可自重构星球车的多关节协调控制方法
本发明涉及星球车,尤其涉及可自重构星球车的多关节协调控制方法。
背景技术:
1、随着星球探测任务的推进,星球车作为科学探测仪器的有效载体平台,在星球探测工程中起着举足轻重的作用,其中,轮式移动机器人凭借便于控制、移动灵活、模块化与拓展性强的优点广泛用作星球车的主体,在可自重构星球车执行探测任务的过程中,多关节的运动控制是提高星球车在变形和粗糙地形,特别是行星环境下探测能力的关键。
2、目前对可自重构星球车的研究集中在星球车构型的多样化,忽略了在控制模式切换策略中对星球车多关节运动协调策略的定义,不能在重构过程中避免车体内部多关节间的配合故障,从而导致星球车不具备多关节协调的机械模态转换和移动模式切换控制的复杂操作功能,影响其实际应用价值。
技术实现思路
1、本发明解决的问题是如何对可自重构星球车多关节运动进行协调控制,提高可自重构星球车的实际应用价值。
2、为解决上述问题,本发明提供可自重构星球车的多关节协调控制方法,包括如下步骤:
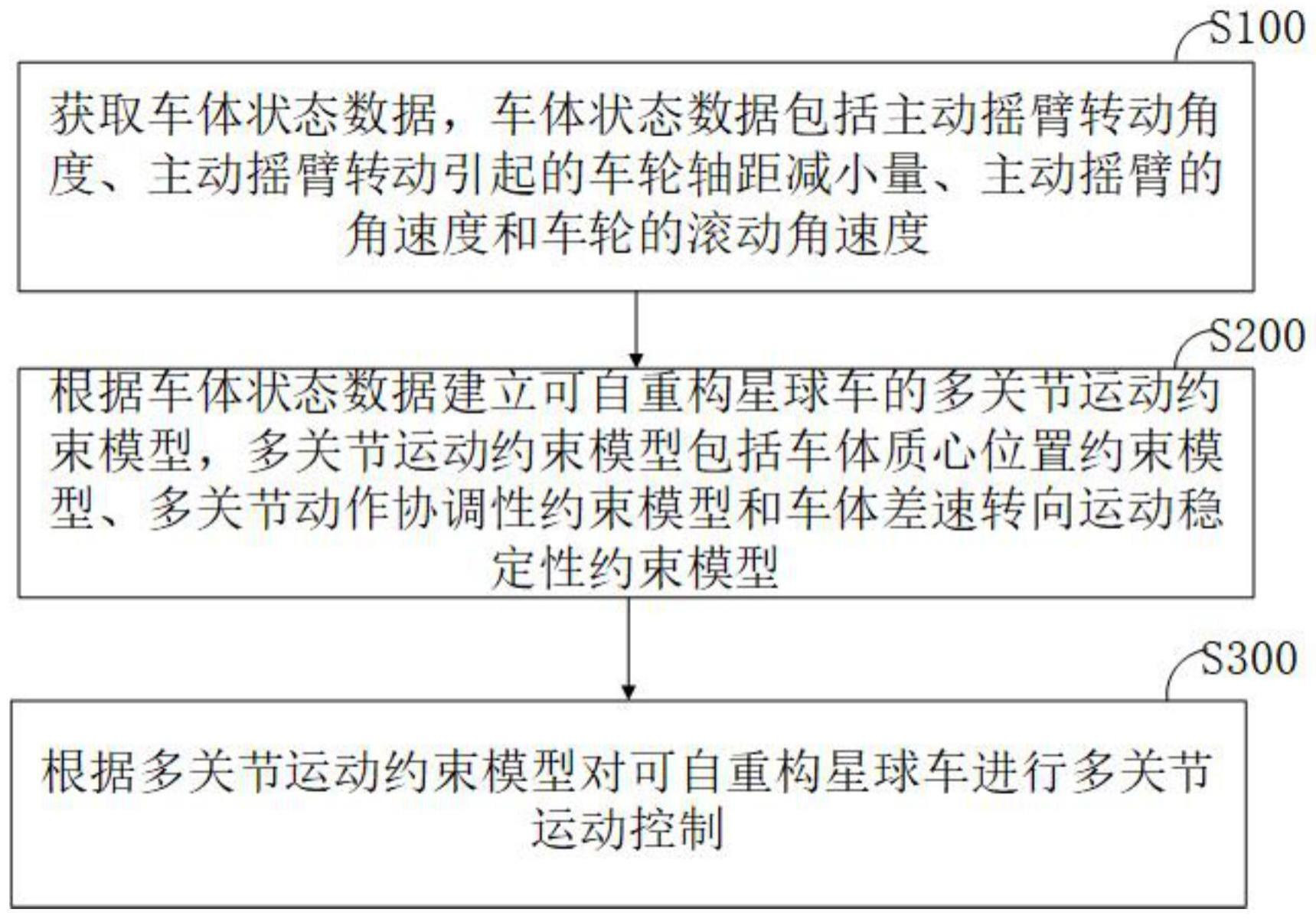
3、获取车体状态数据,所述车体状态数据包括主动摇臂转动角度、主动摇臂转动引起的车轮轴距减小量、主动摇臂的角速度和车轮的滚动角速度;
4、根据所述车体状态数据建立所述可自重构星球车的多关节运动约束模型,所述多关节运动约束模型包括车体质心位置约束模型、多关节动作协调性约束模型和车体差速转向运动稳定性约束模型;
5、根据所述多关节运动约束模型对所述可自重构星球车进行多关节运动控制。
6、可选地,所述根据所述车体状态数据建立所述可自重构星球车的多关节运动约束模型包括:
7、根据所述主动摇臂转动角度和所述主动摇臂转动引起的车轮轴距减小量建立车体质心位置约束模型,根据所述主动摇臂转动引起的车轮轴距减小量建立多关节动作协调性约束模型,根据所述主动摇臂的角速度和所述车轮的滚动角速度建立车体差速转向运动稳定性约束模型。
8、可选地,所述车体质心位置约束模型包括第一约束、第二约束和第三约束,其中,所述第一约束包括:
9、所述主动摇臂转动引起的车轮轴距减小量小于等于第一预设阈值,所述第一约束用于避免车轮相撞;
10、所述第二约束包括:
11、由主动摇臂转动引起的车体横滚角小于等于第二预设阈值,所述第二约束用于避免车体产生异常横滚角度;
12、所述第三约束包括:
13、由主动摇臂转动引起的车体转向角小于等于第三预设阈值,所述第三约束用于避免车体转向角度偏差过大。
14、可选地,所述多关节动作协调性约束模型包括:
15、车轮前向速度差等于所述主动摇臂的角速度的第一预设倍数,所述多关节协动作调性约束模型用于避免车体侧翻。
16、可选地,所述车体差速转向运动稳定性约束模型包括第四约束、第五约束、第六约束和第七约束,其中,所述第四约束包括:
17、所述主动摇臂的角速度小于等于车体在悬架姿态调整之前的初始速度的第二预设倍数,所述第四约束用于避免车轮合并速度为零;
18、所述第五约束包括:
19、所述可自重构星球车的前向速度偏差小于第四预设阈值,所述第五约束用于避免车体前向速度失调;
20、所述第六约束包括:
21、所述可自重构星球车的车体转向角速度偏差小于第五预设阈值,所述第六约束用于避免车体转向角速度失调;
22、所述第七约束包括:
23、所述可自重构星球车的车体横滚角速度小于第六预设阈值,所述第七约束用于避免车体横滚角速度失调。
24、可选地,还包括车轮与地面接触的数量约束模型,所述车轮与地面接触的数量约束模型包括第八约束、第九约束和第十约束,其中所述第八约束包括:
25、车轮同时离地数量小于等于第七预设阈值;
26、所述第九约束包括:
27、单侧车轮离地数量小于等于第八预设阈值;
28、所述第十约束包括:
29、前轮和后轮至少有一个轮接触地面。
30、可选地,可自重构星球车的多关节协调控制方法还包括:
31、根据轮地接触点的可变位置和车体三维线速度建立车体运动学模型,根据车体属性建立车体动力学模型。
32、可选地,所述车体运动学模型包括考虑轮地接触点的动态移动运动学模型和具有竖直自由度的差速转向运动学模型。
33、可选地,所述考虑轮地接触点的动态移动运动学模型和所述具有竖直自由度的差速转向运动学模型的建立过程包括:
34、根据车体坐标系的偏置轮矩阵、悬架铰接关节的角速度、轮地接触点相对于车轮中心的线速度、车轮支撑臂铰接关节的角速度和所述车体三维线速度得到考虑轮地接触点的动态移动运动学模型;
35、根据所述主动摇臂的角速度和车体姿态角得到具有竖直自由度的差速转向运动学模型。
36、可选地,所述根据车体属性建立车体动力学模型包括:
37、根据关节角度、关节数量、主动摇臂的驱动力矩建立所述车体动力学模型。
38、相对于现有技术,本发明所述的可自重构星球车的多关节协调控制方法,通过获取车体状态数据并根据车体状态数据建立车体质心位置、多关节动作协调性和车体差速转向运动稳定性三个层面上的多关节运动约束模型,实现重构过程中对车体内部多关节的运动协调控制,保证车体运动安全性,从而实现可自重构轮式移动星球车的机械模态转换功能和多运动模式切换功能,提高可自重构轮式移动星球车的实际应用价值。
技术特征:
1.可自重构星球车的多关节协调控制方法,其特征在于,包括:
2.根据权利要求1所述的可自重构星球车的多关节协调控制方法,其特征在于,所述根据所述车体状态数据建立所述可自重构星球车的多关节运动约束模型包括:
3.根据权利要求2所述的可自重构星球车的多关节协调控制方法,其特征在于,所述车体质心位置约束模型包括第一约束、第二约束和第三约束,其中,所述第一约束包括:
4.根据权利要求2所述的可自重构星球车的多关节协调控制方法,其特征在于,所述多关节动作协调性约束模型包括:
5.根据权利要求2所述的可自重构星球车的多关节协调控制方法,其特征在于,所述车体差速转向运动稳定性约束模型包括第四约束、第五约束、第六约束和第七约束,其中,所述第四约束包括:
6.根据权利要求1所述的可自重构星球车的多关节协调控制方法,其特征在于,还包括车轮与地面接触的数量约束模型,所述车轮与地面接触的数量约束模型包括第八约束、第九约束和第十约束,其中所述第八约束包括:
7.根据权利要求1所述的可自重构星球车的多关节协调控制方法,其特征在于,还包括:
8.根据权利要求7所述的可自重构星球车的多关节协调控制方法,其特征在于,所述车体运动学模型包括考虑轮地接触点的动态移动运动学模型和具有竖直自由度的差速转向运动学模型。
9.根据权利要求8所述的可自重构星球车的多关节协调控制方法,其特征在于,所述考虑轮地接触点的动态移动运动学模型和所述具有竖直自由度的差速转向运动学模型的建立过程包括:
10.根据权利要求7所述的可自重构星球车的多关节协调控制方法,其特征在于,所述根据车体属性建立车体动力学模型包括:
技术总结
本发明提供可自重构星球车的多关节协调控制方法,涉及星球车技术领域,该方法包括:获取车体状态数据,包括主动摇臂转动角度、主动摇臂转动引起的车轮轴距减小量、主动摇臂的角速度和车轮的滚动角速度;根据所述车体状态数据建立多关节运动约束模型,包括车体质心位置约束模型、多关节动作协调性约束模型和车体差速转向运动稳定性约束模型;根据所述多关节运动约束模型对所述可自重构星球车进行多关节运动控制。通过建立车体质心位置、多关节动作协调性和车体差速转向运动稳定性三个层面上的多关节运动约束模型,实现重构过程中对车体内部多关节的运动协调控制,从而实现可自重构轮式移动星球车的机械模态转换功能和多运动模式切换功能。
技术研发人员:丁亮,齐华囡,高海波,杨怀广,李欣育,李楠,邓宗全
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!