图的方式,提高了无人机对环境的感知能力,减少了无人机机间避碰的概率,具有一定的环境适应性;三、具有分布式优化求解的特点,减少了搜索范围内出现重复搜索的情况,优化算法也能够进行较快收敛,提升覆盖效率。
- 还没有人留言评论。精彩留言会获得点赞!