主动前轮转向时滞反馈控制器参数的时滞可行域的标定方法
本发明属于汽车主动前轮转向系统动力学及控制领域,尤其涉及的是一种主动前轮转向时滞反馈控制器参数的时滞可行域的标定方法。
背景技术:
1、时滞是机电系统中常见的现象,它会显著影响系统的性能和稳定性。在汽车主动前轮转向控制系统中,时滞主要来源于传感器信号采样、ecu处理运算、执行器作动和轮胎变形等环节。这些时滞会导致转向控制器的设计性能降低,甚至引起系统不稳定,如转向振荡、入弯偏离,极端情况下会威胁乘员安全。因此,如何降低和优化时滞对转向系统的影响,保证控制系统在时滞下的性能和稳定性,是一个重要的研究课题。
2、当前对于afs系统中的时滞效应研究还不够充分,现有研究大多未充分考虑控制器参数组合在时滞无关稳定区以及时滞相关稳定区的分布,同时也未对控制系统不同控制参数的组合所能容忍的临界时滞进行研究。这些问题会对系统的稳定性和性能参数产生不利影响,实际工程应用中可能导致严重的失稳风险。此外,当前主流的afs控制策略主要基于误差控制的pd、pid或反馈控制,这些控制策略的性能高度依赖于控制器参数或系数的选择。现有技术并未充分定义和解析其在时滞条件下的稳定性,导致选取的控制参数在不同时滞条件下可能无法保持稳定性和满足车辆的性能要求。这也使得控制器参数的确定需要依赖大量的实验结果,增加了试验成本,因此,这也是现阶段亟待解决的问题。
技术实现思路
1、本发明是为了解决上述现有技术存在的不足之处,提出了一种主动前轮转向时滞反馈控制器参数的时滞可行域的标定方法,以期通过定义控制器参数组合的时滞无关稳定区和时滞相关稳定区,能得到afs时滞控制器在参数组合下的临界时滞,在选取车辆控制器参数前,判断控制系统是否满足时滞稳定性要求,从而有效地抑制时滞对afs控制系统的负面影响,进而能提高控制器的性能和稳定性。
2、本发明为解决技术问题采用如下技术方案:
3、本发明一种主动前轮转向时滞反馈控制器参数的时滞可行域的标定方法的特点在于,包括以下步骤:
4、步骤1:利用式(1)建立2dof车辆线性模型的运动微分方程:
5、
6、式(1)中:β表示质心侧偏角;表示质心侧偏角β的一阶导数;γ为横摆角速度,表示γ的一阶导数;a,b为前、后轴的长度;m为车身总质量;vx为纵向车速;iz为绕z轴的转动惯量;fyf,fyr分别为前轮f、后轮r的侧偏力;
7、利用式(2)定义前、后轮的侧偏角αf,αr:
8、
9、式(2)中:δf为前轮f的转向角;
10、忽略非线性因素对车辆轮胎侧偏力的影响,从而利用式(3)得到车辆前后轮的线性侧向力的简化模型:
11、fyi=ciαi (3)
12、式(3)中:i=f,r分别代表前、后轮;ci为车轮i的侧偏刚度;
13、步骤2:利用式(4)建立包含时滞的二阶线性车辆时滞系统模型:
14、
15、式(4)中:x(t)表示t时刻的状态量,且x(t)=[β,γ]t;表示x(t)的一阶导数;τ表示状态反馈控制器的时滞,且τ≥0;δδf(t-τ)表示考虑时滞效应的附加前轮转向角;通过联立式(1)、式(2)、式(3)、式(4)得到该系统状态方程的两个系数a、b,并有:
16、
17、式(5)中:cr为后轮r的侧偏刚度;cf为前轮f的侧偏刚度;
18、步骤3:利用式(6)设计时滞反馈控制的车辆afs控制器:
19、
20、式(6)中,k为状态反馈控制器的增益;x(t-τ)表示考虑时滞的状态量,且x(t-τ)=[β(t-τ),γ(t-τ)]t;kp,kd表示状态反馈控制器中待确定的比例控制系数;
21、利用式(7)得到车辆2dof闭环系统控制模型:
22、
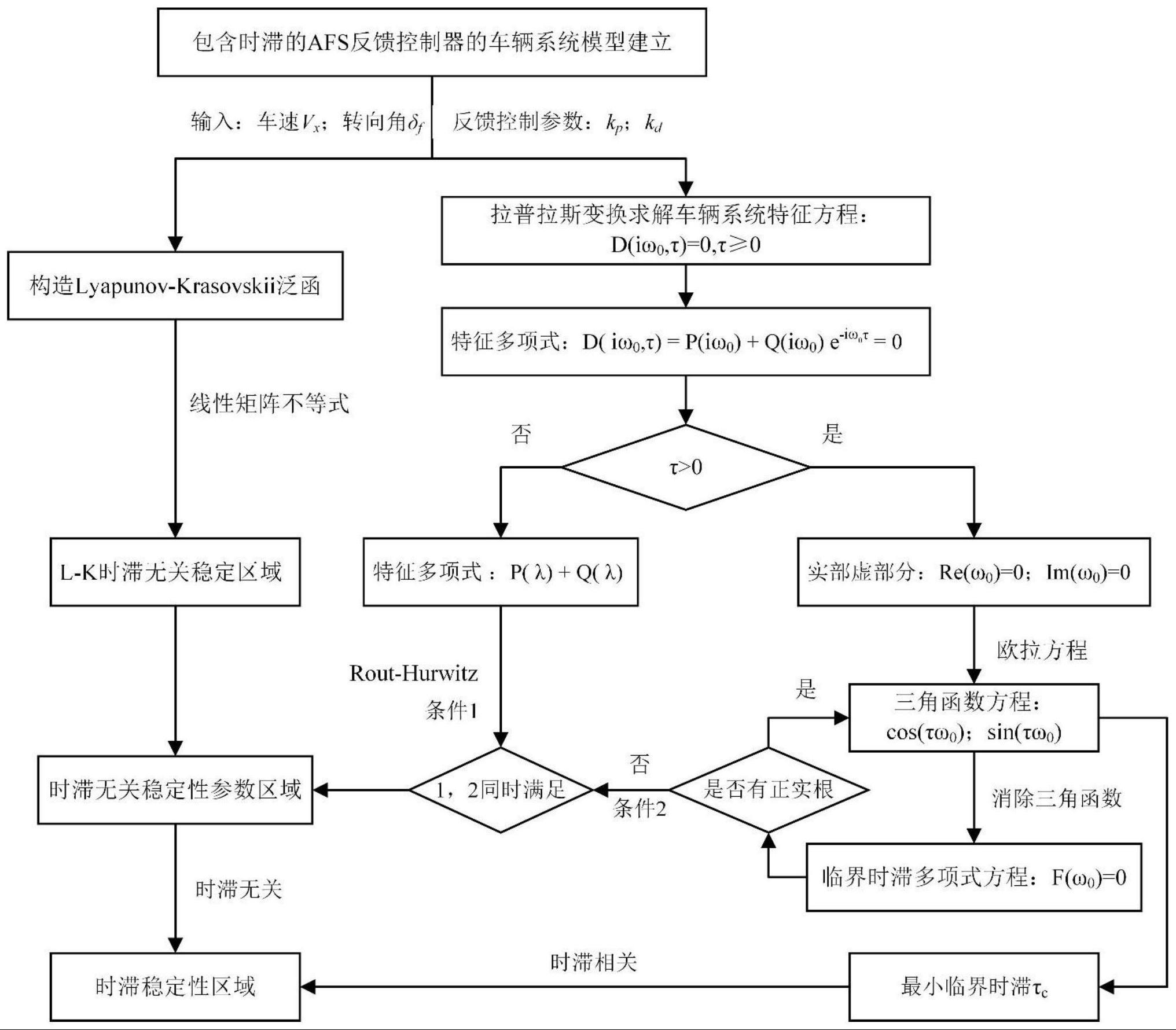
23、步骤4:利用式(8)构造t时刻的lyapunov-krasovskii泛函v(t):
24、
25、式(8)中,p和s为两个n×n维的定常矩阵;且p=pt>0,s=st>0;pt表示p的转置,st表示s的转置;s表示时间变量;x(s)表示afs时滞控制系统在过去的时间点s上的状态;xt(s)表示x(s)的转置;xt(t)表示x(t)的转置;
26、利用式(9)得到v(t)的一阶导数从而利用式(10)构建稳定条件:
27、
28、
29、式(9)中,xt(t-τ)表示x(t-τ)的转置;
30、用matlab的lmi工具箱对式(10)求解,得到控制系统时滞无关稳定性参数区域的结果;
31、步骤5:利用式(11)所示的拉普拉斯变换得到具有反馈控制的车辆主动前轮转向时滞控制器的特征方程d(λ):
32、d(λ)=p(λ)+q(λ)e-λτ=0 (11)
33、式(11)中,λ表示特征方程的特征值;p(λ)和q(λ)分别为二阶和一阶实系数多项式;
34、步骤6:当τ=0时,利用式(12)得到车辆afs时滞控制器的特征方程:
35、d(λ)=p(λ)+q(λ)=0 (12)
36、满足式(12)中的结果,可得该系统时滞无关稳定性参数区域的条件之一。
37、步骤7:当τ>0时,令纯虚根λ=iω0,并利用式(13)对式(11)进行实虚部分离:
38、pr(ω0)+ipi(ω0)+[qr(ω0)+iqi(ω0)][cos(τω0)-isin(τω0)]=0 (13)
39、式(13)中,λ表示复数的根;i表示虚数单位;ω0表示角频率;pr(ω0)表示p(λ)的实部系数;pi(ω0)表示p(λ)的虚部系数;qr(ω0)表示和q(λ)的实部系数;qi(ω0)表示和q(λ)虚部系数;
40、令式(13)中的实部和虚部都为0,从而得到式(14),化简得到式(15):
41、
42、
43、式(14)中,re(ω0)表示特征方程的实部系数;im(ω0)表示特征方程的虚部系数;
44、消去式(14)中的三角函数,从而利用式(16)得到多项式方程f(ω0):
45、
46、步骤8:利用matlab内置函数对方程f(ω0)=0进行求解,得到的求解结果中若除0外无正实根,则表示车辆afs时滞控制器对于任意时滞均保持稳定,并得到时滞无关稳定区;若存在正实根ω0,则表示afs时滞控制系统处于时滞相关稳定区,并将正实根ω0代入式(15)中,从而得到当前纵向车速vx下的临界时滞τ0;且τ0>0,进而利用式(17)得到在不同周期角频率下的最小临界时滞τmin:
47、
48、式(17)中,j表示不同周期角频率;
49、步骤9:改变不同的控制参数kp、kd后,返回步骤3顺序执行,从而得到在不同比例控制系数下的afs时滞反馈控制器时滞无关稳定区和时滞相关稳定区中控制器能包容的最小临界时滞可行域;
50、步骤10:改变纵向车速vx后,返回步骤3~步骤9顺序执行,从而得到不同车速影响下的afs反馈控制器在不同比例控制系数下的时滞无关稳定区和时滞相关稳定区中控制器能包容的最小临界时滞可行域。
51、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述标定方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
52、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述标定方法的步骤。
53、与现有技术相比,本发明的有益效果在于:
54、1.本发明定义了afs控制器参数时滞无关稳定区和时滞相关稳定区,有效地分析了控制器在不同控制参数组合下所能容忍的临界时滞,从而为车辆控制器参数的选取提供依据,降低了时滞对控制器稳定性以及性能的影响。
55、2.本发明利用时滞系统的稳定性分析方法,得到控制系统的稳定性判据,能够在选取车辆控制器参数前,判断控制系统是否满足时滞稳定性要求,减少了时滞控制器的参数调节范围,并在该范围内选取合适的参数,从而降低了在实际工程中的试验成本,能够有效地保证车辆控制系统的稳定性,提高了车辆的操纵性和安全性。
56、3.本发明主要是对车辆afs控制器参数稳定性边界及其时滞可行域进行标定,而其研究方法可适用于汽车的其他控制系统,如悬架系统等,甚至也能够适用于其他存在时滞现象的机电系统。该方法对于各类时滞大小和不同参数组合的汽车系统具备通用性,具有较好的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!