一种无人机编队飞行的队形切换控制系统的制作方法
本发明涉及无人机编队领域,特别是涉及一种无人机编队飞行的队形切换控制系统。
背景技术:
1、无人机编队是指多架无人机为适应任务需求而进行的某种队形排列和任务分配。这个概念既包括了无人机编队飞行时的队形产生、保持和变化,也涵盖了飞行任务的规划、组织与执行。无人机编队是无人机技术发展的一个重要趋势,拥有无比广阔的发展和应用前景,由于单架无人机所搭载的设备,航程和活动区域都极为有限,所以要完成比较复杂的任务时,就必须出动多个架次的无人机。而编队作业的无人机则可以弥补这一缺陷,多架无人机可以分散搭载设备,将复杂的任务拆分为若干个相对简单的任务,分配给编队中的不同无人机分别执行,使该项任务能够一次完成,从而显著地提高任务效率。
2、编队控制问题作为无人机领域一项关键技术和研究热点,国外的专家和学者已经开展了大量的研究工作,并且有许多显著的研究成果,主要有传统的跟随领航者方法、虚拟领航者结构、行为控制方法,以及近几年受到青睐的基于一致性理论的分布式编队控制方法。
3、对领航-跟随者方法的研究中,虽然控制简单,每个无人机只需要跟随领航者的位置即可,很大程度地减少了每个无人机的计算量;但是领航者没有跟随者的位置误差反馈,领航者运动过快可能导致跟随者掉队,链式领航跟随者策略存在位置误差的传递迭代,越后面的跟随者的位置误差越大,领航者发生故障,会导致整个编队失效。
4、在虚拟结构方法中,每个无人机跟踪的是同一个虚拟固定点,因此不存在链式领航跟随者策略中的位置误差传递迭代问题,同时可以避免领航-跟随者策略中的领航者发生故障,而可能导致整个编队失效的问题;然而,合成虚拟领航者的位置并将其传输给每个无人机的过程中,需要复杂的计算和大量的通信,由于虚拟领航者的位置固定不变,整个编队的避障能力较差。
5、在基于行为的方法中,通信量较少,对环境变化响应速度快,当同时有多个相互冲突的行为目标时,可以很容易地得到控制输出,同时有队形的反馈。然而,编队的整体行为是隐现出来的,难以进行明确的定义,无法对基本行为进行准确的数学描述,队形的稳定性不能保证。
6、基于分布式的协同编队控制中,无人机个体只需要与其近临的无人机之间进行信息交换,便可以形成期望的编队结构,并且实现整个无人机系统的速度、航迹方位角、航迹倾斜角等状态量的统一;这种通过局部信息交换的分布式控制策略,以其短距离通讯的优势确保整个编队系统稳定的前提下,降低了计算的复杂度,大大减少了信息传递所带来的能量消耗;在这种无集中协调的方式下,可以实现大规模、分布式的编队控制与协调,具有较好的灵活性和适应性,能够有效的实现整个编队的避撞,同时,也不会因为少量成员的退出或者损伤而降低多无人机系统的鲁棒性。
7、以上所述的编队控制方法都需要无人机的控制系统在控制周期内不断修正飞行参数使其进行编队保持、切换与重构,在工程上实现有较大困难,因此如何设计一种无人机编队飞行的队形切换控制系统具有相当重要的理论和现实意义,能够在使用途中增添使用效率。
技术实现思路
1、为了克服上述现有技术的结构缺陷,本发明提供一种无人机编队飞行的队形切换控制系统。
2、为解决上述技术问题,本发明提供如下技术方案:一种无人机编队飞行的队形切换控制系统,其特征在于步骤如下:
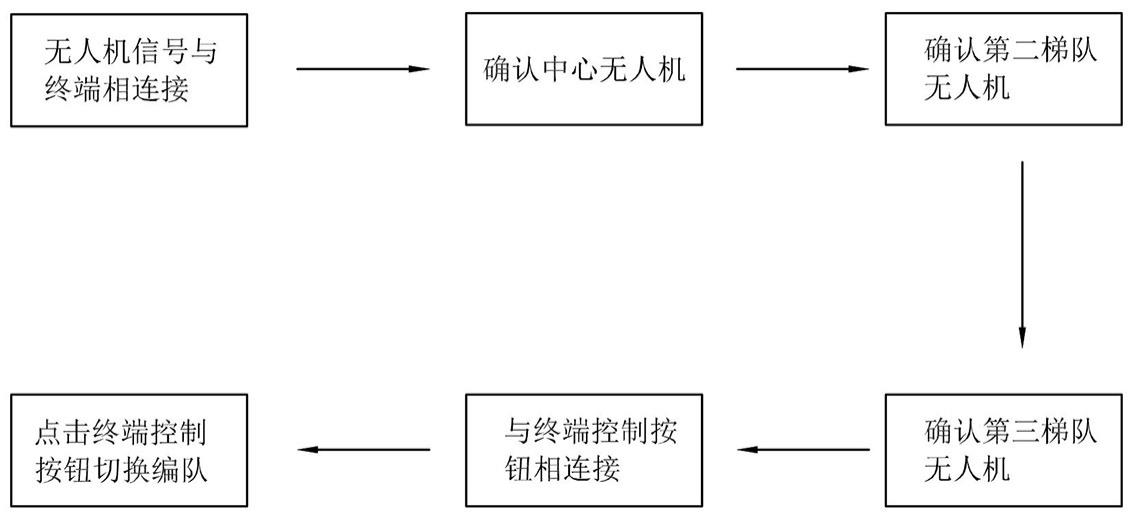
3、步骤1:将无人机信号与终端机信号相电性连接;
4、步骤2:确认中心点无人机,在编程时候将中心无人机设为1,从而以中心点无人机为中心,使四周无人机与中心点无人机进行位置感应;
5、步骤3:确认二梯队无人机,在编程时将与中心点无人机相邻的多个无人机设为2;
6、步骤4:确认第三梯队无人机,在编程时将与二梯队无人机相邻的多个无人机设为3;
7、步骤5:通过终端机编程确认每组不同的队形按键,从而方便在使用时能够一键切换队形;
8、步骤6:之后在使用时通过不同的按键,从而一键控制无人机阵列的形成。
9、优选的,一种无人机编队飞行的队形切换控制系统的设备,包括无人机主体,所述无人机主体内部固定安装有第一蓄电池,所述第一蓄电池位于无人机主体内部中心处与无人机主体共用同一个中心点,所述第一蓄电池上基面设有第一控制信号接收器,所述第一控制信号接收器位于无人机主体内部,所述第一控制信号接收器与无人机主体共用同一个中心点,所述第一控制信号接收器与第一蓄电池相电性连接。
10、优选的,所述无人机主体内部设有多组位置感应器,所述位置感应器分别位于无人机主体内部四边处,相对的两个所述位置感应器平行且位于同一平面,相对的两个所述位置感应器与第一蓄电池之间的距离相互平等,所述位置感应器与第一控制信号接收器相电性连接。
11、优选的,所述无人机主体外部设有多组支撑组件,所述支撑组件固定安装于无人机主体上基面四角处,所述支撑组件包括有连接块和支撑杆,所述连接块固定与无人机主体相连接,所述支撑杆固定与连接块相连接,多组所述支撑杆分别与无人机主体四角处相平行。
12、优选的,所述支撑杆远离无人机主体一端设有驱动组件,所述驱动组件包括有电机和传动杆,所述电机位于支撑杆的上基面,所述电机输出端传动连接有传动杆,所述传动杆贯通支撑杆传动连接有转浆。
13、优选的,所述转浆两端分别铰链有辅助转浆组件,所述辅助转浆组件包括有连接杆和辅助转浆,所述连接杆固定与转浆两端上基面相固定连接,多组所述连接杆距离转浆中心点位置相等,所述连接杆之间相互平行且位于同一平面,所述连接杆上基面铰链有辅助转浆。
14、优选的,一种无人机编队飞行的队形切换控制系统的设备控制器,包括控制器主体,所述控制器主体两端面分别固定安装有握柄,所述握柄之间相互平行且位于同一平面,所述控制器主体内部设有第二控制信号接收器、第二蓄电池和电路板,所述第二控制信号接收器信号连接有多组第一控制信号接收器。
15、优选的,所述第二蓄电池电性连接有第二控制信号接收器和电路板,所述第二蓄电池位于第二控制信号接收器和电路板之间。
16、优选的,所述控制器主体上基面设有触摸显示屏和多组控制开关,所述触摸显示屏电性连接有第二控制信号接收器和第二蓄电池。
17、优选的,所述控制开关等距安装于控制器主体上基面,所述控制开关电性连接有电路板和第二控制信号接收器。
18、与现有技术相比,本发明能达到的有益效果是:本发明通过上述步骤的运行,能够的将从无人机的编队飞行队形实现准确的切换,并且在无人机队形切换时能够实现一键控制来实现上述操作,保证了无人机队形切换的快捷。
技术特征:
1.一种无人机编队飞行的队形切换控制系统,其特征在于步骤如下:
2.一种无人机编队飞行的队形切换控制系统的设备,包括无人机主体(1),其特征在于:所述无人机主体(1)内部固定安装有第一蓄电池(2),所述第一蓄电池(2)位于无人机主体(1)内部中心处与无人机主体(1)共用同一个中心点,所述第一蓄电池(2)上基面设有第一控制信号接收器(3),所述第一控制信号接收器(3)位于无人机主体(1)内部,所述第一控制信号接收器(3)与无人机主体(1)共用同一个中心点,所述第一控制信号接收器(3)与第一蓄电池(2)相电性连接。
3.根据权利要求2所述的一种无人机编队飞行的队形切换控制系统的设备,其特征在于:所述无人机主体(1)内部设有多组位置感应器(4),所述位置感应器(4)分别位于无人机主体(1)内部四边处,相对的两个所述位置感应器(4)平行且位于同一平面,相对的两个所述位置感应器(4)与第一蓄电池(2)之间的距离相互平等,所述位置感应器(4)与第一控制信号接收器(3)相电性连接。
4.根据权利要求2所述的一种无人机编队飞行的队形切换控制系统的设备,其特征在于:所述无人机主体(1)外部设有多组支撑组件,所述支撑组件固定安装于无人机主体(1)上基面四角处,所述支撑组件包括有连接块(5)和支撑杆(6),所述连接块(5)固定与无人机主体(1)相连接,所述支撑杆(6)固定与连接块(5)相连接,多组所述支撑杆(6)分别与无人机主体(1)四角处相平行。
5.根据权利要求4所述的一种无人机编队飞行的队形切换控制系统的设备,其特征在于:所述支撑杆(6)远离无人机主体(1)一端设有驱动组件,所述驱动组件包括有电机(7)和传动杆(8),所述电机(7)位于支撑杆(6)的上基面,所述电机(7)输出端传动连接有传动杆(8),所述传动杆(8)贯通支撑杆(6)传动连接有转浆(9)。
6.根据权利要求5所述的一种无人机编队飞行的队形切换控制系统的设备,其特征在于:所述转浆(9)两端分别铰链有辅助转浆组件,所述辅助转浆组件包括有连接杆(10)和辅助转浆(11),所述连接杆(10)固定与转浆(9)两端上基面相固定连接,多组所述连接杆(10)距离转浆(9)中心点位置相等,所述连接杆(10)之间相互平行且位于同一平面,所述连接杆(10)上基面铰链有辅助转浆(11)。
7.一种无人机编队飞行的队形切换控制系统的设备控制器,包括控制器主体(12),其特征在于:所述控制器主体(12)两端面分别固定安装有握柄(13),所述握柄(13)之间相互平行且位于同一平面,所述控制器主体(12)内部设有第二控制信号接收器(14)、第二蓄电池(15)和电路板(16),所述第二控制信号接收器(14)信号连接有多组第一控制信号接收器(3)。
8.根据权利要求7所述的一种无人机编队飞行的队形切换控制系统的设备控制器,其特征在于:所述第二蓄电池(15)电性连接有第二控制信号接收器(14)和电路板(16),所述第二蓄电池(15)于第二控制信号接收器(14)和电路板(16)之间。
9.根据权利要求7所述的一种无人机编队飞行的队形切换控制系统的设备控制器,其特征在于:所述控制器主体(12)上基面设有触摸显示屏(17)和多组控制开关(18),所述触摸显示屏(17)电性连接有第二控制信号接收器(14)和第二蓄电池(15)。
10.根据权利要求9所述的一种无人机编队飞行的队形切换控制系统的设备控制器,其特征在于:所述控制开关(18)等距安装于控制器主体(12)上基面,所述控制开关(18)电性连接有电路板(16)和第二控制信号接收器(14)。
技术总结
本发明公开了一种无人机编队飞行的队形切换控制系统,包括无人机主体,第一控制信号接收器位于无人机主体内部,第一控制信号接收器与无人机主体共用同一个中心点,第一控制信号接收器与第一蓄电池相电性连接。其运行步骤包括:将无人机信号与终端机信号相电性连接;确认中心点无人机,在编程时候将中心无人机设有1,从而以中心点无人机为中心,使四周无人机与中心点无人机进行位置感应;确认二梯队无人机,在编程时将与中心点无人机相邻的多个无人机设为2;确认第三梯队无人机,在编程时将与二梯队无人机相邻的多个无人机设为3;通过终端机编程确认每组不同的队形按键,从而方便在使用时能够一键切换队形。
技术研发人员:赵红富,李洁,林瑜
受保护的技术使用者:山东首景辉光电科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!