一种多轴协同运动控制方法、装置、设备及介质与流程
本技术涉及飞机装配位姿控制,尤其涉及一种多轴协同运动控制方法、装置、设备及介质。
背景技术:
1、近年来,伴随着航空制造技术水平不断提高,对飞机装配技术要求也越来越高。飞机装配是整个机身制造过程必不可少的环节,其涉及学科领域多且技术难度大。在飞机装配制造过程中,通常是将整机分成若干个装配部件,装配方式采用先部装再总装,其中飞机大部件(大尺寸、弱刚性部件)的调姿、对合是两个非常重要的工艺过程,影响着整个飞机装配过程的安全和效率。
2、大部件在调姿、对合过程中,通常利用多个三坐标数控定位器支撑定位大部件进行调姿,首先,大部件和三坐标数控定位器通过球头和球窝进行软连接;其次,通过工控计算机对各个三坐标数控定位器上x轴、y轴、z轴的运动,分别进行轨迹规划;最后,控制伺服系统协同运动,实现对大部件的调姿、对合装配,整个过程的难点在于如何维持各个三坐标数控定位器的球窝之间的刚性状态。
技术实现思路
1、本技术的主要目的在于提供一种多轴协同运动控制方法、装置、设备及介质,旨在解决现有通过多个三坐标数控定位器支撑定位大部件进行调姿的方法难以维持各个三坐标数控定位器的球窝之间的刚性状态的技术问题。
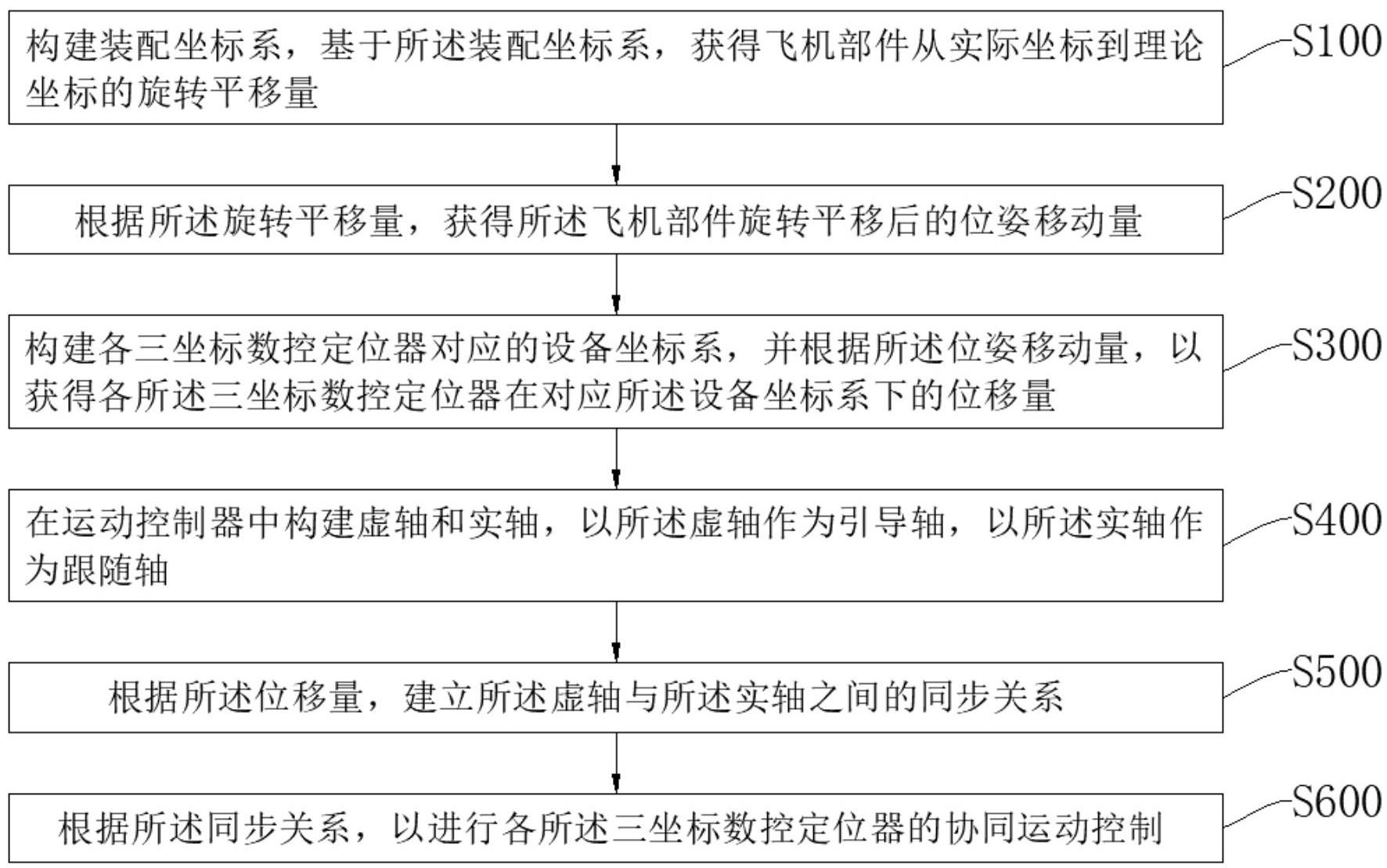
2、为实现上述目的,本技术提供一种多轴协同运动控制方法,包括以下步骤:
3、构建装配坐标系,基于所述装配坐标系,获得飞机部件从实际坐标到理论坐标的旋转平移量;
4、根据所述旋转平移量,获得所述飞机部件旋转平移后的位姿移动量;
5、构建各三坐标数控定位器对应的设备坐标系,并根据所述位姿移动量,以获得各所述三坐标数控定位器在对应所述设备坐标系下的位移量;其中,所述三坐标数控定位器上设有球窝,所述球窝用于对接所述飞机部件上的球头;
6、在运动控制器中构建虚轴和实轴,以所述虚轴作为引导轴,以所述实轴作为跟随轴;其中,所述运动控制器用于控制各所述三坐标数控定位器同步运动;
7、根据所述位移量,建立所述虚轴与所述实轴之间的同步关系;
8、根据所述同步关系,以进行各所述三坐标数控定位器的协同运动控制。
9、可选地,所述构建装配坐标系,基于所述装配坐标系,获得飞机部件从实际坐标到理论坐标的旋转平移量,包括:
10、以飞机部件的装配中心位置构建装配坐标系;
11、基于所述装配坐标系,并根据所述飞机部件的表面特征点的理论值和实测值,以获得所述飞机部件从实际坐标到理论坐标的旋转平移量,记为[x,y,z,α,β,γ];其中,x为所述飞机部件在x轴方向的平移量,y为所述飞机部件在y轴方向的平移量,z为所述飞机部件在z轴方向的平移量,α为所述飞机部件绕x轴的旋转量,β为所述飞机部件绕y轴的旋转量,γ为所述飞机部件绕z轴的旋转量。
12、可选地,所述根据所述旋转平移量,获得所述飞机部件旋转平移后的位姿移动量,包括:
13、构建所述三坐标数控定位器的坐标轴轨迹函数x(t),表达式如下:
14、
15、式中,a5、a4、a3均为系数,且a5=6/te5,a4=15/te4,a3=10/te3,te为设定的总时间常数c,xte=[0,0,0,0,0,0,],x0为所述飞机部件的初始位姿参数,t为自变量;
16、将每个所述三坐标数控定位器的坐标轴轨迹函数x(t)根据旋转平移量[x,y,z,α,β,γ]及工艺需求分解为n个插补点,则有:
17、
18、式中,t'为插补周期,c为设定的总时间常数;
19、并获得以下函数:
20、
21、式中,n为拆分后对应的各个插补点,x(x)、x(y)、x(z)、x(α)、x(β)和x(γ)即为所述飞机部件旋转平移后的位姿移动量。
22、可选地,所述构建各三坐标数控定位器对应的设备坐标系,并根据所述位姿移动量,以获得各所述三坐标数控定位器在对应所述设备坐标系下的位移量,包括:
23、构建各三坐标数控定位器对应的设备坐标系;
24、求解各所述三坐标数控定位器在所述设备坐标系下的移动量刚性变换转换关系式m,表达式如下:
25、
26、式中,αt表示在t时刻各个球窝中心点沿装配坐标系x轴旋转的角度,βt表示在t时刻各个球窝中心点沿装配坐标系y轴旋转的角度,γt表示在t时刻各个球窝中心点沿装配坐标系z轴旋转的角度;
27、对所述移动量刚性变换转换关系式m进行运动学逆解,获得如下函数关系:
28、
29、式中,f(x)n为所述三坐标数控定位器在所述设备坐标系下x方向上的第n点所对应的位移量,f(y)n为所述三坐标数控定位器在所述设备坐标系下y方向上的第n点所对应的位移量,f(zn)为所述三坐标数控定位器在所述设备坐标系下y方向上的第n点所对应的位移量,αn表示各个球窝中心点在第n点时沿对应装配坐标系x轴旋转的角度,βn为各个球窝中心点在第n点时沿对应装配坐标系y轴旋转的角度,γn为各个球窝中心点在第n点时沿对应装配坐标系z轴旋转的角度。
30、可选地,所述根据所述位移量,建立所述虚轴与所述实轴之间的同步关系,包括:
31、根据所述位移量,建立所述实轴的位置与时间的关系,以重构各所述实轴的移动函数;
32、对所有所述实轴的起始点和终止点的移动量差值进行比较运算,以获取最大移动量q,并将所述移动量q按照所述实轴拆分点数进行等距离拆分,建立所述虚轴的位置与时间的关系,以重构所述虚轴的移动函数;
33、根据所述实轴的移动函数和所述虚轴的移动函数,将所述实轴和所述虚轴进行关联,以建立起所述虚轴与所述实轴之间的同步关系。
34、可选地,所述实轴的移动函数的表达式如下:
35、
36、式中,i为程序扫描时间,yiout为各实轴当前的位置,yin为各实轴在第n个插补点时各实轴的位置,yi(n+1)为各实轴在第n+1个插补点时的位置,其中yin、yi(n+1)由f(x)n、f(y)n、f(zn)计算得出;xin为各实轴在第n个插补点的时间,xi(n+1)为各实轴在第n+1个插补点的时间,xiin为各实轴运行的当前时间。
37、可选地,所述虚轴的移动函数的表达式如下:
38、
39、式中,ymaster_iout为虚轴当前的位置,ymaster_in为虚轴在第n个插补点时的位置,ymaster_i(n+1)为虚轴在第n+1个插补点时的位置,xmaster_in为各虚轴在第n个插补点的时间,xmaster_i(n+1)为虚轴在第n+1个插补点的时间,xmaster_iin为各实轴运行的当前时间。
40、为实现上述目的,本技术还提供一种多轴协同运动控制装置,包括:
41、第一计算模块,用于构建装配坐标系,基于所述装配坐标系,获得飞机部件从实际坐标到理论坐标的旋转平移量;
42、第二计算模块,用于根据所述旋转平移量,获得所述飞机部件旋转平移后的位姿移动量;
43、第三计算模块,用于构建各三坐标数控定位器对应的设备坐标系,并根据所述位姿移动量,以获得各所述三坐标数控定位器在对应所述设备坐标系下的位移量;其中,所述三坐标数控定位器上设有球窝,所述球窝用于对接所述飞机部件上的球头;
44、第一构建模块,用于在运动控制器中构建虚轴和实轴,以所述虚轴作为引导轴,以所述实轴作为跟随轴;其中,所述运动控制器用于控制各所述三坐标数控定位器同步运动;
45、第二构建模块,用于根据所述位移量,建立所述虚轴与所述实轴之间的同步关系;
46、协同控制模块,用于根据所述同步关系,以进行各所述三坐标数控定位器的协同运动控制。
47、为实现上述目的,本技术还提供一种计算机设备,该计算机设备包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序,实现上述的方法。
48、为实现上述目的,本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,处理器执行所述计算机程序,实现上述的方法。
49、本技术所能实现的有益效果如下:
50、本技术通过分别构建装配坐标系和设备坐标系,先根据装配坐标系计算获得飞机部件从实际坐标到理论坐标的旋转平移量,从而可计算获得飞机部件旋转平移后的位姿移动量,然后将位姿移动量结合设备坐标系,可计算获得各三坐标数控定位器在对应设备坐标系下的位移量,并根据位移量建立虚轴与实轴之间的同步关系,保证各轴运动的同步性,最后即可根据同步关系来实现对各三坐标数控定位器的协同运动控制,从而实现多轴协同运动的轨迹规划,保证了在运动控制器同一扫描周期内,可有效维持各个三坐标数控定位器的球窝之间的刚性状态,避免了各轴运动时对飞机部件产生拉扯,很好的实现了对飞机部件的低应力、精确装配功能。
- 还没有人留言评论。精彩留言会获得点赞!