水面无人艇的跟踪控制器设计方法
本发明涉及水面无人艇轨迹跟踪控制,具体而言,涉及一种水面无人艇基于学习预设性能弹性轨迹跟踪控制器设计方法。
背景技术:
1、水面无人艇具有高机动性、智能化、模块化等优势,在军事领域和民事领域得到广泛应用。然而,恶劣海况所引起的外部扰动和自身的非线性、模型不确定等因素,使得水面无人艇的轨迹跟踪控制问题变得更加复杂。值得注意,申请公布号cn 111158383 a和公布号cn 114442640a的专利申请,尽管实现水面无人艇精确的轨迹跟踪控制,但同时忽略跟踪误差收敛时的暂态性能(最大超调量、收敛时间、稳态误差等)。并且,申请公布号cn111158383 a和申请公布号cn 113671964 a的专利申请采用神经网络智能系统近似水面无人艇模型不确定部分和非线性,但忽略近似策略的初衷,仅仅采用跟踪误差来调节神经网络的权重。
2、此外,上述发明专利申请的控制方法都是基于时间控制框架,控制信号持续更新,传输大量的冗余数据,造成执行器的机械磨损;另外,执行器故障将会降低执行器的效率,导致跟踪精度下降,甚至造成水面无人艇闭环系统不稳定;然而,上述发明专利申请都假设执行器始终正常运行,显然不符合实行条件。
技术实现思路
1、为了解决现有技术中的不足,本发明针对含有外部未知扰动和执行器故障的水面无人艇提供一种基于学习预设性能弹性轨迹跟踪控制器设计方法,该方法保证水面无人艇在网络通信资源受限和执行器故障条件下,精准地沿着参考轨迹航行,并实现预设的暂态性能和稳态性能指标。
2、本发明采取的技术方案如下:
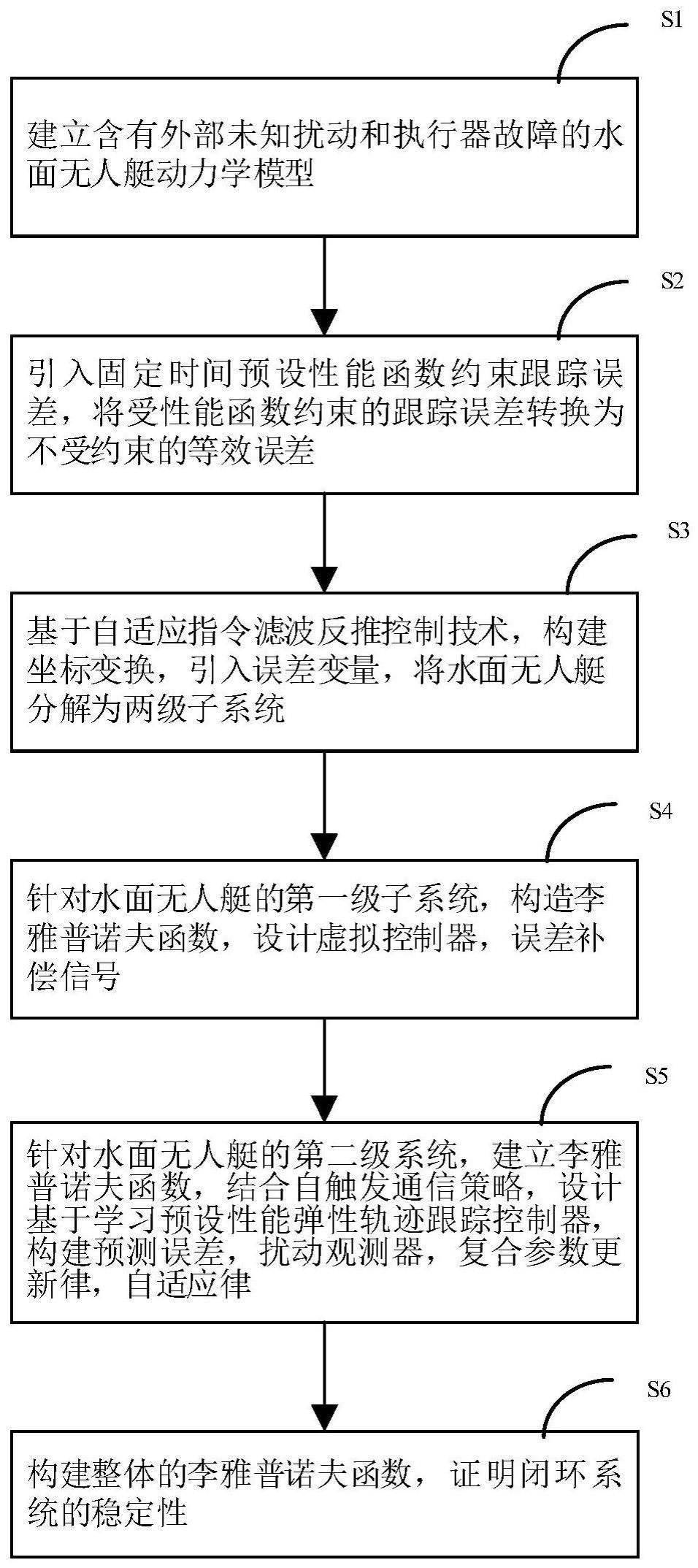
3、一种水面无人艇的跟踪控制器设计方法,包括以下步骤:
4、s1、构建带有外部未知扰动和执行器故障的水面无人艇的动力学模型;
5、s2、根据动力学模型,引入固定时间预设性能函数ιi(t)约束跟踪误差e1i(t),通过误差转换函数υi(ηi(t))和等式关系e1i(t)=ιi(t)υi(ηi(t)),将受到固定时间预设性能函数ιi(t)约束的跟踪误差e1i(t)转换为不受约束的等效误差
6、s3、根据等效误差基于自适应指令滤波反推控制方法,构建坐标变换方程,引入误差变量向量和将水面无人艇系统分解为两级子系统;
7、s4、基于坐标变换方程,针对水面无人艇系统的第一级子系统,建立李雅普诺夫函数v1,设计虚拟控制器α1和误差补偿信号使得水面无人艇的第一级子系统趋于稳定,进而获得待设计控制器增益;通过李雅普诺夫函数v1的时间导数确认虚拟控制器α1和误差补偿信号使得水面无人艇系统的第一级子系统趋于稳定;
8、s5、针对水面无人艇系统的第二级子系统,建立李雅普诺夫函数v2,引入自触发控制机制,设计基于学习预设性能弹性轨迹跟踪控制器κim(t),采用带有神经网络逼近的串并联估计模型获得预测误差λ2i,设计扰动观测器观测复合扰动,构建复合参数更新律自适应律和自适应律使得水面无人艇系统的第二级子系统趋于稳定,获得待设计控制器增益,通过李雅普诺夫函数v2的时间导数确认轨迹跟踪控制器κim(t)、扰动观测器复合参数更新律自适应律和自适应律使得水面无人艇系统的第二级子系统趋于稳定;
9、s6、针对水面无人艇系统构建整体的李雅普诺夫函数
10、v=v1+v2,
11、基于李雅普诺夫函数稳定理论,保证水面无人艇闭环系统的所有信号都是半全局最终一致有界,并且有效避免芝诺效应,实现期望的跟踪性能。
12、在本发明的一较佳实施方式中,步骤s1中,水面无人艇的动力学模型为:
13、
14、式中:为水面无人艇在(x,y)平面下的位置坐标以及在固定地面坐标系中的航向角为旋转矩阵,且满足u表示水面无人艇的前进速度,v表示水面无人艇的摇摆速度,r表示水面无人艇的转向角速度;其中δm,δc以及δd为模型不确定部分,为惯性矩阵,且满足为科里奥利和向心项的矩阵,且满足c(ν)=-ct(ν),为阻尼矩阵;且为外部未知扰动,且为水面无人艇的控制输入。
15、在本发明的一较佳实施方式中,水面无人艇故障模型为:
16、
17、式中:和为未知故障参数,为执行器效率系数,为执行器偏执故障,为理想控制输入,为故障的持续时间间隔,bim为已知控制器增益,m为执行器的个数,j为执行器故障的模式。
18、在本发明的一较佳实施方式中,步骤s2中,误差转换函数υi(ηi(t))为:
19、
20、在本发明的一较佳实施方式中,步骤s2中,固定时间预设性能函数ιi(t)为:
21、
22、式中:和为固定时间预设性能函数的初始值和稳态值,为待设计的收敛时间。
23、在本发明的一较佳实施方式中,步骤s3中,坐标变换方程为:
24、
25、式中:和为误差变量向量,为一阶滤波器的输出信号,一阶滤波器表示为:
26、
27、式中:γi为待设计的正参数,α1i为一阶滤波器的输入信号,和α1i(0)表示其初始值,为滤波误差。
28、在本发明的一较佳实施方式中,步骤s4中,李雅普诺夫函数v1为:
29、
30、在本发明的一较佳实施方式中,步骤s4中,虚拟控制器α1和误差补偿信号满足以下公式:
31、
32、
33、式中:和为正定矩阵,且和
34、为参考轨迹ζd的时间导数;为误差补偿信号的范数。
35、在本发明的一较佳实施方式中,步骤s5中,李雅普诺夫函数v2为:
36、
37、式中:和为估计误差,和分别为θ2i,d2i,π2i和ψ2i的估计值,λ2i,μ1和为正常数。
38、在本发明的一较佳实施方式中,自触发控制机制的触发规则表示为:
39、
40、
41、
42、
43、式中:i=1,2,3,δim,mim,nim,c2i,和ki为待设计控制器增益,||ei||为向量ei的范数,为两次成功触发之间的控制间隔,和nim为控制信号间隔的变化率,sign为符号函数,κim(t)为基于学习预设性能弹性轨迹跟踪控制器,为虚拟控制函数α2i的时间导数。
44、在本发明的一较佳实施方式中,预测误差满足其中和νi(0)代表其初始值,扰动观测器满足以下公式:
45、
46、
47、
48、式中:i=1,2,3,σ2i,和为待设计正常数;
49、复合参数更新律自适应律和自适应律满足以下公式:
50、
51、
52、
53、式中:λ1i,λ2i,和为待设计的参数。
54、与现有技术相比,本发明的有益效果是:
55、1)本发明提出的基于学习预设性能弹性轨迹跟踪控制器设计方法,解决传统预设性能控制技术中收敛时间无法定量表征的问题;通过设计误差补偿信号避免了传统自适应反推控制方法中复杂计算问题;保证水面无人艇闭环系统中所有信号都是半全局最终一致有界;简化了控制器设计复杂度,使跟踪误差具有独立于水面无人艇和性能函数初始条件的固定时间收敛性。
56、2)对rbfnns(径向基函数神经网络)近似目的进行重新审视,提出了基于扰动观测器的复合学习控制策略;通过带有神经网络逼近的串并联估计模型来获取预测误差,调节神经网络权重,提高了学习能力以及对非线性和模型不确定部分的逼近能力,进一步提高跟踪精度;通过估计执行器故障参数的边界,所提出的弹性控制方案可以解决无限多个执行器故障问题,保证即使执行器发生故障,水面无人艇仍能精确地跟踪参考轨迹。
57、3)结合自触发控制机制,设计基于学习预设性能弹性轨迹跟踪控制器,解决了传统时间触发控制方法中存在的通信负担问题,避免了事件触发控制方法中对触发条件的连续监控行为,降低控制信号的更新频率以及执行器的机械磨损,实现了控制信号自适应性的间断性更新,同时拥有良好的跟踪性能。
58、为使本发明的上述目的、特征和优点能更明显易懂,下文特举本发明实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!