船舶柴油机转速PID控制器参数调整方法及装置
涉及船舶柴油机调速系统优化,具体涉及基于负载扰动识别的船舶柴油机转速pid控制器参数调整方法。
背景技术:
1、船舶柴油机调速系统的作用是在船舶柴油机的各种工况中,在因外界环境扰动影响而造成负荷变化的情况下,能及时地调整与负荷变化相匹配的喷油量,从而保证船舶柴油机在目标转速稳定高效运行。pid控制算法具有易于工程实现、鲁棒性强的特点,非常适用于柴油机调速控制系统。船舶柴油机转速pid控制器存在如下两个问题:第一、船舶柴油机转速pid控制器的参数直接影响着柴油机调速系统的超调量、调节时间和稳态误差等动稳态性能,不同的参数选择会始调速系统具有不同的控制性能,传统的pid控制器往往通过离线整定的方法设置控制参数,使控制系统具有良好的稳态性能。第二,船舶柴油机运行过程中有着不同的工作状态,船舶柴油机调速控制系统对于不同的工况具有不同的控制性能要求,当柴油机负载扰动频繁时,应尽可能提高系统的响应速度,并允许较大的稳态转速波动率,加强系统抗干扰能力。传统船舶柴油机pid控制器的三个参数根据经验公式离线整定后无法修改,且往往只注重于稳态性能,在船舶主柴油机负载扰动频繁工况下无法及时调整以保证良好的动态性能。
2、在目前船舶柴油机调速系统优化领域,也相继提出了对船舶柴油机转速pid控制器参数的实时调整方法,然而这些方法没有考虑船舶柴油机对不同工况具有不同的控制性能要求,没有涉及对工况进行识别的内容,例如:公开号cn111711400a(公开日2020年9月25日)的专利文件中公开了一种基于bp模糊神经网络的pid调速方法及其系统,提出了一种通过使用bp模糊神经网络改进pid调速系统的方法,有效降低了效应时间和调节时间,使得调速系统具有更强的抗干扰能力,而没有涉及对干扰频繁工况的识别方法。
3、公开号cn108809167a(公开日2018年11月13日)的专利文件中公开了一种基于模糊控制的bp神经网络pid调速控制算法,确定bp网络的结构后计算网络各层的输入和输出,再根据增量式pid控制算法计算控制器的输出,利用bp网络的自学习能力对pid控制器的参数实时在线调整,而没有涉及对干扰频繁工况的识别方法。
4、船舶柴油机遭遇负载扰动频繁的工作状态时,传统船舶柴油机调速系统无法识别此时工况,因而不能修改船舶柴油机转速pid控制器的参数以满足此时的调速特性需求。
技术实现思路
1、为解决现有技术中存在的,现有技术中对pid控制器的参数实时在线调整的技术比较完善,但是缺乏对干扰频繁工况的识别方法的技术问题,本发明提供的技术方案为:
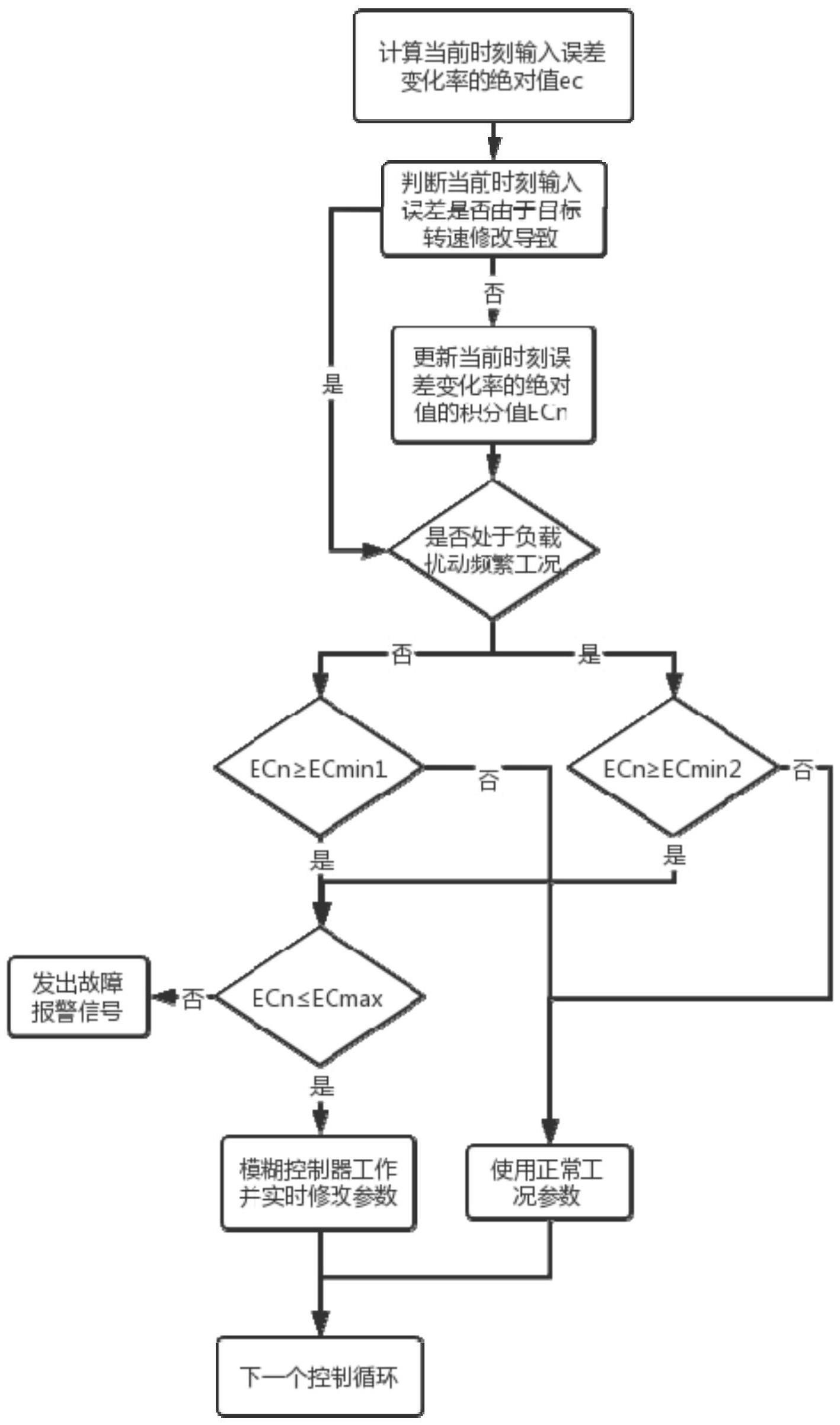
2、船舶柴油机转速pid控制器参数调整方法,所述方法包括:
3、步骤一:采集当前输入转数误差变化率的绝对值的积分值;
4、步骤二:采集当前输入转数偏差,若所述偏差小于或等于预设偏差阈值,则执行步骤三;
5、步骤三:判断当前工况下,所述积分值是否达到预设最小控制阈值,若是,则执行步骤四,否则执行步骤五;
6、步骤四:判断所述积分值是否达到预设最大控制阈值,若不是,则执行步骤六,否则执行步骤七;
7、步骤五:修改柴油机当前转速pid控制器参数为正常工作状态的控制参数,并返回步骤一;
8、步骤六:修改柴油机当前转速pid控制器参数为匹配负载扰动频繁工作状态的的控制参数,同时,模糊控制器工作并输出pid三个参数的增量对pid控制器参数进行实时调整,并返回步骤一;
9、步骤七:发出故障报警信号。
10、进一步,提供一个优选实施方式,所述步骤二还包括:
11、步骤二一:更新当前时刻的积分值;并执行步骤二二;
12、步骤二二:判断当前工况是否处于负载扰动频繁工况,并执行步骤三;
13、若所述偏差小于或等于预设偏差阈值,则执行步骤三,否则执行步骤二一。
14、进一步,提供一个优选实施方式,所述步骤二二中,判断方法具体为:通过模糊控制器是否工作来判断。
15、进一步,提供一个优选实施方式,所述步骤三具体包括:
16、步骤三一:判断当前时刻的积分值是否达到最小控制阈值二,若是,则执行步骤四,否则执行步骤五;
17、步骤三二:判断当前时刻的积分值是否达到最小控制阈值一,若是,则执行步骤四,否则执行步骤五;
18、当所述步骤二二的判断结果为是,则执行步骤三一,否则执行步骤三二。
19、进一步,提供一个优选实施方式,所述最小控制阈值二的值小于所述最小控制阈值一。
20、进一步,提供一个优选实施方式,所述步骤六中,所述pid三个参数具体为:惯性系数、积分值系数和微分系数。
21、进一步,提供一个优选实施方式,所述步骤七中,所述报警信号向船舶柴油机调速系统发出。
22、基于同一发明构思,本发明还提供了船舶柴油机转速pid控制器参数调整装置,所述装置包括:
23、模块一:用于采集当前输入转数误差变化率的绝对值的积分值;
24、模块二:用于采集当前输入转数偏差,若所述偏差小于或等于预设偏差阈值,则执行模块三;
25、模块三:用于判断当前工况下,所述积分值是否达到预设最小控制阈值,若是,则执行模块四,否则执行模块五;
26、模块四:用于判断所述积分值是否达到预设最大控制阈值,若不是,则执行模块六,否则执行模块七;
27、模块五:用于修改柴油机当前转速pid控制器参数为正常工作状态的控制参数,并返回模块一;
28、模块六:用于修改柴油机当前转速pid控制器参数为匹配负载扰动频繁工作状态的的控制参数,同时,模糊控制器工作并输出pid三个参数的增量对pid控制器参数进行实时调整,并返回模块一;
29、模块七:用于发出故障报警信号。
30、基于同一发明构思,本发明还提供了计算机储存介质,用于储存计算机程序,所述计算机程序用于被计算机读取,使其执行所述的船舶柴油机转速pid控制器参数调整方法。
31、基于同一发明构思,本发明还提供了计算机,包括处理器和储存介质,当所述处理器读取所述储存介质中储存的计算机程序时,所述计算机执行所述的船舶柴油机转速pid控制器参数调整方法。
32、与现有技术相比,本发明提供的技术方案的有益之处在于:
33、本发明提供的船舶柴油机转速pid控制器参数调整方法,解决了船舶柴油机遭遇负载扰动频繁的工作状态时,传统船舶柴油机调速系统无法识别此时工况,因而不能修改船舶柴油机转速pid控制器的参数以满足此时的调速特性需求这一问题。
34、本发明提供的船舶柴油机转速pid控制器参数调整方法,提出了对一段时间内实际转速和目标转速之间的误差变化率的绝对值进行积分,依靠此积分值判断船舶柴油机是否进入负载扰动频繁的工作状态,进而通过模糊控制器对船舶柴油机转速pid控制器参数进行实时调整使其拥有良好的动态性能及抗扰动能力的方法。
35、本发明提供的船舶柴油机转速pid控制器参数调整方法,可以自动判断船舶柴油机是否进入负载扰动频繁的工作状态。进而对pid控制器参数进行实时在线调整,从而匹配此工况下船舶柴油机对于调速特性的需求,使得船舶柴油机调速系统的响应速度以及抗干扰能力提高。
36、本发明提供的船舶柴油机转速pid控制器参数调整方法,可以避免船舶柴油机转速pid控制器稳态时参数的频繁改动,以及识别工况的频繁变化,保证了船舶柴油机调速系统的稳定性。
37、本发明提供的船舶柴油机转速pid控制器参数调整方法,当柴油机调速系统出现异常状态时,将自动发出故障报警信号,可以有效防止船舶柴油机在故障状态下工作受损。
38、适合应用于保证船舶柴油机在目标转速稳定高效运行的工作中。
- 还没有人留言评论。精彩留言会获得点赞!