一种四旋翼无人机自适应姿态控制方法与流程
本发明涉及无人机应用领域,具体的说是一种四旋翼无人机自适应姿态控制方法。
背景技术:
1、四旋翼无人机是一个具有6个自由度、4个控制输入的欠驱动系统,具有非线性、多变量、强耦合和抗干扰能力弱的特性,而自适应控制在旋翼的飞行控制领域得到了广泛应用。当无人机在高空飞行时,由于不同位置的气流速度不同,而无人机受到的干扰程度也不同,无人机在飞行时难以快速调整状态,保持稳定。
技术实现思路
1、针对现有技术中的问题,本发明提供了一种四旋翼无人机自适应姿态控制方法。
2、本发明解决其技术问题所采用的技术方案是:一种四旋翼无人机自适应姿态控制方法,包括:
3、(1)建立四旋翼无人机姿态和角速率模型;
4、(2)使用自适应方法设计控制器。
5、具体的,所述步骤(1)包括:
6、1)将四旋翼无人机四个电机的推力分别定义为f1,f2,f3,f4;
7、2)建立四旋翼的姿态角与机体系的角速度之间的关系;
8、3)计算四旋翼姿态角速率;
9、4)通过经典力学运动方程建立的四旋翼无人机姿态运动模型的基础上,设计mrac自适应控制器。
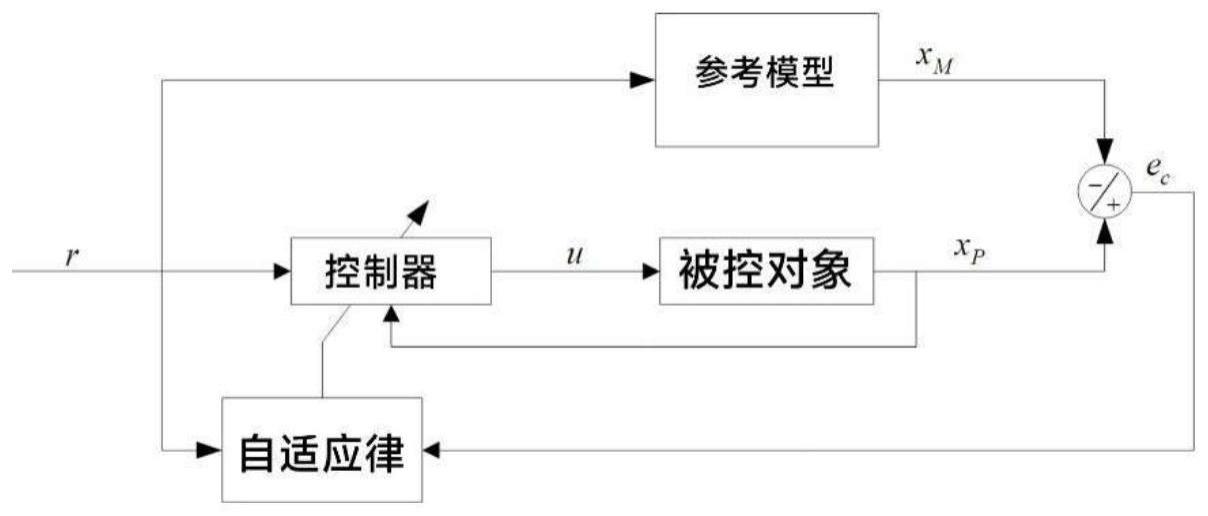
10、具体的,所述步骤(2):直接mrac控制思路基于预期的参考模型,计算当前实际被控对象与参考模型之间的误差,再根据得到的误差,采用合理的自适应律更新控制器的参数,实现在外部不确定动态的情况下实现稳定控制。
11、具体的,所述控制方法的综合控制回路中旋翼姿态的角速度选取为内环的系统,内环系统采用直接mrac方法进行控制器设计;旋翼的姿态角度被选取为外环的系统,外环的控制参考经典串级pid控制框架的思路,采用比例控制;综合的旋翼姿态控制模型为:外环比例控制复合内环直接mrac控制,本方法中用模型参考自适应控制替代了传统的内环pid控制器,从而实现了对旋翼姿态的自适应抗扰动鲁棒控制;对方程进行线性化,将线性化后的模型作为四旋翼的实际模型,而线性化过程中忽略掉的非线性耦合部分与可能产生的未建模动态作为自适应律要解决的扰动去处理。
12、具体的,所述外环的控制本方法采取简单的比例控制,因为内环已经实现了对三通道的解耦控制以及对外界扰动的自适应估计,所以单纯的比例角度控制就可以得到很好的效果。
13、本发明的有益效果:本方法在四旋翼串级pid姿态控制器的基础上,设计了一种直接mrac的姿态控制方法,基于对旋翼期望动态的参考模型,实时计算并修正控制器参数,实现在未建模动力学和持续外部干扰激励的情况下,能够快速和稳健的适应不确定性,实现旋翼姿态的鲁棒控制。
技术特征:
1.一种四旋翼无人机自适应姿态控制方法,其特征在于,包括:
2.根据权利要求1所述的一种四旋翼无人机自适应姿态控制方法,其特征在于,所述步骤(1)包括:
3.根据权利要求1所述的一种四旋翼无人机自适应姿态控制方法,其特征在于,所述步骤(2):直接mrac控制思路基于预期的参考模型,计算当前实际被控对象与参考模型之间的误差,再根据得到的误差,采用合理的自适应律更新控制器的参数,实现在外部不确定动态的情况下实现稳定控制。
4.根据权利要求1所述的一种四旋翼无人机自适应姿态控制方法,其特征在于:所述控制方法的综合控制回路中旋翼姿态的角速度选取为内环的系统,内环系统采用直接mrac方法进行控制器设计;旋翼的姿态角度被选取为外环的系统,外环的控制参考经典串级pid控制框架的思路,采用比例控制;综合的旋翼姿态控制模型为:外环比例控制复合内环直接mrac控制,本方法中用模型参考自适应控制替代了传统的内环pid控制器,从而实现了对旋翼姿态的自适应抗扰动鲁棒控制;对方程进行线性化,将线性化后的模型作为四旋翼的实际模型,而线性化过程中忽略掉的非线性耦合部分与可能产生的未建模动态作为自适应律要解决的扰动去处理。
5.根据权利要求4所述的一种四旋翼无人机自适应姿态控制方法,其特征在于:所述外环的控制本方法采取简单的比例控制,因为内环已经实现了对三通道的解耦控制以及对外界扰动的自适应估计,所以单纯的比例角度控制就可以得到很好的效果。
技术总结
本发明涉及无人机应用领域,具体的说是一种四旋翼无人机自适应姿态控制方法,包括:(1)建立四旋翼无人机姿态和角速率模型;(2)使用自适应方法设计控制器。本方法在四旋翼串级PID姿态控制器的基础上,设计了一种直接MRAC的姿态控制方法,基于对旋翼期望动态的参考模型,实时计算并修正控制器参数,实现在未建模动力学和持续外部干扰激励的情况下,能够快速和稳健的适应不确定性,实现旋翼姿态的鲁棒控制。
技术研发人员:周传飞,闫欣昶,吕艳超
受保护的技术使用者:国核信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!