基于5G的无人机智能调度系统、方法及应用与流程
本发明涉及基于5g的无人机智能调度系统、方法及应用,属于无人机领域。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,民用方面,无人机+行业应用,是无人机真正的刚需;在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途。
2、目前,大多数的民用无人机应用于农业喷洒以及森林防灾中,由于无人机的续航时间有限,需要经常往返调度基座中进行充电,在众多无人机系统中,特别是在多条线路的交汇点,容易出现多架无人机进入同一基座中进行充电的情况,而通常情况下同一基座只能供一架无人机进行充电,影响了工作效率以及调度基座的利用率。
3、例如:中国发明专利(申请号:cn202110562256.1)所公开的“一种无人机停放系统及无人机停放方法”,其说明书公开:在多无人机系统中,特别在两条线路或多条线路的交汇点处,经常出现两架或两架以上的无人机需要同时停靠在同一个机库内进行充电的情况。一般的机库仅能容纳一个无人机停靠充电,为了解决上述问题,通常在同一区域设置多个机库,但这种解决方法无疑成倍地增加了机库设置的成本,并且正常情况下,多个机库可能只有一个机库被频繁使用,其他机库只有在两架以上无人机需要同时停靠的情况下,才会被使用,机库的利用率较低,也造成了一定程度上的资源浪费;上述专利可以佐证现有技术存在的缺陷。
4、因此我们对此做出改进,提出基于5g的无人机智能调度系统、方法及应用。
技术实现思路
1、(一)本发明要解决的技术问题是:由于无人机的续航时间有限,需要经常往返调度基座中进行充电,在众多无人机系统中,特别是在多条线路的交汇点,容易出现多架无人机进入同一基座中进行充电的情况,而通常情况下同一基座只能供一架无人机进行充电,影响了工作效率以及调度基座的利用率。
2、(二)技术方案
3、为了实现上述发明目的,本发明提供了基于5g的无人机智能调度系统,包括调度座,所述调度座上信号连接有5g信号接收中心,5g信号接收中心接收到无人机控制指令后,将信号传递给调度座,所述调度座连接有环境数据收集模块、演算中心和控制中心,若信号为降落信号,调度座直接将信号反馈给控制中心,若信号为起飞信号,调度座接收到指令后,控制环境数据收集模块收集实时的风速和风向数据,收集到的数据反馈给调度座,收到数据反馈后的调度座将数据发送给演算中心,经演算中心演算风速、风向和无人机功率数据,得出初步起飞演算结果,并将演算结果反馈给调度座,调度座收到反馈演算结果,将演算结果反馈给控制中心,控制中心根据接收的信号分别启动定位机构和发射机构,定位机构用于辅助无人机的精准降落,发射机构用于辅助无人机起飞。
4、无人机智能调度方法,包括以下步骤:
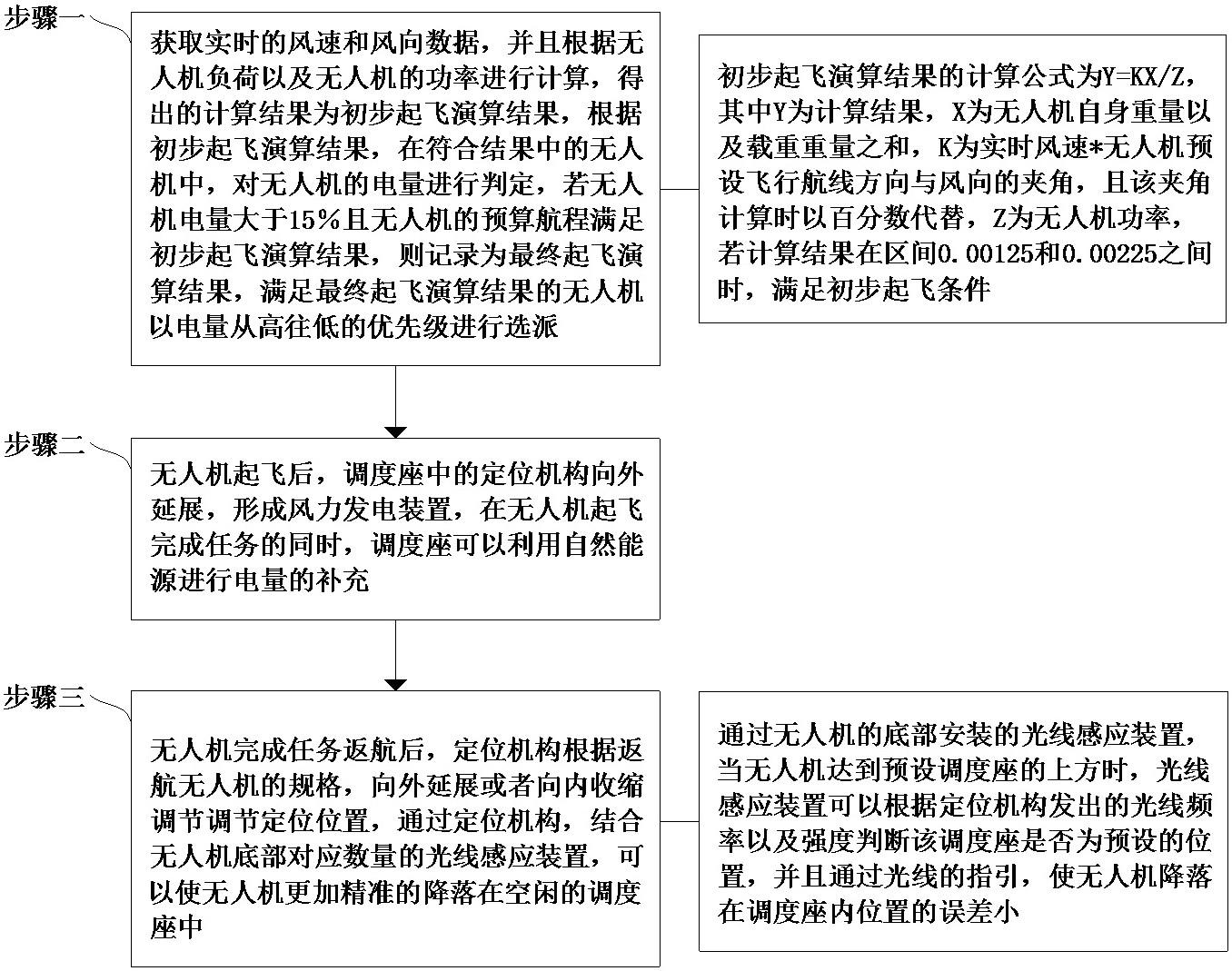
5、步骤一、获取实时的风速和风向数据,并且根据无人机负荷以及无人机的功率进行计算,得出的计算结果为初步起飞演算结果,根据初步起飞演算结果,在符合结果中的无人机中,对无人机的电量进行判定,若无人机电量大于15%且无人机的预算航程满足初步起飞演算结果,则记录为最终起飞演算结果,满足最终起飞演算结果的无人机以电量从高往低的优先级进行选派;
6、步骤二、无人机起飞后,调度座中的定位机构向外延展,形成风力发电装置,在无人机起飞完成任务的同时,调度座可以利用自然能源进行电量的补充;
7、步骤三、无人机完成任务返航后,定位机构根据返航无人机的规格,向外延展或者向内收缩调节调节定位位置,通过定位机构,结合无人机底部对应数量的光线感应装置,可以使无人机更加精准的降落在空闲的调度座中,通过在调度座中增加定位机构,不仅可以提升无人机返航后,无人机与预设调度座对接的精准度,并且由于光线频率的不同,即便有航线交错的无人机经过该调度座的上方,也可以判断无人机与该调度座不适配,无能在该调度座中降落,调度座的利用率也得到了提升。
8、其中,所述步骤一中初步起飞演算结果的计算公式为y=kx/z,其中y为计算结果,x为无人机自身重量以及载重重量之和,k为实时风速*无人机预设飞行航线方向与风向的夹角,且该夹角计算时以百分数代替,z为无人机功率,若计算结果在区间.和.之间时,满足初步起飞条件,通过引入初步起飞演算,可以根据实时的风向和风速选用合适功率的无人机,使无人机的喷洒任务可以更好的完成,并且可以避免风速过大时,采用不适合功率无人机时发生事故的概率。
9、其中,所述步骤三中,通过无人机的底部安装的光线感应装置,当无人机达到预设调度座的上方时,光线感应装置可以根据定位机构发出的光线频率以及强度判断该调度座是否为预设的位置,并且通过光线的指引,使无人机降落在调度座内位置的误差小。
10、无人机智能调度应用,所述定位机构设置在调度座顶端的中部,所述定位机构包括开设在调度座顶端中部的凹形槽,所述凹形槽内部的底端开设有圆槽,所述圆槽的内侧等弧等间距的开设有多个矩形槽,所述矩形槽内部的一侧通过卷簧和转轴连接有限位板,通过设置限位板,使电动推杆和滑块在滑入圆槽内时,限位板不会影响滑块在圆槽的内部滑动,当滑块和电动推杆反向转动时,在限位板的限制下,滑块和电动推杆可以重新进入对应的矩形槽内。
11、其中,所述定位机构还包括多个均匀设置在圆槽内的滑块,所述滑块的顶端固定连接有电动推杆,所述电动推杆的顶端固定连接有光线发射器,通过设置定位机构,使电机在工作过程中可以带动多个光线发射器和电动推杆移动,可以根据不同的无人机调节多个光线发射器的位置,以满足不同的无人机都可以在光线发射器的辅助下,准确的降落在凹形槽内,避免出现多架无人机停在同一调度座内的情况,提升了调度座的利用率,并且在电动推杆移动至凹槽内后,通过电动推杆的伸长,光线发射器和电动推杆可以抬升圆环,使叶片脱离卡槽内,在自然风的作用下,叶片和圆环可以带动电动推杆、转盘和电机的输出轴转动,进而在电机与外接的蓄电装置连接时,可以形成一个风力发电装置,功能性强。
12、其中,所述凹形槽内部底端的中部固定安装有电机,所述电机的输出轴固定连接有转盘,所述转盘上开设有多个供电动推杆端部滑动的弧形槽。
13、其中,所述凹形槽的内部设置有圆环,所述圆环内侧的底部均匀开设有多个供电动推杆插入的凹槽,所述圆环外侧的底部固定连接有环形板,所述凹形槽内部的底端开设有供环形板滑动的环形槽,所述圆环外侧的顶部固定连接有多个叶片,所述凹形槽内部的顶端开设有多个供叶片插入的卡槽,通过设置叶片和圆环,使电动推杆的端部插入凹槽内并将圆环顶起时,在自然风的作用下,叶片和圆环可以带动电动推杆、转盘和电机的输出轴转动,进而在电机与外接的蓄电装置连接时,可以形成一个风力发电装置。
14、其中,所述调度座的两侧均设置有连接机构,所述连接机构包括固定安装在调度座一侧底部的底架,所述底架的顶部设置有顶架,所述底架和顶架之间设置有防火罩,所述底架和顶架的一侧均固定连接有多个插块,所述底架和顶架的一侧均开设有多个供插块插入的插槽,通过设置连接机构,使多个调度座可以拼接在一起,并且当调度座发生火灾膨胀体受热膨胀时,可以推动圆杆移动,使相邻的两个调度座可以分离,顶架和防火罩在第一弹簧的作用下展开,隔绝两侧的调度座,并且该过程中,圆杆和惯性轮可以在卷簧的作用下旋转,扇叶将储存槽内的干冰粉尘通过排气孔吹向调度座上,进行简易灭火,减缓火势的扩散,连接机构不仅可以用于多个调度座的拼接,还可以用于减缓火势扩散,功能性强。
15、其中,所述顶架底端的两侧均通过转轴连接有连接杆,所述连接杆的底端通过转轴与底架的内部滑动连接,所述连接杆的底端固定连接有滑杆,所述调度座的一侧开设有供滑杆滑动的滑槽,所述顶架和底架之间设置有第一弹簧,通过设置连接杆和滑杆,使顶架靠向底架时,连接带可以带动惯性轮和圆杆转动,扭转扭簧,进而在顶架远离底架时,圆杆和惯性轮可以在扭簧的作用下转动,使扇叶可以将储存槽内的粉尘吹向调度座的上方。
16、其中,所述调度座前后侧的两端均开设有储存槽,所述储存槽的一侧开设有方槽,所述储存槽的内部穿插连接有圆杆,所述圆杆的一端设置有惯性轮,所述惯性轮上卷绕有连接带,所述连接带的一端与滑杆的一端固定连接,所述圆杆的中部设置有扇叶,所述圆杆的端部通过轴承和扭簧连接有为与方槽内的活塞,所述圆杆上设置有位于方槽内的第二弹簧,所述方槽的内部设置有膨胀体,所述调度座的一侧开设有与储存槽连通的进气孔,所述调度座的顶端开设有与储存槽连通的排气孔,所述惯性轮和扇叶的中部以及圆杆的外部均设有相适配的齿牙。
- 还没有人留言评论。精彩留言会获得点赞!