智能划线方法及智能划线机器人
本发明涉及道路检测,尤其涉及一种智能划线方法及智能划线机器人。
背景技术:
1、随着城镇化进程的不断加快,公路交通的蓬勃发展,建成了大量的高速公路及城乡道路,伴随而来的是巨大的道路标线绘制及其定期维护工作,需要投入大量的人力物力。
2、现有的道路标线划线过程中,一般是采用人工推动划线车的方式进行划线,工作条件艰苦、效率低且容易出现划线偏差过大的现象,降低了划线的准确性。
技术实现思路
1、本发明实施例的目的在于提供一种智能划线方法及智能划线机器人,旨在解决现有的路标划线准确性低下、人工劳动强度大的问题。
2、本发明实施例是这样实现的,一种智能划线方法,所述方法包括:
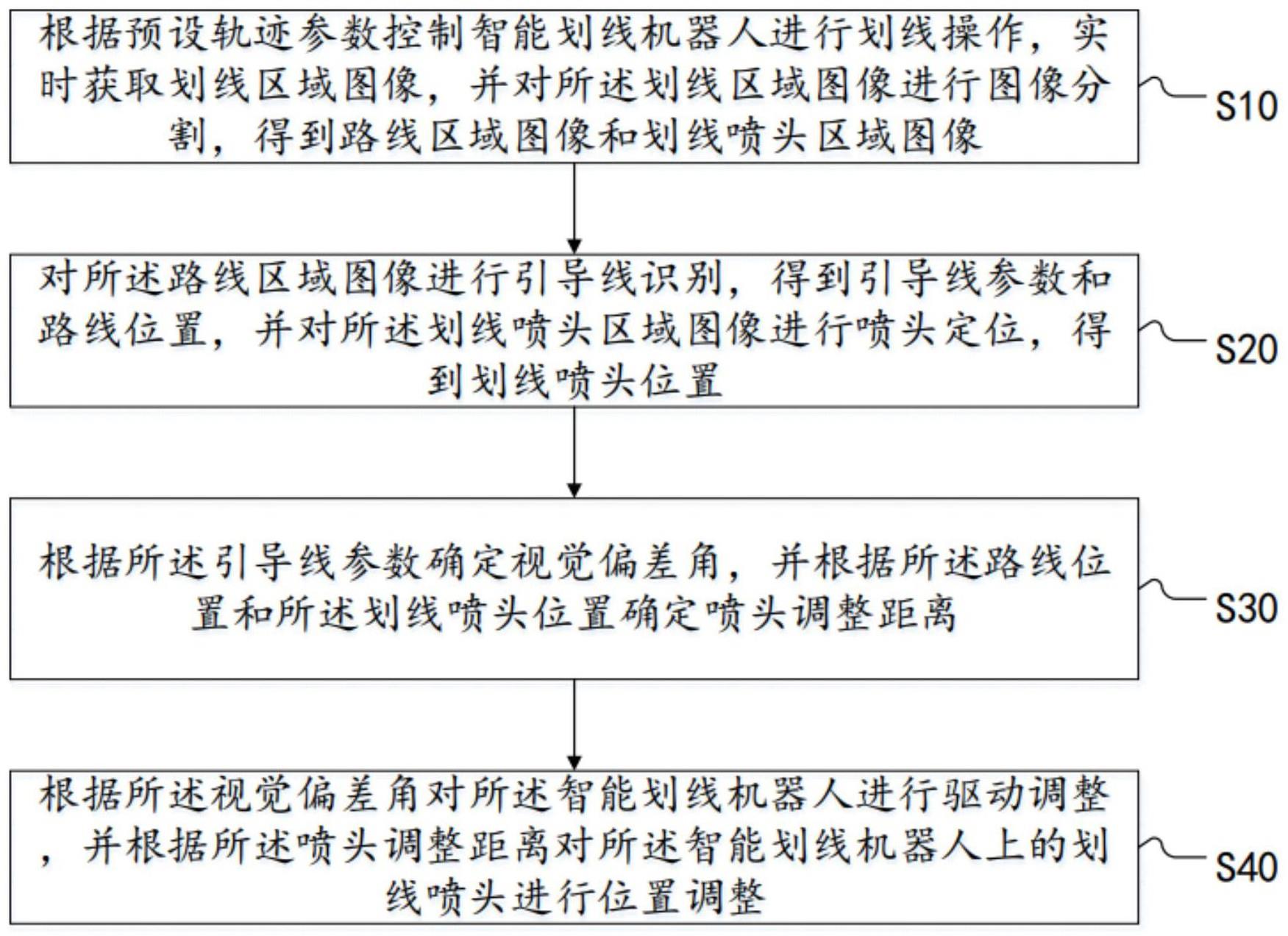
3、根据预设轨迹参数控制智能划线机器人进行划线操作,实时获取划线区域图像,并对所述划线区域图像进行图像分割,得到路线区域图像和划线喷头区域图像;
4、对所述路线区域图像进行引导线识别,得到引导线参数和路线位置,并对所述划线喷头区域图像进行喷头定位,得到划线喷头位置;
5、根据所述引导线参数确定视觉偏差角,并根据所述路线位置和所述划线喷头位置确定喷头调整距离;
6、根据所述视觉偏差角对所述智能划线机器人进行驱动调整,并根据所述喷头调整距离对所述智能划线机器人上的划线喷头进行位置调整。
7、优选的,所述对所述路线区域图像进行引导线识别,包括:
8、对所述路线区域图像进行高斯滤波处理,得到路线滤波图像,并对所述路线滤波图像进行边缘检测,得到边缘图像;
9、对所述边缘图像进行霍夫变换,得到引导特征线,并分别计算各引导特征线的倾斜角;
10、根据所述倾斜角对各引导特征线进行分类,得到划线引导线,并分别获取各划线引导线的参数信息和位置信息,得到所述引导线参数和所述路线位置。
11、优选的,所述根据所述倾斜角对各引导特征线进行分类,包括:
12、当θ0+δ≥π/2,且θ0-δ≤θi≤π/2或-π/2≤θi≤θ0+δ-π,则判定θi与θ0为同一条曲线,否则判定θi与θ0不是同一条曲线;
13、当θ0-δ≤-π/2时,且-π/2≤θi≤θ0+δ或π+θ0-δ≤θi≤π/2,则判定θi与θ0为同一条曲线,否则判定θi与θ0不是同一条曲线;
14、当-π/2+δ≤θ0≤π/2-δ时,且|θi-θ0|≤δ,则判定θi与θ0为同一条曲线,否则判定θi与θ0不是同一条曲线;
15、其中,θ0为首个所述引导特征线的倾斜角,θi为第i+1个所述引导特征线的倾斜角,δ是预设角度误差;
16、若θi与θ0为同一曲线,则将θi和θ0对应的引导特征线存储至第一引导线集合;
17、若θi与θ0不为同一曲线,则将θi对应的引导特征线存储至第二引导线集合;
18、根据所述第一引导线集合和所述第二引导线集合确定生成所述划线引导线。
19、优选的,所述根据所述引导线参数确定视觉偏差角,包括:
20、分别获取各划线引导线的中心点,得到图像轨迹线特征点,并根据所述路线区域图像的像素值确定偏差点;
21、计算所述图像轨迹线特征点与所述偏差点之间的连线,与所述路线区域图像中图像垂直中心线的夹角,得到所述视觉偏差角。
22、优选的,所述根据所述路线位置和所述划线喷头位置确定喷头调整距离采用的公式包括:
23、ep=k1(xz-xt)
24、其中,ep是所述喷头调整距离,xz是所述划线喷头位置中的横坐标,xt是所述路线位置中图像轨迹线特征点的横坐标,k1是第一比例系数。
25、优选的,所述根据所述视觉偏差角对所述智能划线机器人进行驱动调整采用的公式包括:
26、vr=(k2γ+1)vl
27、其中,vl是所述智能划线机器人上左侧主动轮的控制速度,vr是所述智能划线机器人上右侧主动轮的控制速度,k2是第二比例系数,γ是所述视觉偏差角。
28、优选的,所述方法还包括:
29、若检测到同一所述划线区域图像中存在交叉的所述划线引导线,则获取交叉的所述划线引导线之间的引导线交点,并根据所述引导线交点的编号查询运动四元组数据;
30、根据所述运动四元组数据中的旋转角度和前进距离控制所述智能划线机器人进行位姿调整,并根据所述运动四元组数据中的划线标识控制所述划线喷头进行开关状态的切换。
31、优选的,所述对所述划线喷头区域图像进行喷头定位,包括:
32、对所述划线喷头区域图像进行颜色识别,并将颜色识别结果中预设颜色对应的区域位置确定为所述划线喷头位置。
33、本发明实施例的另一目的在于提供一种智能划线机器人,包括:
34、车体、设于所述车体侧边的驱动装置和与所述车体连接的划线装置,所述车体内设置有控制单元,所述划线装置包括直线导轨、与所述直线导轨连接的步进电机、设于所述直线导轨上的导轨滑台和设于所述导轨滑台上的划线喷头;
35、所述控制单元用于,根据预设轨迹参数分别控制所述驱动装置和所述划线喷头执行驱动操作和划线操作;
36、实时获取划线区域图像,并对所述划线区域图像进行图像分割,得到路线区域图像和划线喷头区域图像;
37、对所述路线区域图像进行引导线识别,得到引导线参数和路线位置,并对所述划线喷头区域图像进行喷头定位,得到划线喷头位置;
38、根据所述引导线参数确定视觉偏差角,并根据所述路线位置和所述划线喷头位置确定喷头调整距离;
39、根据所述视觉偏差角对所述驱动装置进行驱动调整,并根据所述喷头调整距离控制所述步进电机驱动所述划线喷头进行位置调整。
40、优选的,所述直线导轨上设有左限位器和右限位器,所述导轨滑台设于所述左限位器和所述右限位器之间,所述直线导轨上还设有补光灯。
41、本发明实施例,通过对路线区域图像进行引导线识别、对划线喷头区域图像进行喷头定位,能有效地得到引导线参数、路线位置和划线喷头位置,基于引导线参数能自动确定视觉偏差角,基于路线位置和划线喷头位置能自动确定喷头调整距离,基于视觉偏差角,能自动对智能划线机器人进行驱动调整,提高了智能划线机器人划线移动的准确性,基于喷头调整距离能自动对划线喷头进行位置调整,有效地提高了喷头划线的准确性,无需采用人工的方式进行划线,提高了划线效率,且防止了采用人工划线导致的划线偏差较大的现象。
技术特征:
1.一种智能划线方法,其特征在于,所述方法包括:
2.如权利要求1所述的智能划线方法,其特征在于,所述对所述路线区域图像进行引导线识别,包括:
3.如权利要求2所述的智能划线方法,其特征在于,所述根据所述倾斜角对各引导特征线进行分类,包括:
4.如权利要求2所述的智能划线方法,其特征在于,所述根据所述引导线参数确定视觉偏差角,包括:
5.如权利要求1所述的智能划线方法,其特征在于,所述根据所述路线位置和所述划线喷头位置确定喷头调整距离采用的公式包括:
6.如权利要求1所述的智能划线方法,其特征在于,所述根据所述视觉偏差角对所述智能划线机器人进行驱动调整采用的公式包括:
7.如权利要求2至4任一所述的智能划线方法,其特征在于,所述方法还包括:
8.如权利要求1所述的智能划线方法,其特征在于,所述对所述划线喷头区域图像进行喷头定位,包括:
9.一种智能划线机器人,其特征在于,包括:
10.如权利要求9所述的智能划线机器人,其特征在于,所述直线导轨上设有左限位器和右限位器,所述导轨滑台设于所述左限位器和所述右限位器之间,所述直线导轨上还设有补光灯。
技术总结
本发明提供了一种智能划线方法及智能划线机器人,该方法包括:根据预设轨迹参数控制智能划线机器人进行划线操作,划线区域图像进行图像分割,得到路线区域图像和划线喷头区域图像;对路线区域图像进行引导线识别得到引导线参数和路线位置,对划线喷头区域图像进行喷头定位得到划线喷头位置;根据引导线参数确定视觉偏差角,根据路线位置和划线喷头位置确定喷头调整距离;根据视觉偏差角对智能划线机器人进行驱动调整,根据喷头调整距离对划线喷头进行位置调整。本发明基于视觉偏差角,能自动对智能划线机器人进行驱动调整,提高了智能划线机器人划线移动的准确性,基于喷头调整距离能自动对划线喷头进行位置调整,有效地提高了喷头划线的准确性。
技术研发人员:张永贤,杨文超,黄盛科
受保护的技术使用者:华东交通大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!