一种农业机械用分苗装置的远程操作控制系统与方法与流程
本发明属于分苗领域,更具体的,涉及一种农业机械用分苗装置的远程操作控制系统与方法。
背景技术:
1、通常,农作物在生长时,需要通过分苗增强农作物营养,增加光照面积,从而扩大农作物的最终产量。然而,目前市场上的分苗是通过人工处理,或者是通过机器简单的无差别的处理。这些方式都容易对农作物的根部造成损伤,例如,分苗的切割过程有可能使得农作物断根,从而影响农作物正常生长。
2、现有技术文件1(基于视觉伺服的蝴蝶兰种苗切割系统设计与试验,翟永杰)公开了一种基于视觉伺服的蝴蝶兰种苗切割系统,该系统根据种苗自身特性,对种苗进行自动识别并计算待切割位置,驱动切割执行机构完成切割作业。然而,该现有技术文件1采用了拟合直线+判断切割点的方法,过于繁琐,不适用于工业生产中廉价高效的切割模式。
技术实现思路
1、为解决现有技术中存在的不足,本发明巧妙了利用了线激光器发射结构光条纹寻找分苗线,从而代替不断的寻找切割点,在维持精准度的同时极大提高了工作效率,进而提出一种农业机械用分苗装置的远程操作控制方法与系统。
2、本发明采用如下的技术方案。
3、本发明第一方面公开了一种农业机械用分苗装置的远程操作控制方法,该方法包括步骤1~步骤5;
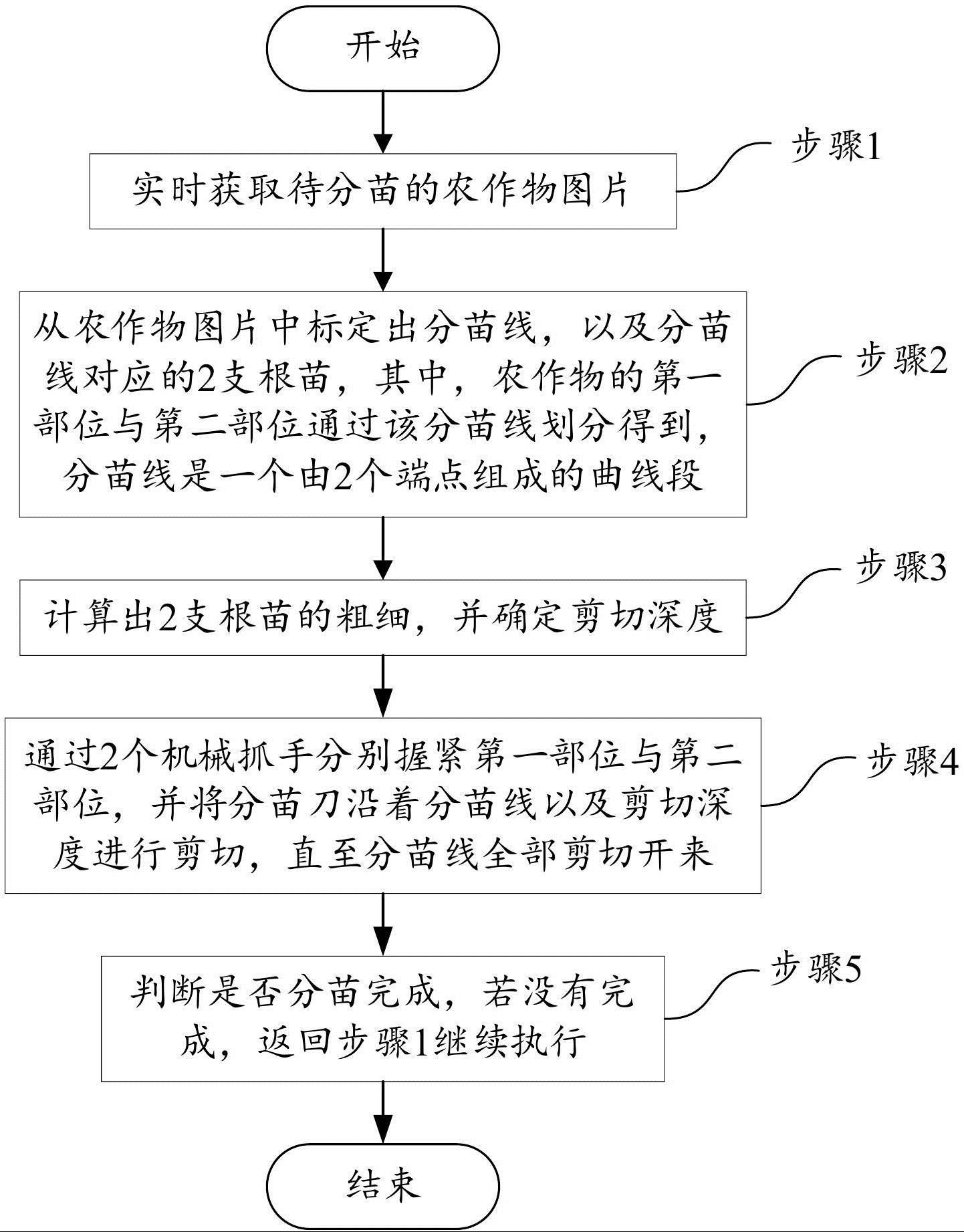
4、步骤1,实时获取待分苗的农作物图片;
5、步骤2,从农作物图片中标定出分苗线,以及分苗线对应的2支根苗,其中,农作物的第一部位与第二部位通过该分苗线划分得到,分苗线是一个由2个端点组成的曲线段;
6、步骤3,计算出2支根苗的粗细,并确定剪切深度;
7、步骤4,通过2个机械抓手分别握紧第一部位与第二部位,并将分苗刀沿着分苗线以及剪切深度进行剪切,直至分苗线全部剪切开来;
8、步骤5,判断是否分苗完成,若没有完成,返回步骤1继续执行。
9、本发明第二方面公开了一种农业机械用分苗装置的远程操作控制系统,包括:分苗装置与用户处理终端;其中,分苗装置包括:分苗刀、图像采集模块与2个机械抓手;
10、图像采集模块用于实时获取待分苗的农作物图片,并将该农作物图片传给用户处理终端;
11、用户处理终端用于从农作物图片中标定出分苗线,以及分苗线对应的2支根苗,其中,农作物的第一部位与第二部位通过该分苗线划分得到,分苗线是一个由2个端点组成的曲线段;以及计算出2支根苗的粗细,并确定剪切深度;以及判断是否分苗完成;
12、2个机械抓手分别用于握紧第一部位与第二部位;
13、分苗刀用于沿着分苗线以及剪切深度进行剪切,直至分苗线全部剪切开来。
14、本发明的有益效果在于,与现有技术相比,本发明具有以下优点:
15、(1)本发明通过图像处理模块,获取农作物的分苗线,并结合激光发射结构光条纹,既防止在分苗过程中破坏农作物的根部,也极大的提高了工作效率。此外,在一次分苗过程中,本发明并非是现有技术中的一刀切模式,而是多次迭代,即多次确定农作物的新的分苗线,可以实现对农作物的零破坏。
16、(2)本发明还通过简化样本输入以及增强样本特征等手段,极大的减少了深度学习算法中对样本的需求量,从而更快的实现远程控制操作到自动化操作的过渡。
技术特征:
1.一种农业机械用分苗装置的远程操作控制方法,其特征在于,所述方法包括步骤1~步骤5;
2.根据权利要求1所述的一种农业机械用分苗装置的远程操作控制方法,其特征在于,步骤1具体包括步骤1.1~步骤1.3;
3.根据权利要求2所述的一种农业机械用分苗装置的远程操作控制方法,其特征在于,步骤2中,从农作物图片中标定出分苗线,具体包括步骤s21~s23;
4.根据权利要求2所述的一种农业机械用分苗装置的远程操作控制方法,其特征在于,步骤2中,从农作物图片中标定出分苗线,具体包括:计算出每一个样本图片的亮度差值矩阵;以亮度差值矩阵作为训练样本,以样本图片中的分苗线作为预测值;将所有训练样本与对应的预测值共同输入至深度学习网络中进行训练,得到分苗线预测模型;再次计算出待分苗的农作物图片的亮度差值矩阵,输入至深度学习网络中并输出分苗线,并对输出的该分苗线进行标定;其中,亮度差值矩阵通过步骤a21~a22计算得到;
5.根据权利要求1所述的一种农业机械用分苗装置的远程操作控制方法,其特征在于,剪切深度如下所示:
6.根据权利要求1所述的一种农业机械用分苗装置的远程操作控制方法,其特征在于,步骤4中,将分苗刀沿着分苗线以及剪切深度进行剪切,直至分苗线全部剪切开来,具体包括步骤4.1~步骤4.2;
7.根据权利要求1所述的一种农业机械用分苗装置的远程操作控制方法,其特征在于,步骤5中,判断是否分苗完成,可以具体包括:将2个机械抓手按照相反方向以预设的力度进行拉扯,若农作物的第一部位与第二部位物理分开,则判定为分苗完成,否则判定为分苗未完成。
8.一种农业机械用分苗装置的远程操作控制系统,运用在权利要求1-7任一所述的方法上,其特征在于,所述系统包括:分苗装置与用户处理终端;其中,分苗装置包括:分苗刀、图像采集模块与2个机械抓手;
9.根据权利要求8所述的一种农业机械用分苗装置的远程操作控制系统,其特征在于,所述系统中图像采集模块包括:相机与线激光器;
技术总结
一种农业机械用分苗装置的远程操作控制方法,包括:步骤1,实时获取待分苗的农作物图片;步骤2,从农作物图片中标定出分苗线,以及分苗线对应的2支根苗;步骤3,计算出2支根苗的粗细,并确定剪切深度;步骤4,通过2个机械抓手分别握紧第一部位与第二部位,并将分苗刀沿着分苗线以及剪切深度进行剪切,直至分苗线全部剪切开来;步骤5,判断是否分苗完成,若没有完成,返回步骤1继续执行。本发明通过图像处理模块,获取农作物的分苗线,防止在分苗过程中破坏农作物的根部。此外,在一次分苗过程中,本发明并非是现有技术中的一刀切模式,而是多次迭代,即多次确定农作物的新的分苗线,可以实现对农作物的零破坏。
技术研发人员:孙晓悦
受保护的技术使用者:孙晓悦
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!