半导体物料搬送的控制方法、装置、设备、介质及产品与流程
本发明实施例涉及控制,尤其涉及一种半导体物料搬送的控制方法、装置、设备、计算机可读存储介质及计算机程序产品。
背景技术:
1、在半导体生产过程中,当工艺设备需要物料时,通常通过搬送设备从仓库将物料搬送至该工艺设备,以满足该工艺设备的生产需要。
2、通常情况下,当工艺设备需要物料时,会将装载口为空的状态通过设备自动化系统(equipment automation program,eap)上报至制造执行系统(manufacturingexecution system,mes),制造执行系统生成将物料从仓库搬送至该工艺设备的命令,然后将该命令发送至物料控制系統(material control system,mcs),物料控制系统根据该命令发送至对应的搬送设备控制器,设备控制器根据该命令控制搬送设备按照该命令将物料从仓库搬送至该工艺设备。
3、但是在实际过程中,工艺设备可能存在异常,而搬送设备只有在到达工艺设备的装载口时才能获知该异常情况,因此搬送的路程和时间被浪费,影响搬送效率。
4、因此,业界亟需一种搬送效率较高的半导体物料搬送的控制方法。
技术实现思路
1、有鉴于此,本发明实施例期望提供一种半导体物料搬送的控制方法,该方法能够提高半导体物料的搬送效率。本申请还提供了该方法对应的装置、设备、介质以及程序产品。
2、本发明实施例的技术方案是这样实现的:
3、第一方面,本发明实施例提供了一种半导体物料搬送的控制方法,所述方法应用于搬送设备控制器,包括:
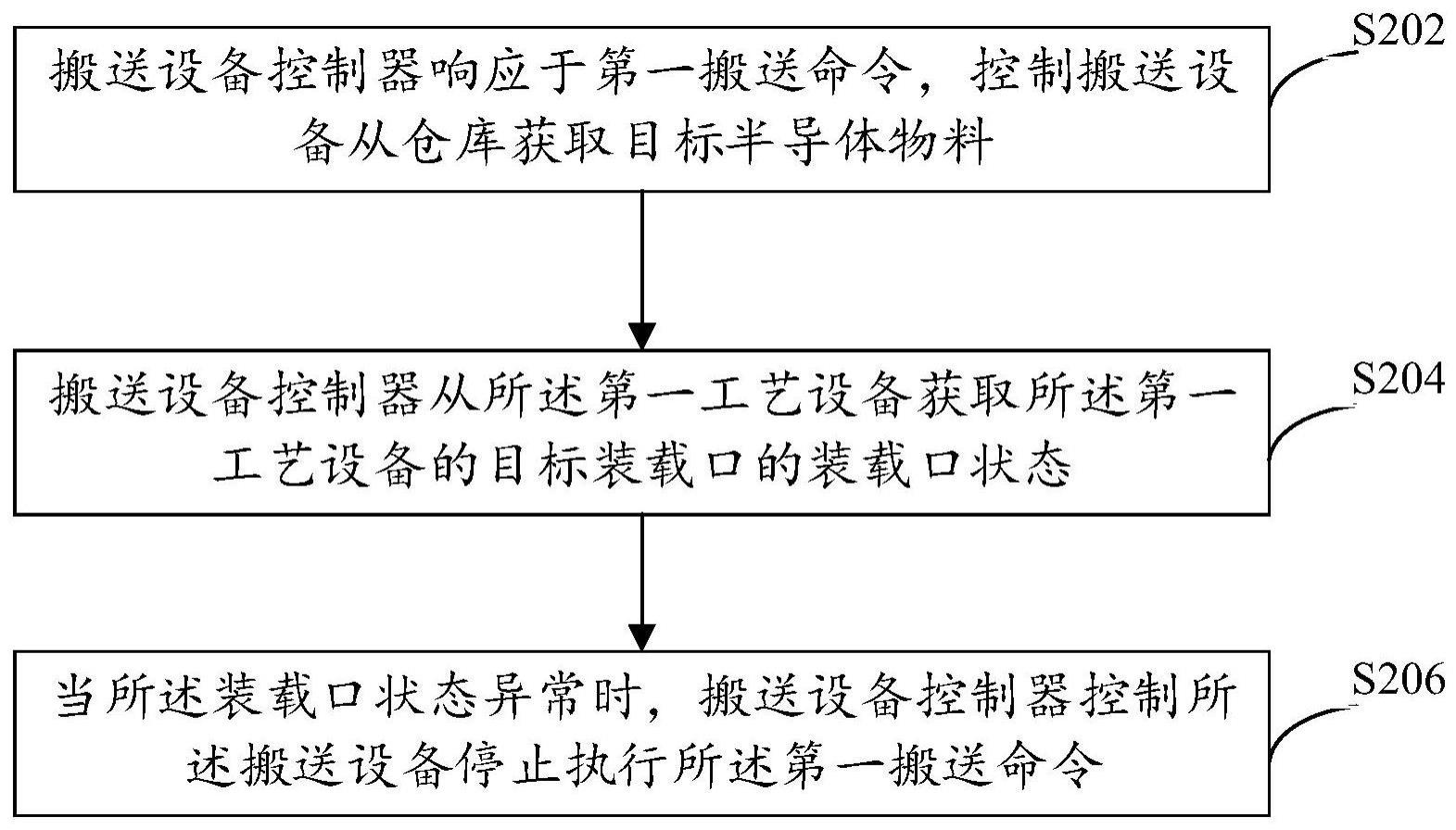
4、响应于第一搬送命令,控制搬送设备从仓库获取目标半导体物料,所述第一搬送命令包括从所述仓库搬送所述目标半导体物料至第一工艺设备的目标装载口;
5、从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态;
6、当所述装载口状态异常时,控制所述搬送设备停止执行所述第一搬送命令。
7、在一些可能的实现方式中,所述方法还包括:
8、上报所述装载口的异常状态;
9、获取第二搬送命令,所述第二搬送命令包括搬送所述目标半导体物料至第二工艺设备的目标装载口;
10、控制所述搬运设备将所述目标半导体物料搬送至所述第二工艺设备的目标装载口。
11、在一些可能的实现方式中,所述从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态,包括:
12、通过工业以太网协议通讯方式,从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态。
13、在一些可能的实现方式中,所述搬运设备包括自动导向搬运车和空中走行式无人搬送车中的至少一种。
14、在一些可能的实现方式中,所述从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态,包括:
15、从所述第一工艺设备的目标装载口获取所述第一工艺设备的目标装载口的装载口状态。
16、在一些可能的实现方式中,所述从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态,包括:
17、按照固定的周期从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态。
18、第二方面,本发明实施例提供了一种半导体物料搬送的控制装置,所述装置部署于搬送设备控制器,包括:
19、控制模块,用于响应于第一搬送命令,控制搬送设备从仓库获取目标半导体物料,所述第一搬送命令包括从所述仓库搬送所述目标半导体物料至第一工艺设备的目标装载口;
20、通信模块,用于从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态;
21、所述控制模块,还用于当所述装载口状态异常时,控制所述搬送设备停止执行所述第一搬送命令。
22、在一些可能的实现方式中,所述通信模块还用于:
23、上报所述装载口的异常状态;
24、获取第二搬送命令,所述第二搬送命令包括搬送所述目标半导体物料至第二工艺设备的目标装载口;
25、所述控制模块还用于控制所述搬运设备将所述目标半导体物料搬送至所述第二工艺设备的目标装载口。
26、在一些可能的实现方式中,所述通信模块具体用于:
27、通过工业以太网协议通讯方式,从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态。
28、在一些可能的实现方式中,所述搬运设备包括自动导向搬运车和空中走行式无人搬送车中的至少一种。
29、在一些可能的实现方式中,所述通信模块具体用于:
30、从所述第一工艺设备的目标装载口获取所述第一工艺设备的目标装载口的装载口状态。
31、在一些可能的实现方式中,所述通信模块具体用于:
32、按照固定的周期从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态。
33、第三方面,本发明实施例提供了一种设备,设备包括处理器和存储器。处理器、存储器进行相互的通信。处理器用于执行存储器中存储的指令,以使得设备执行如第一方面或第一方面的任一种实现方式中的半导体物料搬送的控制方法。
34、第四方面,本申请提供一种计算机可读存储介质,计算机可读存储介质中存储有指令,指令指示设备执行上述第一方面或第一方面的任一种实现方式所述的半导体物料搬送的控制方法。
35、第五方面,本申请提供了一种包含指令的计算机程序产品,当其在设备上运行时,使得设备执行上述第一方面或第一方面的任一种实现方式所述的半导体物料搬送的控制方法。
36、本申请在上述各方面提供的实现方式的基础上,还可以进行进一步组合以提供更多实现方式。
37、从以上技术方案可以看出,本申请实施例具有以下优点:
38、本发明实施例提供了一种半导体物料搬送的控制方法,该方法通过搬送设备控制器响应于第一搬送命令,控制搬送设备从仓库获取目标半导体物料,其中第一搬送命令包括从该仓库搬送该目标半导体物料至第一工艺设备的目标装载口,然后从该第一工艺设备获取第一工艺设备的目标装载口的装载口状态,当该装载口状态异常时,控制该搬送设备停止执行该第一搬送命令。由此,在搬送过程中,搬送设备可以及时获取目标装载口的装载口状态,当异常时控制搬送设备及时停止,从而避免无效搬送,提高搬送效率。
技术特征:
1.一种半导体物料搬送的控制方法,其特征在于,所述方法应用于搬送设备控制器,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态,包括:
4.根据权利要求1所述的方法,其特征在于,所述搬运设备包括自动导向搬运车和空中走行式无人搬送车中的至少一种。
5.根据权利要求1所述的方法,其特征在于,所述从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态,包括:
6.根据权利要求1所述的方法,其特征在于,所述从所述第一工艺设备获取所述第一工艺设备的目标装载口的装载口状态,包括:
7.一种半导体物料搬送的控制装置,其特征在于,所述装置部署于搬送设备控制器,所述装置包括:
8.一种设备,其特征在于,所述设备包括处理器和存储器;
9.一种计算机可读存储介质,其特征在于,包括指令,所述指令指示设备执行如权利要求1至6中任一项所述的方法。
10.一种计算机程序产品,其特征在于,当所述计算机程序产品在计算机上运行时,使得计算机执行如权利要求1至6中任一项所述的方法。
技术总结
本发明实施例公开了一种半导体物料搬送的控制方法、装置、设备、介质及产品,该方法应用于搬送设备控制器,通过搬送设备控制器响应于第一搬送命令,控制搬送设备从仓库获取目标半导体物料,其中第一搬送命令包括从该仓库搬送该目标半导体物料至第一工艺设备的目标装载口,然后从该第一工艺设备获取第一工艺设备的目标装载口的装载口状态,当该装载口状态异常时,控制该搬送设备停止执行该第一搬送命令。由此,在搬送过程中,搬送设备可以及时获取目标装载口的装载口状态,当异常时控制搬送设备及时停止,从而避免无效搬送,提高搬送效率。
技术研发人员:赵莉飞,张超,刘永亮
受保护的技术使用者:西安奕斯伟材料科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!