巷道无人机的抗风控制方法和装置与流程
本申请涉及无人机,尤其涉及一种巷道无人机的抗风控制方法、装置、电子设备和存储介质。
背景技术:
1、目前,多旋翼无人机因其灵活性,被广泛应用于军事领域、民事企业和人民生活中,其飞行环境和自身一般会存在大量的扰动和不确定,其中,外界风对无人机的影响尤为显著,相关技术中,对外界风影响下无人机抗干扰控制,主要的手段有h无穷、滑模、自抗扰、比例-积分-微分控制器(proport ion i ntegrat ion different iat ion,pi d)等鲁棒控制方法,观测器和控制器综合的控制方法,自适应控制方法等,然而上述方法对于具有随机特性的紊流风场,无法估计出随机特性和抗风的干扰评估,也无法保障紊流风场无人机的安全性,故亟需一种更可靠的巷道无人机的抗风控制方法。
技术实现思路
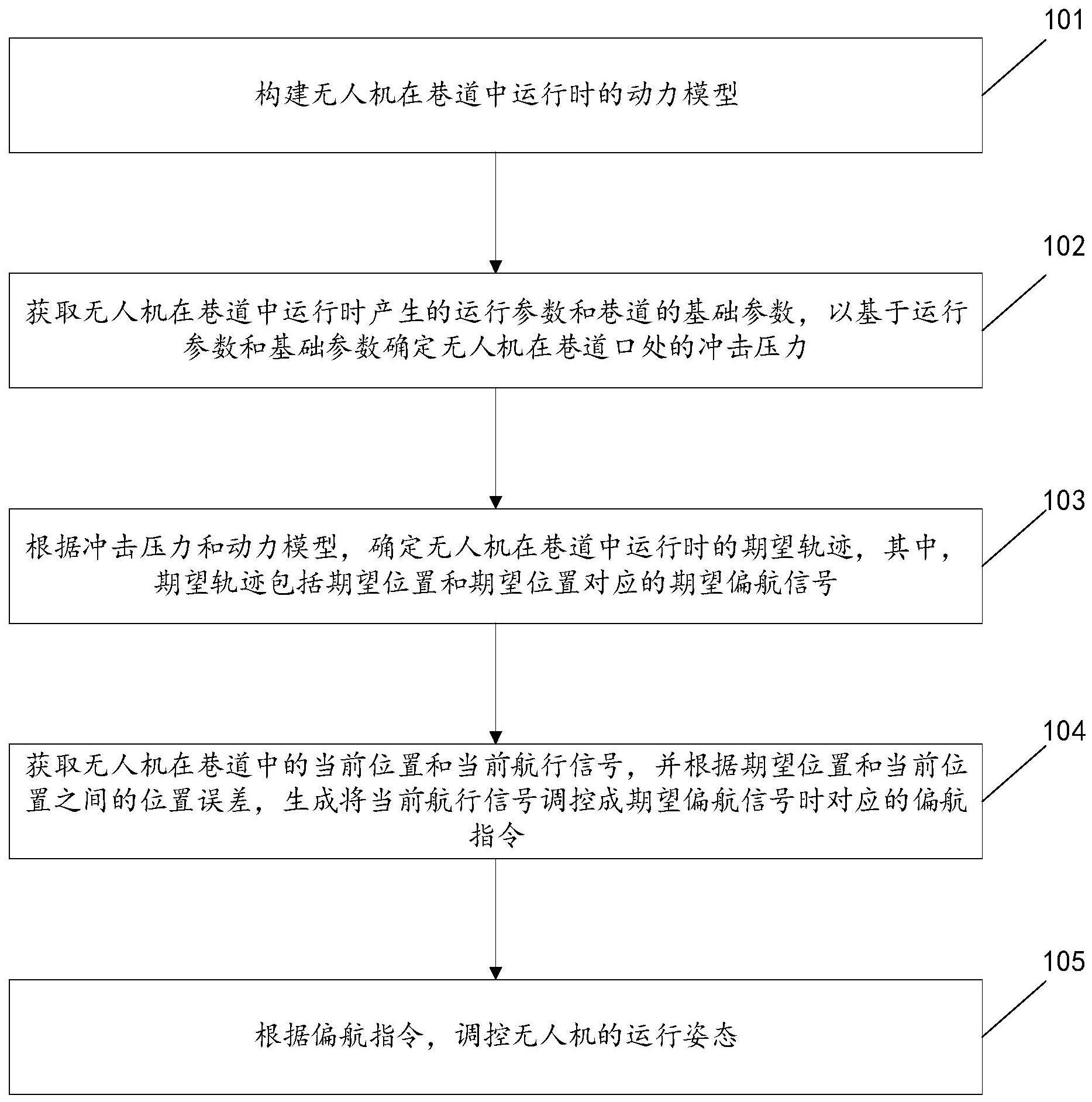
1、本申请第一方面实施例提出了一种巷道无人机的抗风控制方法,所述方法包括:构建无人机在巷道中运行时的动力模型;获取无人机在巷道中运行时产生的运行参数和所述巷道的基础参数,以基于所述运行参数和基础参数确定所述无人机在巷道口处的冲击压力;根据所述冲击压力和动力模型,确定无人机在巷道中运行时的期望轨迹,其中,所述期望轨迹包括期望位置和所述期望位置对应的期望偏航信号;获取无人机在巷道中的当前位置和当前航行信号,并根据所述期望位置和所述当前位置之间的位置误差,生成将所述当前航行信号调控成所述期望偏航信号时对应的偏航指令;根据所述偏航指令,调控所述无人机的运行姿态。
2、在本申请的一个实施例中,所述获取无人机在巷道中运行时产生的运行参数和所述巷道的基础参数,以基于所述运行参数和基础参数确定所述无人机在巷道口处的冲击压力,包括:获取无人机在巷道中运行时产生的运行参数和所述巷道的基础参数,其中,所述运行参数包括无人机在巷道内外之间的气压差和无人机在当前飞行速度下产生的风速,所述基础参数包括巷道口的断面面积;根据所述无人机在巷道内外之间的气压差、无人机在当前飞行速度下产生的风速、以及巷道口的断面面积,确定所述无人机在巷道口处的冲击压力。
3、在本申请的一个实施例中,所述根据所述无人机在巷道内外之间的气压差、无人机在当前飞行速度下产生的风速、以及巷道口的断面面积,确定所述无人机在巷道口处的冲击压力,包括:根据所述无人机在巷道内外之间的气压差、无人机在当前飞行速度下产生的风速、以及巷道口的断面面积,确定无人机前向飞行力、巷道风阻力;将所述无人机在巷道内外之间的气压差、无人机前向飞行力以及巷道风阻力之和作为所述无人机在巷道口处的冲击压力。
4、在本申请的一个实施例中,所述根据所述偏航指令,调控所述无人机的运行姿态,包括:获取所述无人机在巷道中当前位置对应的无人机俯仰角、无人机滚转角和无人机偏航角;根据所述无人机俯仰角、无人机滚转角和无人机偏航角和所述偏航指令的误差,调控无人机的运行姿态。
5、本申请提出一种巷道无人机的抗风控制方法,构建无人机在巷道中运行时的动力模型,基于无人机在巷道中运行时产生的运行参数和巷道的基础参数,确定无人机在巷道口处的冲击压力,根据冲击压力和动力模型,确定无人机的期望轨迹,期望轨迹包括期望位置和期望偏航信号,获取无人机在巷道中的当前位置和当前航行信号,并根据期望位置和当前位置之间的位置误差,生成将当前航行信号调控成期望偏航信号时对应的偏航指令,根据偏航指令,调控无人机的运行姿态,由此,基于无人机在巷道口处的冲击压力,确定无人机在巷道中运行时的期望轨迹,以生成调控无人机的偏航指令,实现无人机运行姿态的抗风调控,保障无人机出巷道时的安全性。
6、本申请第二方面实施例提出了一种巷道无人机的抗风控制装置,所述装置包括:构建模块,用于建立无人机在巷道中运行时的动力模型;第一确定模块,用于获取无人机在巷道中运行时产生的运行参数和所述巷道的基础参数,以基于所述运行参数和基础参数确定所述无人机在巷道口处的冲击压力;第二确定模块,用于根据所述冲击压力和动力模型,确定无人机在巷道中运行时的期望轨迹,其中,所述期望轨迹包括期望位置和所述期望位置对应的期望偏航信号;生成模块,用于获取无人机在巷道中的当前位置和当前航行信号,并根据所述期望位置和所述当前位置之间的位置误差,生成将所述当前航行信号调控成所述期望偏航信号时对应的偏航指令;调控模块,用于根据所述偏航指令,调控所述无人机的运行姿态。
7、在本申请的一个实施例中,所述第一确定模块,包括:获取单元,用于获取无人机在巷道中运行时产生的运行参数和所述巷道的基础参数,其中,所述运行参数包括无人机在巷道内外之间的气压差和无人机在当前飞行速度下产生的风速,所述基础参数包括巷道口的断面面积;确定单元,用于根据所述无人机在巷道内外之间的气压差、无人机在当前飞行速度下产生的风速、以及巷道口的断面面积,确定所述无人机在巷道口处的冲击压力。
8、在本申请的一个实施例中,所述确定单元,具体用于:根据所述无人机在巷道内外之间的气压差、无人机在当前飞行速度下产生的风速、以及巷道口的断面面积,确定无人机前向飞行力、巷道风阻力;将所述无人机在巷道内外之间的气压差、无人机前向飞行力以及巷道风阻力之和作为所述无人机在巷道口处的冲击压力。
9、在本申请的一个实施例中,所述调控单元,具体用于:获取所述无人机在巷道中当前位置对应的无人机俯仰角、无人机滚转角和无人机偏航角;根据所述无人机俯仰角、无人机滚转角和无人机偏航角和所述偏航指令的误差,调控无人机的运行姿态。
10、本申请提出一种巷道无人机的抗风控制装置,构建无人机在巷道中运行时的动力模型,基于无人机在巷道中运行时产生的运行参数和巷道的基础参数,确定无人机在巷道口处的冲击压力,根据冲击压力和动力模型,确定无人机的期望轨迹,期望轨迹包括期望位置和期望偏航信号,获取无人机在巷道中的当前位置和当前航行信号,并根据期望位置和当前位置之间的位置误差,生成将当前航行信号调控成期望偏航信号时对应的偏航指令,根据偏航指令,调控无人机的运行姿态,由此,基于无人机在巷道口处的冲击压力,确定无人机在巷道中运行时的期望轨迹,以生成调控无人机的偏航指令,实现无人机运行姿态的抗风调控,保障无人机出巷道时的安全性。
11、本申请第三方面实施例提出了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,当所述处理器执行所述程序时实现本申请实施例中的巷道无人机的抗风控制方法。
12、本申请第四方面实施例提出了一种计算机可读存储介质,其上存储有计算机程序,当该程序被处理器执行时本申请实施例中的巷道无人机的抗风控制方法。
13、上述可选方式所具有的其他效果将在下文中结合具体实施例加以说明。
技术特征:
1.一种巷道无人机的抗风控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述获取无人机在巷道中运行时产生的运行参数和所述巷道的基础参数,以基于所述运行参数和基础参数确定所述无人机在巷道口处的冲击压力,包括:
3.如权利要求2所述的方法,其特征在于,所述根据所述无人机在巷道内外之间的气压差、无人机在当前飞行速度下产生的风速、以及巷道口的断面面积,确定所述无人机在巷道口处的冲击压力,包括:
4.如权利要求1所述的方法,其特征在于,所述根据所述偏航指令,调控所述无人机的运行姿态,包括:
5.一种巷道无人机的抗风控制装置,其特征在于,所述装置包括:
6.如权利要求5所述的装置,其特征在于,所述第一确定模块,包括:
7.如权利要求6所述的装置,其特征在于,所述确定单元,具体用于:
8.如权利要求5所述的装置,其特征在于,所述调控单元,具体用于:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-4中任一所述的巷道无人机的抗风控制方法。
技术总结
本申请提出一种巷道无人机的抗风控制方法和装置,包括:构建无人机在巷道中运行时的动力模型,基于无人机在巷道中运行时产生的运行参数和巷道的基础参数,确定无人机在巷道口处的冲击压力,根据冲击压力和动力模型,确定无人机的期望轨迹,期望轨迹包括期望位置和期望偏航信号,获取无人机在巷道中的当前位置和当前航行信号,并根据期望位置和当前位置之间的位置误差,生成将当前航行信号调控成期望偏航信号时对应的偏航指令,根据偏航指令,调控无人机的运行姿态,由此,基于无人机在巷道口处的冲击压力,确定无人机在巷道中运行时的期望轨迹,以生成调控无人机的偏航指令,实现无人机运行姿态的抗风调控,保障无人机出巷道时的安全性。
技术研发人员:王丹丹,王保兵,王凯,高海跃
受保护的技术使用者:北京天玛智控科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!