复杂扰动下柔性体航天器编队限制性姿态调节控制方法
本发明属于航天器控制,具体涉及一种复杂扰动下柔性体航天器编队限制性姿态调节控制方法。
背景技术:
1、多航天器编队飞行是航天任务探索的一种重要模式,由多个距离较近且具有交互协作的航天器组成,编队中的成员通过组网进行信息交互并进行协同控制,以达到整体的队形和姿态要求,从而共同完成特定的空间任务。
2、航天器在飞行过程中,由于环境的复杂性,不可避免的会受到各种干扰,这些干扰会对航天器编队的姿态产生较大的影响,导致姿态产生偏差,进而影响航天器编队系统的稳定性和控制精度。因此需要考虑复杂扰动下航天器编队姿态的协同控制问题。然而现有的航天器编队控制一般假定确定性扰动上界是已知的,然而在实际应用中通常很难获取确定性扰动上界,并且特定科学实验存在姿态限制要求,因此实际控制精度有待提高。
3、公开号为cn107422641a的发明专利公开了一种复杂约束条件下的航天器编队姿态有限时间协同控制方法,其通过设计扩张观测器实时估计系统未知角速度和耦合扰动,而后基于有限时间滑模控制理论设计分布式控制协议,能够实现对复杂约束条件下的航天器编队姿态的控制。但是其主要考虑了未知角速度和外部扰动的耦合扰动,未考虑姿态限制要求,也不能确在保姿态限制要求下,扰动上界未知和存在随机扰动等复杂扰动情况下的柔性体航天器编队姿态协调控制能够顺利实施,实际控制效果不佳。
技术实现思路
1、有鉴于此,本发明提出了一种复杂扰动下柔性体航天器编队限制性姿态调节控制方法,用于解决现有技术不能有效进行柔性体航天器编队的限制性姿态控制的问题。
2、本发明提出一种复杂扰动下柔性体航天器编队限制性姿态调节控制方法,所述方法包括:
3、建立航天器编队的姿态动力学方程,并基于姿态误差和角速度误差建立航天器编队的姿态协同控制系统;
4、考虑航天器的姿态限制,设计航天器的人工势函数;
5、将人工势函数方法与滑模控制方法相结合,分别设计在不同扰动情况下的人工势函数-超螺旋滑膜控制的控制律;
6、根据人工势函数-超螺旋滑膜控制的控制律分别进行不同扰动情况下的航天器编队姿态调节控制;
7、判断航天器编队的姿态协同控制系统是否停留在不希望的平衡点,若是,调整人工势函数-超螺旋滑膜控制的控制律,逃离不希望的平衡点。
8、在以上技术方案的基础上,优选的,其特征在于,所述航天器的姿态协同控制系统为:
9、
10、
11、其中,i=1,2,...,n,n为航天器编队中的航天器总数,ri表示第i个柔性体航天器从其物体坐标系到惯性坐标系的旋转矩阵,为旋转矩阵ri与期望姿态rd的旋转矩阵误差,为第i个航天器的姿态误差向量,tr(·)为迹函数,i为单位矩阵,是第i个柔性体航天器的惯性矩阵,是刚性-弹性矩阵;代表第i个航天器在惯性坐标系下的角速度,表示期望角速度,为角速度误差,是ωi的反对称矩阵,ui表示控制力矩,di代表确定性扰动,ξi代表随机扰动。
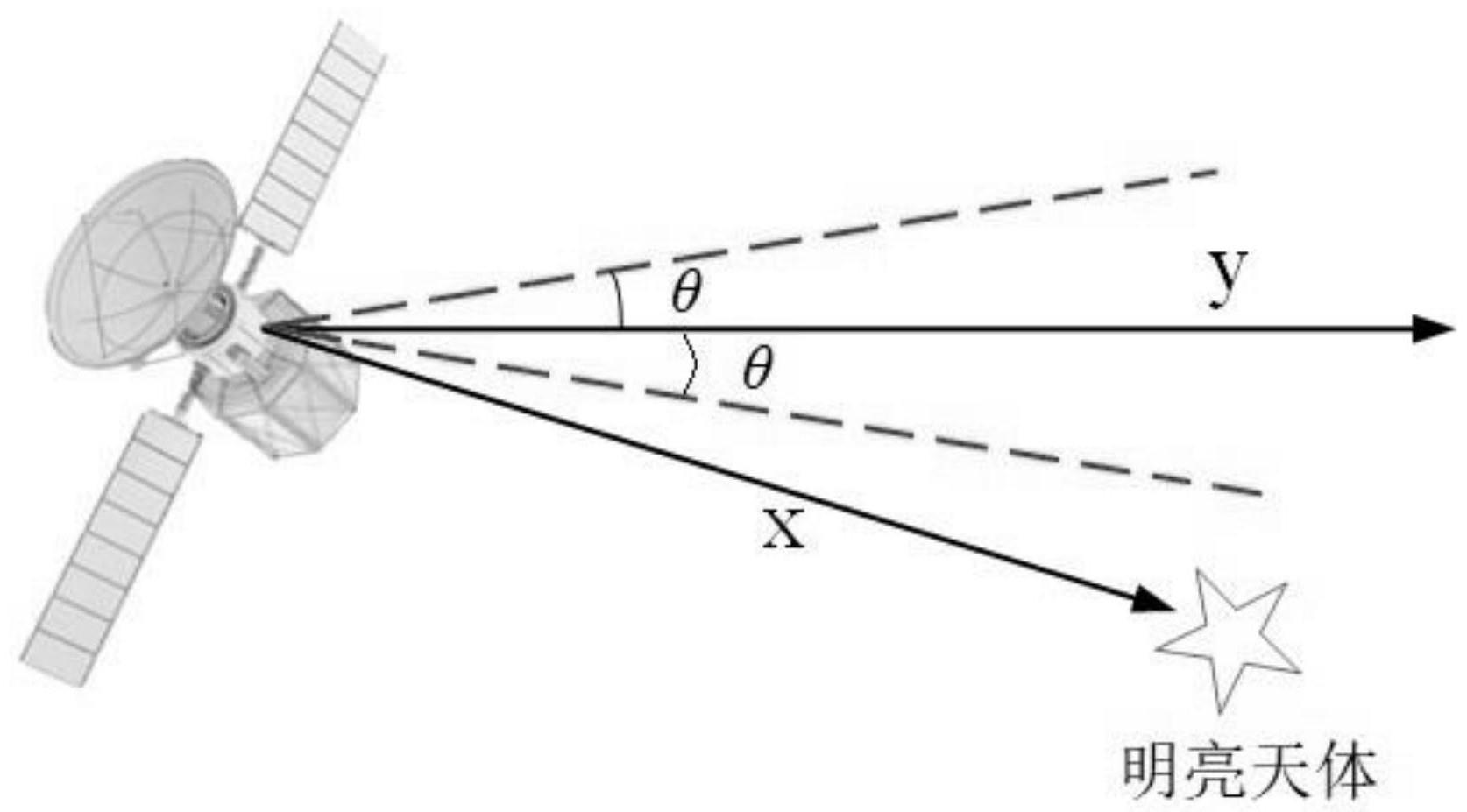
12、在以上技术方案的基础上,优选的,设第i个航天器上共有n1个敏感仪器、对应n2个明亮天体,所述考虑航天器的姿态限制,设计航天器的人工势函数的公式为:
13、
14、其中,代表第i个航天器的人工势函数,αv>0是一个常数,i3是3阶单位矩阵,表示第q2个明亮天体的方向矢量,表示第q1个敏感仪器的方向矢量,q1=1,2,...,n1,q2=1,2,...,n2,表示与之间设定的最小角度;
15、期望姿态rd是常值,并且rd∈ξi,其中表示姿态容许区域的集合。
16、在以上技术方案的基础上,优选的,在确定性扰动上界已知的情况下,设计人工势函数-超螺旋滑膜控制的控制律的过程为:
17、人工势函数相对于角速度的梯度项yi引入到滑动流形si的设计中,设计的滑膜面为:
18、
19、其中,c>0,v1>0,λi(t)是一个具有正初始值的时变函数,t表示时间,λi(t)的二阶更新率为:
20、设确定性扰动di的上界为m1,设计人工势函数-超螺旋滑膜控制的控制律为:
21、
22、ui_1表示控制力矩即取值为,表示等效控制律,表示到达控制律;
23、等效控制律设计为:
24、
25、到达控制律设计为:
26、
27、对于给定的向量和实数0<r<1,sig(·)函数定义为如下形式:
28、sig(x)r=[|x1|rsign(x1),|x2|rsign(x2),|x3|rsign(x3)]t,
29、sign(·)为符号函数,x1、x2、x3分别为向量x的3个分量,α、β为常数系数,si(t)为滑动流形,τ为时间变量。
30、在以上技术方案的基础上,优选的,在确定性扰动上界未知的情况下,设计人工势函数-超螺旋滑膜控制的控制律为:
31、
32、ui_2表示控制力矩,表示等效控制律,表示到达控制律;
33、到达控制律设计为:
34、
35、其中,其中
36、lij(t)的更新率设计为:
37、
38、其中,lm>0,yij(0)=0;fij为向量fi的第j个分量,其中γ是正常数。
39、在以上技术方案的基础上,优选的,在同时存在确定性扰动和随机噪声的复杂扰动情况下,设计人工势函数-超螺旋滑膜控制的控制律为:
40、
41、其中,ui_3为控制力矩,是等效控制律,是到达控制律,用来处理系统随机不确定性的控制律;
42、到达控制律设计为:
43、
44、其中
45、lij(t)的更新律为:
46、
47、其中,lm>0,lij(0)=l0,ε0>0;
48、用来处理系统随机不确定性的控制律为:
49、
50、是一个基于lyapunov函数的控制律增益。
51、在以上技术方案的基础上,优选的,基于lyapunov函数的控制律增益的公式为:
52、
53、其中,χi1=si(t),
54、且yi(0)=0;
55、如果且||χi2||1>0ε分别为大于0的常数。
56、在以上技术方案的基础上,优选的,所述判断航天器编队的姿态协同控制系统是否停留在不希望的平衡点,若是,调整人工势函数-超螺旋滑膜控制律的参数,逃离不希望的平衡点具体包括:
57、记参数nadd、madd为能量增加次数,并将初始值分别定义为0;
58、当||yi||<0.001时,判断是否有若是,则当前航天器编队的姿态协同控制系统是否停留在不希望的平衡点,此时,若则令λi(t)的二阶更新率为其中δ(t)为单位脉冲函数,kadd为δ(t)的系数,并且将nadd取值记为nadd+1,否则,在到达控制律的积分项中添加kaddmaddδ(t),并且将madd取值记为madd+1。
59、本发明相对于现有技术具有以下有益效果:
60、1)本发明考虑航天器姿态限制设计了航天器的人工势函数,并将人工势函数方法与滑模控制方法相结合,分别设计了在不同扰动情况下的人工势函数-超螺旋滑膜控制的控制律,与不考虑姿态限制的控制器相比,本发明的控制律可以有效处理航天器的姿态限制问题,从而完成特定的科学任务,比如在姿态调节过程中姿态限制可以避免敏感仪器直射明亮天体,进而延长敏感仪器使用寿命;
61、2)本发明基于姿态的旋转矩阵进行滑模面设计和控制律设计,与基于欧拉角、修正的罗德里格斯参数和单位四元数等姿态描述方式的控制器相比,本发明可以避免使用欧拉角和修正的罗德里格斯参数导致的运动学奇异性和几何奇异性,同时可以避免使用单位四元数导致的姿态展开现象;此外,与针对刚性航天器设计的控制器相比,本发明考虑了柔性部件振动对姿态控制系统的影响,更贴近于实际应用;
62、3)本发明分别设计了在确定性扰动上界已知的情况下、在确定性扰动上界未知的情况下和同时存在确定性扰动和随机噪声的复杂扰动情况下的人工势函数-超螺旋滑膜控制律,与扰动上界已知的控制器相比,本发明可以进行扰动上界未知的情况下航天器限制姿态控制,降低了控制器要求,更贴近于实际应用;与考虑了认知不确定性的控制器相比,本发明额外考虑了随机不确定性的影响,这种不确定性在系统中总是存在且无法消除,因此本发明开展随机不确定性下的姿态协同控制研究也具有积极意义。
- 还没有人留言评论。精彩留言会获得点赞!