AGV门架前后移动速度控制系统及方法与流程
本发明属于工业运输导引车,尤其涉及一种agv门架前后移动速度控制系统及方法。
背景技术:
1、当前agv(automatic guided vehicle)自动导引运输车主要应用于物料自动化转运中,在无人工干预的情况下实现货物的搬运和堆垛。前移式agv在进行取放货作业时,若门架前后移动速度过慢,则运输等待时间增加,物流运输效率降低;若门架前后移动速度过快,则货物具有较大的惯性力,容易发生倾翻,造成货物散落损坏或者伤人事件。因此必须严格控制门架前后移动的速度。当门架即将到达前移极限位置或后移极限位置时,通过缓慢的减速来预期停止运动,既保证物流运输效率,又防止货物因门架移动速度过快而倾倒。
2、现有的技术方案存在以下问题:
3、1、现有的解决方案主要是在门架上加装拉线编码器,通过拉线编码器反馈的脉冲数计算门架的移动位置,进而控制门架的移动速度。该方案不仅系统结构复杂,而且硬件成本高昂。
4、2、cn202221680224.8(一种agv门架移动减速装置)提出在门架上安装传感器,通过检测传感器的信号,对门架的移动速度进行减速。该方案硬件成本低,但是感应器固定在门架上,随着门架长期往复移动,容易造成线路机械损失,并且对于电路布局存在较高要求,不利于安装和维护。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种agv门架前后移动速度控制系统、方法、存储介质及电子设备,以解决现有agv行驶过程中因门架移动速度过快而导致货物倾倒的问题。
2、本发明解决上述技术问题的技术方案如下:
3、第一方面,本发明实施例提供了一种agv门架前后移动速度控制系统,包括:支腿槽钢、油泵电机、油泵电机控制器,所述支腿槽钢用以承载agv门架的滚轮沿支腿槽钢进行前后往复运动,所述油泵电机包括油泵电机控制器,所述油泵电机用于调整agv门架移动速度,所述油泵电机控制器用以输出油泵电机转速;还包括:接近开关、感应块、车辆控制单元;所述接近开关连接所述车辆控制单元,所述车辆控制单元连接所述油泵电机控制器;
4、所述接近开关固定于所述支腿槽钢上,用于在agv门架位置接近时输出开关量信号;所述感应块固定于agv门架上,用于当所述接近开关与所述感应块的距离小于感应距离时,使所述接近开关产生开关量信号;
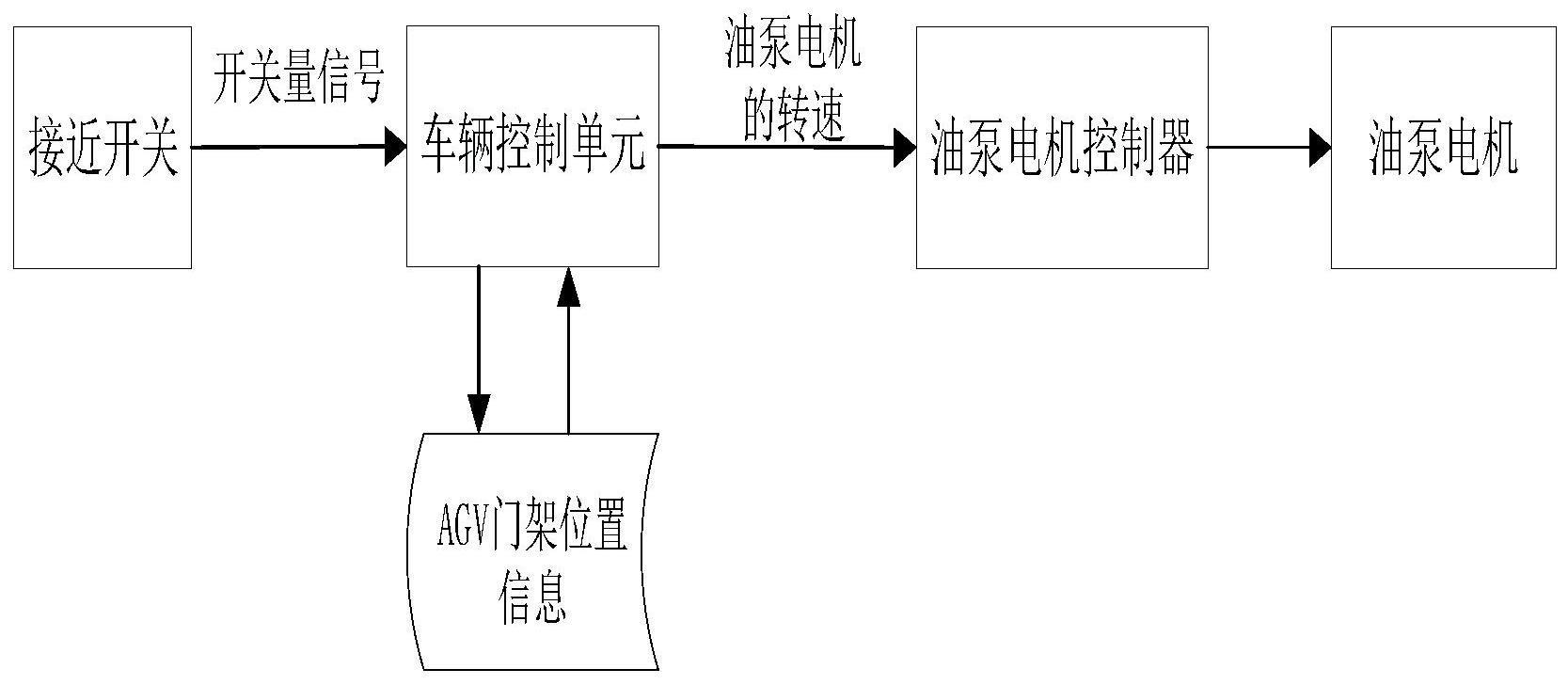
5、所述车辆控制单元用以接收接近开关输出的开关量信号,并将所述开关量信号转换为agv门架位置信息,并根据所述agv门架位置信息得到对应的油泵电机转速,所述油泵电机以所述对应的油泵电机转速控制agv门架移动速度。
6、可选地,所述接近开关包括第一接近开关、第二接近开关;所述第一接近开关固定于第一位置后,所述第二接近开关固定于第五位置前,所述第一位置为agv门架前移极限位置,所述第五位置为agv门架后移极限位置。
7、可选地,所述第一接近开关固定于第一位置后,所述第二接近开关固定于第五位置前,具体为:
8、所述第一接近开关固定于第一位置后第一距离阈值处,所述第二接近开关固定于第五位置前第二距离阈值处。
9、可选地,所述感应块的长度为4~8厘米。
10、第二方面,本申请实施例提供了一种agv门架前后移动速度控制方法,采用所述的agv门架前后移动速度控制系统实现,包括:
11、检测接近开关的开关量信号;
12、将所述开关量信号转换为agv门架位置信息;
13、根据所述agv门架位置信息设定油泵电机转速;
14、根据所述油泵电机转速调节agv门架移动速度。
15、可选地,所述将所述开关量信号转换为agv门架位置信息的过程具体为:当所述开关量信号每变化一次时,所述agv门架位置信息变化一次。
16、可选地,所述agv门架位置信息,具体为:
17、门架后移时,所述agv门架位置信息顺序变化为第一位置信息,第二位置信息、第三位置信息、第四位置信息、第五位置信息,对应油泵电机转速分别为0、第一转速、第二转速、第三转速、0;
18、门架前移时,所述agv门架位置信息顺序变化为第五位置信息,第六位置信息、第七位置信息、第八位置信息、第一位置信息,对应油泵电机转速分别为0、第四转速、第五转速、第六转速、0;
19、所述第三转速小于所述第二转速,所述第六转速小于所述第五转速。
20、可选地,所述接近开关的开关量信号被触发产生时,控制器内部信号为true;所述接近开关的开关量信号未触发产生时,控制器内部信号为false。
21、第三方面,本申请实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现任一项agv门架前后移动速度控制方法的步骤。
22、第四方面,本申请实施例提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现任一项agv门架前后移动速度控制方法的步骤。
23、本申请实施例带来了以下有益效果:
24、1、在支腿槽钢上水平安装接近开关,门架立板上固定感应块,vcu(vehiclecontrol unit,车辆控制单元)通过采集接近开关的开关量信号判断门架的位置区间,根据其内存的程序和数据进行运算、判断、处理,然后向油泵电机发送转速指令并控制电磁阀的开度,实现门架前后移动到位缓冲,减小门架前后移动的到位冲击;
25、2、该门架速度缓冲系统,硬件成本低廉、结构简单、占用空间小、经济适用,能够适应在各种前移式agv车型上;
26、3、相较于cn202221680224.8(一种agv门架移动减速装置),本申请提出的控制方法调控效果更好,将门架的移动位置细分为8个区间,实现门架的稳定移动及加速、减速的控制,门架加减速时顿挫感更轻,移动时更加平顺。
27、本申请的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
28、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
29、本发明附加的方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明实践了解到。
技术特征:
1.一种agv门架前后移动速度控制系统,包括支腿槽钢、油泵电机、油泵电机控制器,所述支腿槽钢用以承载agv门架的滚轮沿支腿槽钢进行前后往复运动,所述油泵电机用于调整agv门架移动速度,所述油泵电机控制器用以输出油泵电机转速;其特征在于,还包括:接近开关、感应块、车辆控制单元;所述接近开关连接所述车辆控制单元,所述车辆控制单元连接所述油泵电机控制器;所述接近开关固定于所述支腿槽钢上,用于在agv门架位置接近时输出开关量信号;所述感应块固定于agv门架上,用于当所述接近开关与所述感应块的距离小于感应距离时,使所述接近开关产生开关量信号;
2.根据权利要求1所述的agv门架前后移动速度控制系统,其特征在于,所述接近开关包括第一接近开关、第二接近开关;所述第一接近开关固定于第一位置后,所述第二接近开关固定于第五位置前,所述第一位置为agv门架前移极限位置,所述第五位置为agv门架后移极限位置。
3.根据权利要求2所述的agv门架前后移动速度控制系统,其特征在于,所述第一接近开关固定于第一位置后,所述第二接近开关固定于第五位置前,具体为:
4.根据权利要求1~3中任一项所述的agv门架前后移动速度控制系统,其特征在于,所述感应块的长度为4~8厘米。
5.一种agv门架前后移动速度控制方法,采用权利要求1~4中任一项所述的agv门架前后移动速度控制系统实现,其特征在于,包括:
6.根据权利要求5所述的agv门架前后移动速度控制方法,其特征在于,所述将所述开关量信号转换为agv门架位置信息的过程具体为:当所述开关量信号每变化一次时,所述agv门架位置信息变化一次。
7.根据权利要求6所述的agv门架前后移动速度控制方法,其特征在于,所述agv门架位置信息,具体为:
8.根据权利要求5~7中任一项所述的agv门架前后移动速度控制方法,其特征在于,所述接近开关的开关量信号被触发产生时,控制器内部信号为true;所述接近开关的开关量信号未触发产生时,控制器内部信号为false。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求5~8中任一项所述的agv门架前后移动速度控制方法的步骤。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求5~8中任一项所述的agv门架前后移动速度控制方法的步骤。
技术总结
本发明提出了一种AGV门架前后移动速度控制系统、方法、存储介质及电子设备,涉及工业运输导引车领域,其中系统包括:接近开关、感应块、车辆控制单元;接近开关连接车辆控制单元,车辆控制单元连接油泵电机控制器;接近开关固定于支腿槽钢上,用于在AGV门架位置接近时输出开关量信号;感应块固定于AGV门架上,用于当接近开关与感应块的距离小于感应距离时,使接近开关产生开关量信号;车辆控制单元用以接收开关量信号并使之转换为AGV门架位置信息,进而得到对应设定的油泵电机转速,油泵电机以该油泵电机转速控制AGV门架移动速度。本发明在保证物流运输效率基础上,相比现有技术低成本解决了货物因门架移动速度过快而倾倒的问题。
技术研发人员:汪伟,潘显成,彭钰杰,张曦,常亮,丁绍广
受保护的技术使用者:安徽合力股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!