电子负载控制方法、系统、存储介质及电子负载与流程
本发明涉及电子负载领域,尤其是涉及一种电子负载控制方法、系统、存储介质及电子负载。
背景技术:
1、在电子负载中,恒流模式是其中最重要的一个功能,而此模式下,开启的响应速度、电流额定值大小、电流的精度都是电子负载的重要指标。电子负载是一种利用mosfet的线性区当作可变电阻来消耗电能的设备。mosfet在恒流区(放大状态)内,栅极-源极电压vgs一定时,电流id不随漏极-源极电压vds的变化而变化,可实现mos管输出回路电流恒定,只要改变vgs的值,即可在改变输出回路中恒定的电流的大小。在正常使用电子负载,会通过向mosfet输出一个导通量控制电压,然后mosfet便会在经过一段响应时间之后,输出电流并进入线性放大区域,开始工作,而从开始输出导通量控制电压到出现输出电流的时间便被定义为响应时间;但是,采用前述方法控制时,响应时间会需要几百微秒或毫秒级别以上,在一定程度上影响了对电子负载的高效控制,因此,如何能够将响应时间进行有效的降低,就成了目前亟需解决的问题。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种电子负载控制方法,能够解决当前电子负载的响应时间过长的问题。
2、本发明还提出了一种系统、存储介质和电子负载。
3、根据本发明的第一方面实施例的电子负载控制方法,所述电子负载包括多个mosfet,所述电子负载控制方法包括:
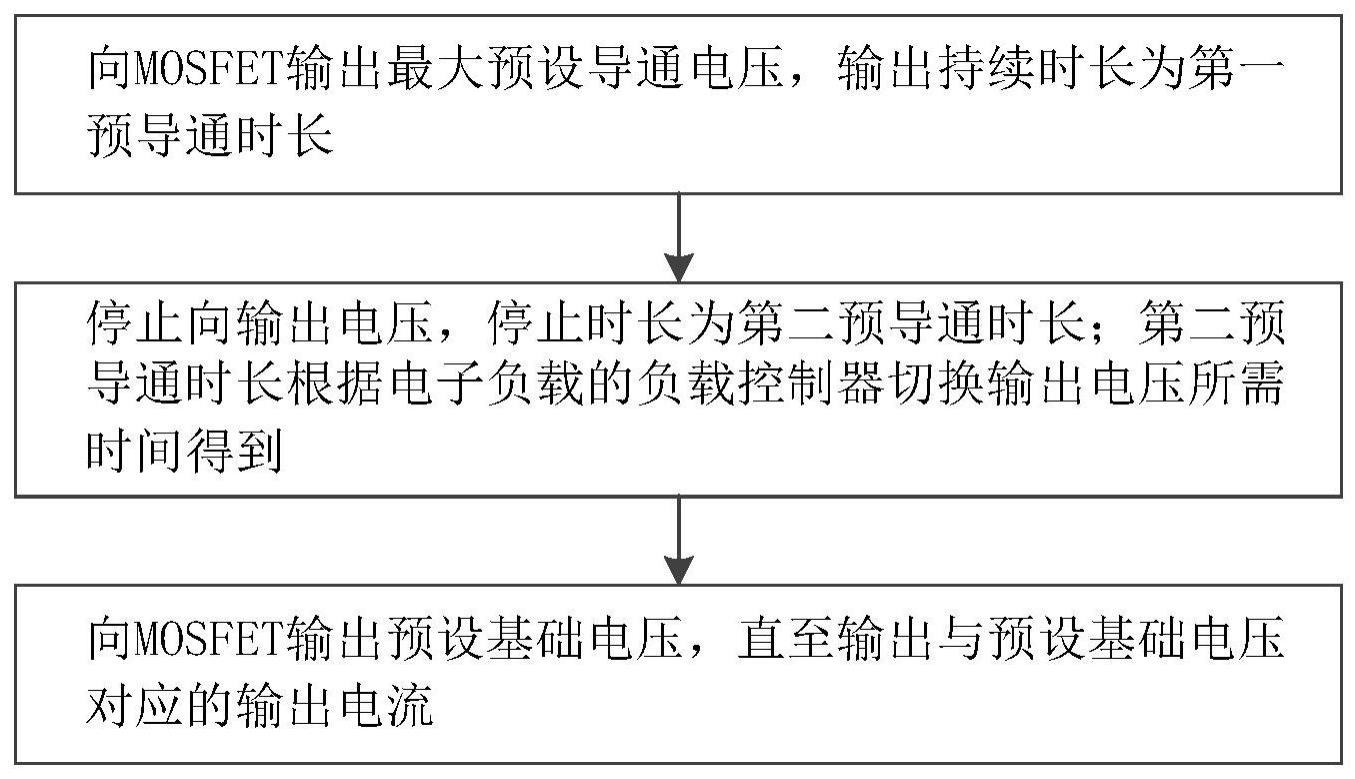
4、向所述mosfet输出最大预设导通电压,输出持续时长为第一预导通时长;
5、停止向所述mosfet输出电压,停止时长为第二预导通时长;所述第二预导通时长根据所述电子负载的负载控制器切换输出电压所需时间得到;
6、向所述mosfet输出预设基础电压,直至所述mosfet输出与所述预设基础电压对应的输出电流;
7、其中,所述第一预导通时长由以下步骤得到:
8、向所述mosfet输出所述最大预设导通电压,并获取所述mosfet的输出电流的电流波形;
9、确定所述电流波形中的电流输出起点;
10、根据开始输出所述最大预设导通电压的对应时刻至所述电流输出起点出现的对应时刻的时长确定所述第一预导通时长。
11、根据本发明实施例的电子负载控制方法,至少具有如下有益效果:
12、本发明实施例的电子负载控制方法先利用最大预设导通电压对mosfet进行预导通,从而可以极大的缩短mosfet的响应时间,同时,在最大预设导通电压加压完成后,停止向mosfet加压第二预导通时长,使得mosfet的电流一定从零开始,最终可以使得预设基础电压加压时,mosfet的上升电流的斜率仍然能够与预期的一致。本发明实施例的电子负载控制方法利用预导通的思想,不但直接有效的缩短了mosfet的响应时间,还保证了输出电流的上升斜率不变,足以满足市场需求,适合进行产业化推广。
13、根据本发明的一些实施例,所述根据开始输出所述最大预设导通电压的对应时刻至所述电流输出起点出现的对应时刻的时长确定所述第一预导通时长,包括:
14、将开始输出所述最大预设导通电压的对应时刻至所述电流输出起点出现的对应时刻的时长确定为最大预导通时长;
15、根据所述最大预导通时长和防尖峰预设时间阈值得到所述第一预导通时长。
16、根据本发明的一些实施例,所述第一预导通时长由下公式得到:
17、t1=t1max-n;
18、式中,t1为第一预导通时长,t1max为最大预导通时长,n为防尖峰预设时间阈值。
19、根据本发明的一些实施例,所述防尖峰预设时间阈值为所述负载控制器的2个da控制周期。
20、根据本发明的一些实施例,所述第二预导通时长为所述负载控制器的2个da控制周期。
21、根据本发明的一些实施例,所述电子负载包括多个恒流闭环控制电路,多个所述恒流闭环控制电路与多个所述mosfet一一对应设置,每个所述恒流闭环控制电路皆具有导通电压输入端、反馈输出端、电流采样端,所述电流采样端用于采集对应所述mosfet的输出电流,所述导通电压输入端用于接收所述最大预设导通电压和所述预设基础电压,所述反馈输出端与对应的所述mosfet的栅极连接,所述恒流闭环控制电路用于根据所述导通电压输入端输入的电压和所述电流采样端采集的电流调整所述反馈输出端的输出状态。
22、根据本发明的一些实施例,所述恒流闭环控制电路,包括:
23、采样电阻,其一端与所述mosfet的源极连接,另一端与地线连接;
24、差分放大器,其正输入端与所述采样电阻的一端连接,负输入端与所述采样电阻的另一端连接;
25、误差放大器,其正输入端用于接收所述最大预设导通电压和所述预设基础电压,负输入端与所述差分放大器的输出端连接,输出端与所述mosfet的栅极连接;所述mosfet的漏极用于连接工作电压;
26、第一分压电阻,其一端与所述mosfet的漏极连接,另一端与所述mosfet的栅极连接;
27、第二分压电阻,其一端与所述mosfet的栅极连接,另一端与地线连接。
28、根据本发明的第二方面实施例的电子负载控制系统,所述电子负载包括多个mosfet,所述电子负载控制系统包括:
29、预导通电压输出单元,用于向所述mosfet输出最大预设导通电压,输出持续时长为第一预导通时长;
30、中止单元,用于停止向所述mosfet输出电压,停止时长为第二预导通时长;所述第二预导通时长根据所述电子负载的负载控制器切换输出电压所需时间得到;
31、基础电压输出单元,用于向所述mosfet输出预设基础电压,直至所述mosfet输出与所述预设基础电压对应的输出电流;
32、其中,所述第一预导通时长由以下步骤得到:
33、向所述mosfet输出所述最大预设导通电压,并获取所述mosfet的输出电流的电流波形;
34、确定所述电流波形中的电流输出起点;
35、根据开始输出所述最大预设导通电压的对应时刻至所述电流输出起点出现的对应时刻的时长确定所述第一预导通时长。
36、根据本发明实施例的模数转换系统,至少具有如下有益效果:
37、本发明实施例的电子负载控制系统先利用最大预设导通电压对mosfet进行预导通,从而可以极大的缩短mosfet的响应时间,同时,在最大预设导通电压加压完成后,停止向mosfet加压第二预导通时长,使得mosfet的电流一定从零开始,最终可以使得预设基础电压加压时,mosfet的上升电流的斜率仍然能够与预期的一致。本发明实施例的电子负载控制系统利用预导通的思想,不但直接有效的缩短了mosfet的响应时间,还保证了输出电流的上升斜率不变,足以满足市场需求,适合进行产业化推广。
38、根据本发明的第三方面实施例的电子负载,包括多个mosfet和负载控制器,多个所述mosfet皆受所述负载控制器控制,所述负载控制器用于执行如上述的电子负载控制方法。
39、由于电子负载采用了上述实施例的电子负载控制方法的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果。
40、根据本发明的第四方面实施例的计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行如上述第一方面实施例所述的电子负载控制系统方法。由于计算机可读存储介质采用了上述实施例的电子负载控制系统方法的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果。
41、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
- 还没有人留言评论。精彩留言会获得点赞!