陀螺稳定平台滑模控制方法、装置、存储介质及电子设备与流程
本发明涉及控制算法。
背景技术:
1、稳定平台是一种具有隔离扰动及跟踪功能的伺服系统,因其独特的功能而不断被应用在国防装备、航空航天、工业生产和民用设施中,控制算法作为稳定平台隔离扰动、稳定运行的核心部分,其优良直接关系到稳定平台伺服系统的响应速度及精度。在陀螺稳定平台控制中,速度环的控制起到十分重要的作用。
2、现有方法中,在速度环控制中通常采用传统的控制器。传统控制器具有结构简单、控制算法易实现等优点,但固定参数的控制器无法解决快速性和稳态性能之间的矛盾;另外,传统控制是根据误差进行调整的控制策略,不能对陀螺稳定平台运行中的未知非线性干扰进行快速隔离。
3、而在实际复杂的工作环境下,来自载体飞机的姿态变化,载体飞机的振动、气流扰动、线缆等其他一些不确定因素都将给光电平台的稳定控制引入了扰动力矩,使得平台电机力矩不能完全精确地驱动框架,视轴不能准确地稳定在期望位置。此外,在平台长期使用过程中,不同的负载大小、不同温度下的运行环境、长期使用所造成的部件磨损等,都将导致光电平台的系统参数的变动,影响一些包含系统参数的控制器设计。上述因素导致的未知扰动影响了陀螺稳定平台的抗干扰能力,这就使得传统控制方法的弊端尤为明显。
4、因此,如何提供一种在未知扰动下也能达到稳定控制的陀螺稳定平台滑模控制方法,成为本领域亟待解决的技术问题。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种陀螺稳定平台滑模控制方法、装置、存储介质及电子设备,该方法在用状况扩张观测器观测未知扰动的基础上引入滑模控制对速度环进行控制,大大提高系统的控制能力和抗干扰能力。
2、基于同一发明构思,本发明具有两个独立的技术方案:
3、1、一种基于状态扩张观测器的陀螺稳定平台滑模控制方法,包括:
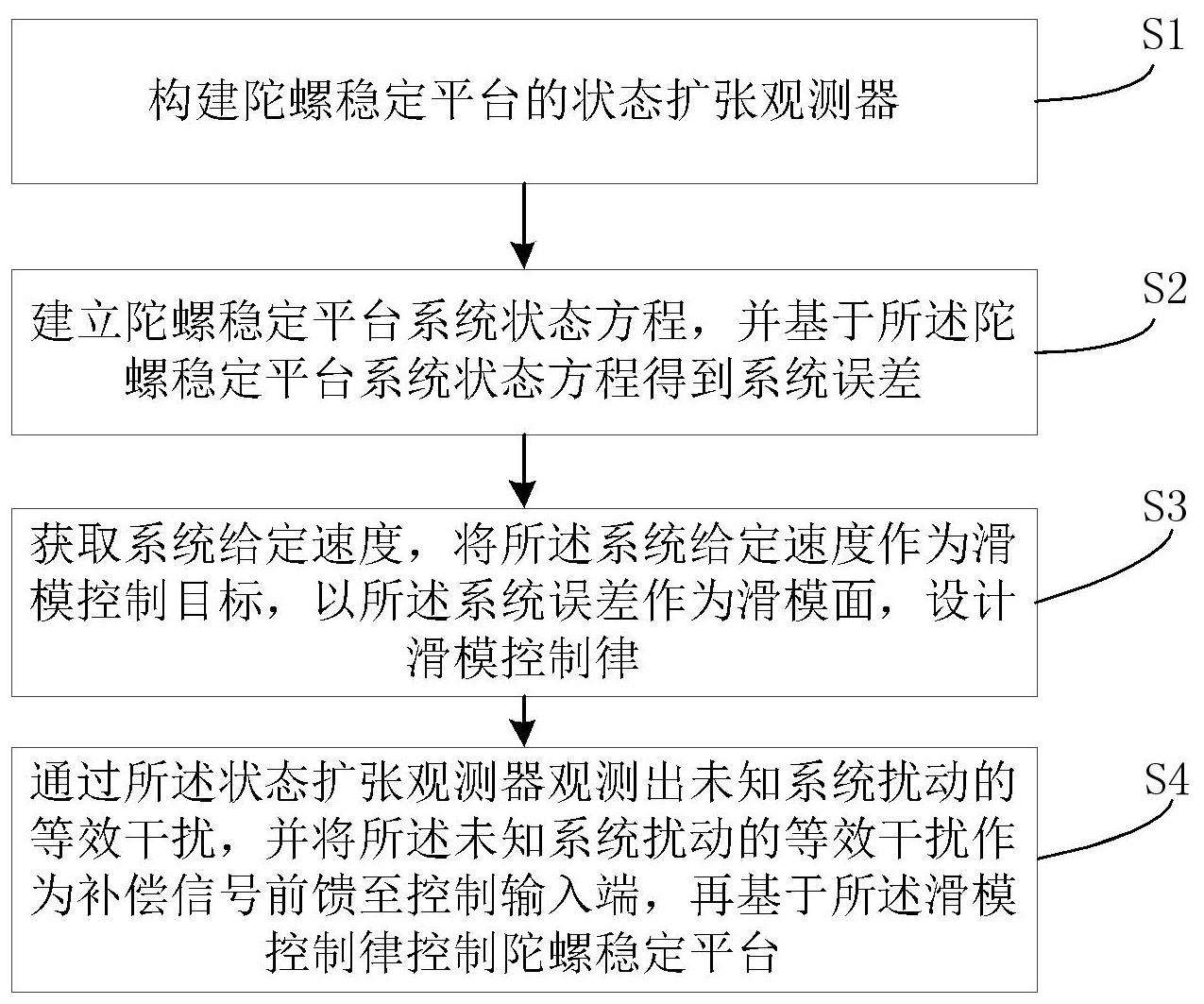
4、构建陀螺稳定平台的状态扩张观测器;
5、建立陀螺稳定平台系统状态方程,并基于所述陀螺稳定平台系统状态方程得到系统误差;
6、获取系统给定速度,将所述系统给定速度作为滑模控制目标,以所述系统误差作为滑模面,设计滑模控制律;
7、通过所述状态扩张观测器观测出未知系统扰动的等效干扰,并将所述未知系统扰动的等效干扰作为补偿信号前馈至控制输入端,再基于所述滑模控制律控制陀螺稳定平台。
8、进一步地,所述状态扩张观测器基于如下步骤构建:
9、构建陀螺稳定平台被控对象的状态空间模型,表示如下:
10、;
11、其中,为滑模控制律,为速度输出信号,为系统状态,表示系统状态的一阶导数,a、b、c为已知固定参数矩阵;
12、基于所述陀螺稳定平台被控对象的状态空间模型,构建理论模型;
13、对所述理论模型引入反馈进行矫正,构建状态扩张观测器。
14、进一步地,所述状态扩张观测器表示如下:
15、;
16、;
17、;
18、;
19、;
20、其中,u为滑模控制律,为速度输出信号,为速度输出信号的估计值,为系统状态,表示系统状态的估计值,表示系统状态的估计值的一阶导数,矩阵a、b、c为已知固定参数矩阵,矩阵为调节矩阵,为被控对象测得参数,为正整数。
21、进一步地,所述陀螺稳定平台系统状态方程表示如下:
22、;
23、其中,为系统状态,为系统扰动及未建模部分,为有界的,为滑模控制律,为系统状态的一阶导数。
24、进一步地,所述系统误差的动态方程表示如下:
25、;
26、其中,为系统给定速度,x为系统状态,为系统扰动及未建模部分的上界,为系统动态误差,为系统给定速度的一阶导数,其中,<。
27、进一步地,所述滑模面表示如下:
28、;
29、其中,为系统给定速度,x为系统状态,e为系统误差,为滑模面。
30、进一步地,所述滑模控制律表示如下:
31、;
32、;
33、其中,u为滑模控制律,为系统扰动及未建模部分的上界,e为系统误差,为系统给定速度的一阶导数,为调节参数。
34、2、一种基于状态扩张观测器的陀螺稳定平台滑模控制装置,包括:
35、状态扩张观测器构建模块,用于构建陀螺稳定平台的状态扩张观测器;
36、系统误差构建模块,用于建立陀螺稳定平台系统状态方程,并基于所述陀螺稳定平台系统状态方程得到系统误差;
37、滑模设计模块,用于获取系统给定速度,将所述系统给定速度作为滑模控制目标,以所述系统误差作为滑模面,设计滑模控制律;
38、控制模块,用于通过所述状态扩张观测器观测出未知系统扰动的等效干扰,并将所述未知系统扰动的等效干扰作为补偿信号前馈至控制输入端,再基于所述滑模控制律控制陀螺稳定平台。
39、3、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法。
40、4、一种电子设备,包括处理器和存储装置,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行上述的方法。
41、本发明提供的陀螺稳定平台滑模控制方法、装置、存储介质及电子设备,至少包括如下有益效果:
42、对速度环采用基于状态扩张观测器的陀螺稳定平台滑模控制方法,通过状态扩张观测器观测出系统扰动,然后把观测出的扰动通过补偿加入平台输入端,消去陀螺稳定平台中的总体扰动,在此基础上,引入滑模控制策略,根据所设计的滑模面,使偏离滑模面的系统输出,根据控制策略将其引导到滑模面上,从而大大提高系统的控制能力和抗干扰能力。
技术特征:
1.一种基于状态扩张观测器的陀螺稳定平台滑模控制方法,其特征在于,包括:
2.根据权利要求1所述的基于状态扩张观测器的陀螺稳定平台滑模控制方法,其特征在于,所述状态扩张观测器基于如下步骤构建:
3.根据权利要求2所述的基于状态扩张观测器的陀螺稳定平台滑模控制方法,其特征在于,所述状态扩张观测器表示如下:
4.根据权利要求1所述的基于状态扩张观测器的陀螺稳定平台滑模控制方法,其特征在于,所述陀螺稳定平台系统状态方程表示如下:
5.根据权利要求4所述的基于状态扩张观测器的陀螺稳定平台滑模控制方法,其特征在于,所述系统误差的动态方程表示如下:
6.根据权利要求1所述的基于状态扩张观测器的陀螺稳定平台滑模控制方法,其特征在于,所述滑模面表示如下:
7.根据权利要求1所述的基于状态扩张观测器的陀螺稳定平台滑模控制方法,其特征在于,所述滑模控制律表示如下:
8.一种基于状态扩张观测器的陀螺稳定平台滑模控制装置,其特征在于,包括:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一所述的方法。
10.一种电子设备,包括处理器和存储装置,其特征在于,所述存储装置中存有多条指令,所述处理器用于读取所述存储装置中的多条指令并执行如权利要求1-7任一所述的方法。
技术总结
陀螺稳定平台滑模控制方法、装置、存储介质及电子设备,涉及控制算法技术领域,方法包括:构建陀螺稳定平台的状态扩张观测器;建立陀螺稳定平台系统状态方程,并基于所述陀螺稳定平台系统状态方程得到系统误差;获取系统给定速度,将所述系统给定速度作为滑模控制目标,以所述系统误差作为滑模面,设计滑模控制律;通过所述状态扩张观测器观测出未知系统扰动的等效干扰,并将所述未知系统扰动的等效干扰作为补偿信号前馈至控制输入端,再基于所述滑模控制律控制陀螺稳定平台;该方法在用状况扩张观测器观测未知扰动的基础上引入滑模控制对速度环进行控制,大大提高系统的控制能力和抗干扰能力。
技术研发人员:宋倩
受保护的技术使用者:长春通视光电技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!