飞行器的拉平模式控制方法、系统、存储介质及终端设备与流程
本发明涉及飞行器的自动着陆拉平导引,尤其涉及一种飞行器的拉平模式控制方法、系统、存储介质及终端设备。
背景技术:
1、民机的进近着陆阶段是事故多发阶段,也是最复杂的飞行阶段。由于这一阶段飞行高度低,环境复杂,所以对飞行器安全的要求也最高,尤其在终端进近时,飞行器的所有状态都必须高精度保持,直到准确地在一个规定的点上接地。根据easa的cs-awo中的条款要求,飞机的着陆接地点纵向距离在距离跑道入口60m以内的概率不超过10-5,接地点超过距离跑道入口823m的概率不超过10-6,飞机接地时的外侧起落架距离跑道中心线的距离超出21m的概率不超过10-5,且落地时的下沉率,即垂直速度不能超过极限载荷。
2、自动拉平功能是三类着陆应具备的基本功能,三类着陆是飞行器在三类极限天气情况下自动完成精密进场着陆,为了提高飞行安全,减少飞行员工作负荷,目前世界上先进民用机型均具备三类自动着陆的能力,其中iiia着陆的决断高度低于30m(100ft)或无决断高度,跑道视距不小于200m(700ft)。icao iiia级自动进场着陆模态的自动控制系统用于控制飞行器沿进场直至主起落架接地的轨迹飞行,当主起落架的轮胎接触跑道地面或复飞开始时,就认为拉平功能结束了,飞行器利用自动拉平系统完成自动着陆,飞行员在飞行器接地后接管对飞行器的控制。自动拉平的实现方法应该最大程度的接近人工操纵飞行器着陆的方法并要考虑下列要求:
3、a)接通自动拉平功能应该是平滑的,不应该存在可能会导致俯冲的控制信号的跳变。
4、b)高度、垂直速度和俯仰角的过渡过程应该是单调的。
5、c)飞行器进入跑道中心线的过程在水平面上应该是接近非周期的过程。
6、d)着陆航向偏差在落地时不应超过3°。
7、拉平模式是飞行器进行控制模式及逻辑转换的关键环节,不仅是控制方法的转变,也是对飞行安全产生重大影响的关键环节。因此对自动拉平控制系统设计的精度要求是非常高的。拉平阶段时间通常很短,这一时间内,自动驾驶系统没有太多的时间进行修正,因此,需保证其控制的精准度,安全性及乘客的舒适性,需要亟待解决拉平轨迹不平稳、速度控制不精确进而不能保证飞机柔和接地的问题,以及在极端气象条件下抗风干扰能力有待提高。
技术实现思路
1、本发明提供了一种飞行器的拉平模式控制方法、系统、存储介质及终端设备,能够有效解决目前飞行器在拉平模式下拉平轨迹不平稳、速度控制不精确以及在极端气象条件下不能保证飞机柔和接地的问题。
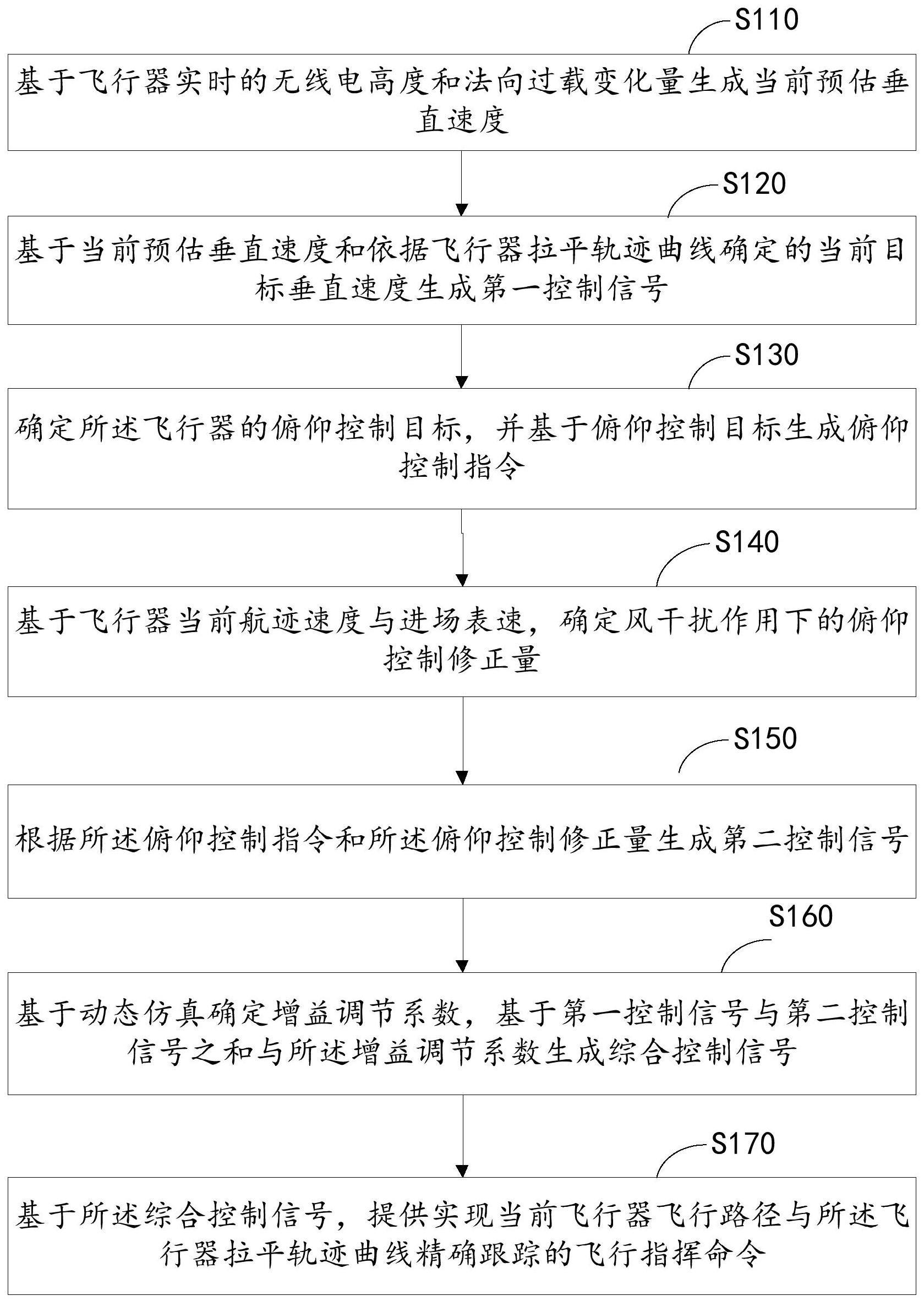
2、根据本发明的一方面,提供一种飞行器的拉平模式控制方法,所述方法包括:基于飞行器当前无线电高度和法向过载变化量生成当前预估垂直速度;基于当前预估垂直速度和依据飞行器拉平轨迹曲线确定的当前目标垂直速度生成第一控制信号;确定所述飞行器的俯仰控制目标,并基于俯仰控制目标生成俯仰控制指令;基于飞行器当前航迹速度与进场表速,确定风干扰作用下的俯仰控制修正量;根据所述俯仰控制指令和所述俯仰控制修正量生成第二控制信号;基于动态仿真确定增益调节系数,基于第一控制信号与第二控制信号之和与所述增益调节系数生成综合控制信号,基于所述综合控制信号,提供实现当前飞行器飞行路径与所述飞行器拉平轨迹曲线精确跟踪的飞行指挥命令。
3、进一步地,所述基于飞行器当前航迹速度与进场表速,确定风干扰作用下的俯仰控制修正量,包括:基于飞行器当前航迹速度与进场表速之差,确定第一差值;依据所述第一差值,确定风干扰作用下的所述俯仰控制修正量。
4、进一步地,所述依据所述第一差值,确定风干扰作用下的所述俯仰控制修正量,包括:依据所述第一差值,确定预估俯仰控制修正量;判断所述预估俯仰控制修正量是否超过预设幅值限制参数;当所述预估俯仰控制修正量不超过预设幅值限制参数时,将所述预估俯仰控制修正量作为所述俯仰控制修正量,当判断出所述预估俯仰控制修正量超过预设幅值限制参数时,将所述预设幅值限制参数作为所述俯仰控制修正量。
5、进一步地,所述根据所述俯仰控制指令和所述俯仰控制修正量生成第二控制信号,包括:基于所述俯仰控制指令和所述俯仰控制修正量之和,确定第一加和值;依据所述第一加和值,确定第二控制信号。
6、进一步地,所述确定所述飞行器的俯仰控制目标,并基于俯仰控制目标生成俯仰控制指令,包括:获取所述最大的拉平开始高度,根据所述最大的拉平开始高度和所述飞行器当前无线电高度,确定俯仰控制增益系数;基于俯仰控制增益系数和所述俯仰控制目标,确定俯仰控制指令。
7、进一步地,所述根据所述最大的拉平开始高度和所述飞行器当前无线电高度,确定俯仰控制增益系数,包括:
8、将所述飞行器当前无线电高度记为hra-lg,将所述最大的拉平开始高度记为hflmax,确定所述俯仰控制增益系数为
9、进一步地,所述基于飞行器当前无线电高度和法向过载变化量生成当前预估垂直速度,包括:对所述无线电高度通过第一滤波器进行滤波,得到第一滤波结果;对所述法向过载变化量通过第二滤波器进行滤波,得到第二滤波结果;将所述第一滤波结果和所述第二滤波结果通过预设的一阶惯性环节,生成当前预估垂直速度。
10、进一步地,所述基于当前预估垂直速度和依据飞行器拉平轨迹曲线确定的当前目标垂直速度生成第一控制信号,包括:依据确定当前目标垂直速度,其中为当前目标垂直速度,hra_lg为飞行器起落架最低点到跑道平面的高度,has为拉平轨迹渐近线低于跑道平面的高度,t为拉平起始至接地过程的总时间;
11、依据飞行器拉平轨迹曲线确定目标垂直速度中的时间常数t,包括:基于所述飞行器拉平轨迹曲线确定拉平轨迹渐近线对所述拉平轨迹渐近线进行推导可得
12、t为所述目标垂直速度的时间常数,其中,h(0)为相对于拉平轨迹渐近线的拉平开始高度,hfl(0)为初始拉平时刻所述飞行器相对于跑道平面的拉平高度,vzfl(0)为拉平模式接通时由飞控计算机锁存的垂直速度,vztdgiv为接地时刻的目标垂直速度,该值依据飞行品质要求及飞机极限载荷确定。给定拉平轨迹结束于主起落架轮胎接触跑道表面的时刻。
13、基于所述时间常数t可确定目标垂直速度;
14、基于所述当前预估垂直速度和所述当前目标垂直速度之差,确定第二差值;
15、依据所述第二差值,确定第一控制信号。
16、根据本发明的另一方面,提供一种飞行器的拉平模式控制系统,包括:预估垂直速度生成模块,用于基于飞行器当前无线电高度和法向过载变化量生成当前预估垂直速度;第一控制信号生成模块,用于基于当前预估垂直速度和依据飞行器拉平轨迹曲线确定的当前目标垂直速度生成第一控制信号;俯仰控制指令生成模块,用于确定所述飞行器的俯仰控制目标,并基于俯仰控制目标生成俯仰控制指令;俯仰控制修正量确定模块,用于基于飞行器当前航迹速度与进场表速,确定风干扰作用下的俯仰控制修正量;第二控制信号生成模块,用于根据所述俯仰控制指令和所述俯仰控制修正量生成第二控制信号;综合控制信号生成模块,用于基于动态仿真确定增益调节系数,基于第一控制信号与第二控制信号之和与所述增益调节系数生成综合控制信号,飞行指挥命令提供模块,用于基于所述综合控制信号,提供实现当前飞行器飞行路径与所述飞行器拉平轨迹曲线精确跟踪的飞行指挥命令。
17、根据本发明的另一方面,提供一种存储介质,所述存储介质中存储有多条指令,所述指令适于由处理器加载以执行如上任一飞行器的拉平模式控制方法。
18、根据本发明的另一方面,提供一种终端设备,包括处理器和存储器,所述处理器与所述存储器电性连接,所述存储器用于存储指令和数据,所述处理器用于执行如上任一飞行器的拉平模式控制方法中的步骤。
19、本发明的优点在于,本发明第一控制信号中通过飞行器当前无线电高度和法向过载变化量生成当前预估垂直速度;基于当前预估垂直速度和依据飞行器法向过载变化量共同确定当前预估垂直速度,当前预估垂直速度信号由两个不同的传感器综合产生,且考虑飞行器法向过载变化量对当前预估垂直速度的影响,可以补偿通过无线电高度表得到的垂直速度信号的延迟,且通过设置俯仰控制修正量,对风干扰条件下对拉平模式的影响作出了精准调控,通过第一控制信号,第二控制信号以及基于动态仿真确定的增益调节系数确定的综合控制信号,能够保证对拉平轨迹实现精准控制,以保证拉平过程中的平稳以及飞机的柔和接地,且保证了在极端气象条件下的抗风干扰能力。
- 还没有人留言评论。精彩留言会获得点赞!