一种并排无缝群组滑板随机组合快速运动控制方法
本发明属于机械自动化控制,尤其是一种并排无缝群组滑板随机组合快速运动控制方法。
背景技术:
1、自动化控制技术广泛用于工业、农业、军事、科学研究、交通运输、商业、医疗、服务和家庭等方面,采用自动化技术不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,极大地提高劳动生产率;
2、公开号为号cn 217832522 u的实用新型专利公开了一种海洋平台桩腿焊接翻转装置,涉及焊接的技术领域。一种海洋平台桩腿焊接翻转装置,包括底板、两组支板、支台、固定板、转轴、圆盘和伺服电机,支台通过两组支板固定安装在底板上端,固定板固定安装在支台上端,转轴转动安装在固定板上,圆盘固定安装在转轴右端,圆盘上设置有夹持装置,转轴的左端与伺服电机的输出端连接,伺服电机固定安装在固定板上;其中桩腿中部的支撑轮部分主体为往复运动的多组滑板机构,包括多组滑板、多组支撑轮、移动板、旋转轴、圆板、升降装置和移动装置,打开驱动电机,带动第一丝杠旋转,使得两组滑块相互远离,两组滑块通过两组连接板使两组圆轮相互远离,两组圆轮通过两组斜块使升降板上升,升降板通过多组滑板使多组支撑轮上升,至多组支撑轮的上端与桩腿的下端顶紧,使桩腿的中部被多组支撑轮支撑,然后打开伺服电机通过转轴使圆盘带动桩腿旋转,桩腿通过圆板带动旋转轴和摩擦轮旋转,至桩腿上的砂眼位于上端,然后旋转螺杆,螺杆带动摩擦盘下降,至摩擦盘的下端与摩擦轮上端接触顶紧后,之后使用外部的焊接装置对桩腿上的砂眼进行焊接修补即可;由于在对桩腿的焊接过程中,桩腿的右端被圆板上的夹持装置支撑,桩腿的中部被多组支撑轮支撑,所以减少了桩腿本身所受到的弯曲应力,减小了桩腿的变形,提高了焊接的过程中的可靠性,同时由于圆盘和圆板之间的距离可以调节,所以其可以夹持不同长度的桩腿,局限性低,使用方便,实用性高;
3、公开号为cn 215395776 u的实用新型专利公开了一种地板芯板穿帘机,涉及底板加工的技术领域。一种地板芯板穿帘机,包括底座、多组支柱、多组加强件、顶板、多组滑板、多组滑套、多组第一液压缸、多组伸缩柱、多组弹簧、按压架、按压板、多组拉簧、切割装置和输送装置,首先将需要切割的木板放置在输送装置上,通过打开多组第一液压缸向下推动多组滑板移动,使多组伸缩柱带动按压架向下移动,从而将输送装置上的多组木板进行同时按压固定,固定后的木板由切割装置进行切割开槽,通过设置按压板,提高多组木板同时固定的效果,减少木板切割时的晃动,提高切割精度,减少人员固定操作的工作强度,提高装置的工作效率。切割装置包括滑块、固定件、丝杠、第一电机、第二液压缸和切割机构,通过打开第一电机带动丝杠旋转,使滑块进行左右移动,滑块通过第二液压缸带动切割机构对输送装置上固定完成的多组木板进行切割开槽,提高木板开槽的加工效率以及稳定性,通过控制第二液压缸的伸缩长度带动切割机构进行升降调节,从而对开槽深度进行控制,提高装置对不同开槽深度控制的精准性,减少装置的使用局限性,提高装置的实用性。
4、公开号为cn 217136036 u的实用新型专利公开了一种多功能蔬菜播种机,属于蔬菜种植技术领域。包括移动车、种子箱、电机a、转轴、旋转轴、第一链轮、第二链轮、链条、落料管、多组播种管、多组阀门、多组滑板、多组犁头和升降装置。升降装置包括驱动电机、连接架、丝杠、升降块、支板和支撑板,驱动电机和连接架均固定安装在移动车上,丝杠转动安装在连接架上,丝杠的上端与驱动电机的输出端连接,丝杠与升降块螺装,支板和支撑板分别固定安装在升降块的左右两部,多组滑板均固定安装在支板上,多组播种管均固定安装在支撑板上;打开驱动电机,驱动电机带动丝杠旋转,旋转的丝杠通过升降块带动支板和支撑板下降,支板带动多组滑板下降,多组滑板带动多组犁头下降,至多组犁头插入至土地中合适的深度。由于多组犁头的高度可以调节,所以其可以根据蔬菜种子的不同在土地中梨出不同深度的沟壑,使用方便,局限性低,实用性高;
5、上述专利均采用可往复移动的滑板装置在焊接、底板加工、蔬菜种植等领域实现了自动化、少人化,提高了提高劳动生产率,降低生产成本,结构简单、实施方便。然而采用驱动电机与滚珠丝杠驱动滑板往复移动的过程中,由于中间传动结构的存在,使得传动链较长、传动间隙较大、较大程度上限制了设备的工作效率,无法在各个自动化生产线上实现滑板机构的快速响应;采用气缸实现滑板的上下移动,设备结构复杂、资源消耗大。
技术实现思路
1、发明目的:提供一种并排无缝群组滑板随机组合快速运动控制方法,以解决现有技术存在的上述问题。
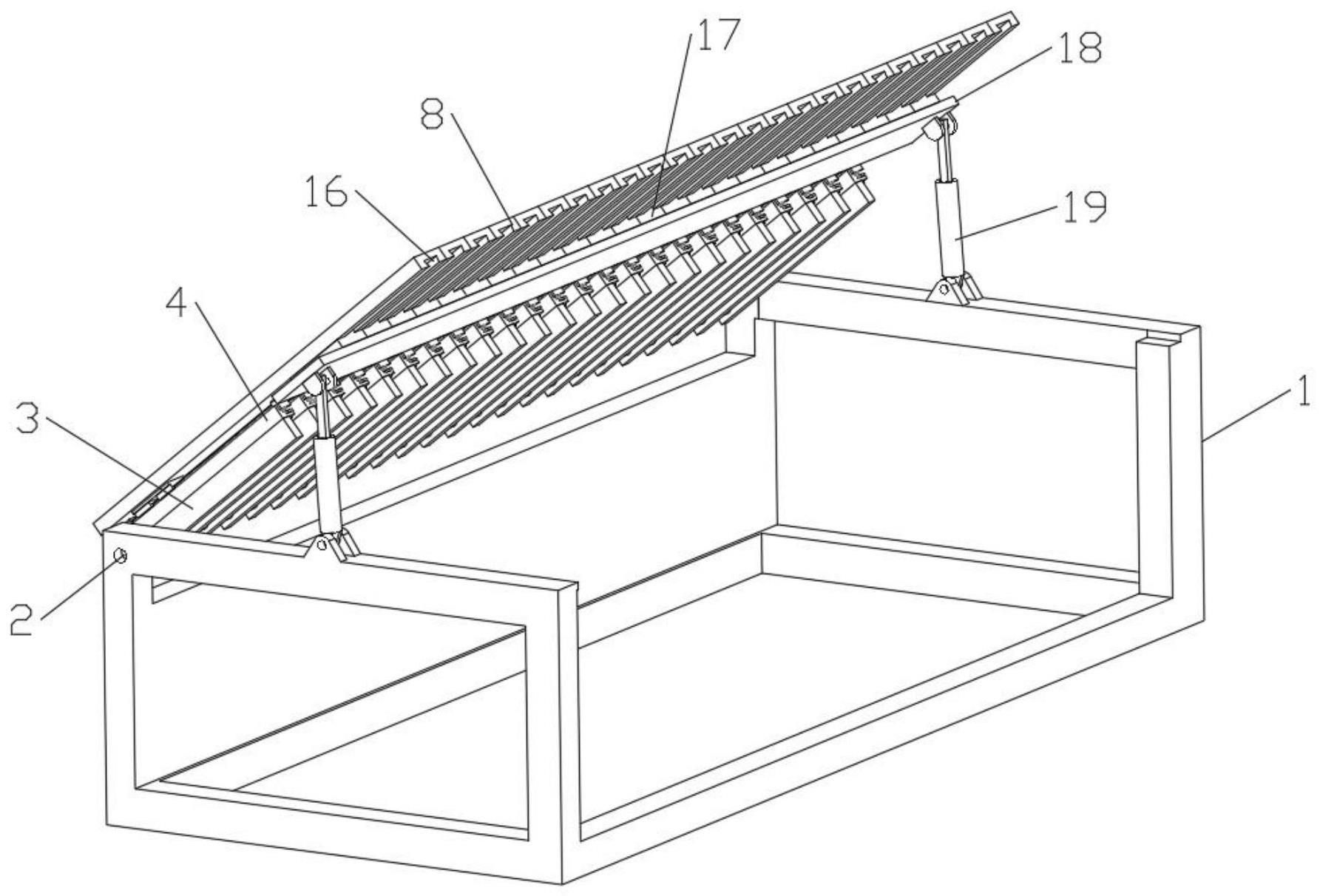
2、技术方案:一种并排无缝群组滑板,包括机架,所述机架顶部水平设有支撑杆,所述支撑杆外侧转动连接有若干个支撑板,各个所述支撑板顶面设有永磁直线同步电机,各个所述永磁直线同步电机顶面设有直线滑轨,各个所述直线滑轨外侧滑移连接有滑块,各个所述滑块顶面设有安装板,各个所述安装板顶面螺纹连接有滑板,各个所述滑板侧面无缝贴合,各个所述安装板折弯端延伸至永磁直线同步电机侧面且螺纹连接有连接板,各个所述连接板与永磁直线同步电机的动子侧面固定连接,各个所述永磁直线同步电机底部设有光栅尺,各个所述连接板远离滑块的一端延伸至光栅尺底部且设有透光孔,所述支架顶部设有用于调节滑板角度的调节件。
3、优选的,各个所述永磁直线同步电机两端分布有顶块,各个所述顶块靠近永磁直线同步电机的一侧与其对应的直线滑轨端部固定连接,各个所述顶块靠近滑块的一侧设有橡胶块,各个所述橡胶块与直线滑轨适配。
4、优选的,各个所述直线滑轨两侧沿其长度方向设有线槽,各个所述滑块内壁两侧设有凸棱,各个所述凸棱与线槽滑移连接。
5、优选的,所述调节件包括设置在各个滑板底面的楔形槽,各个所述楔形槽内部滑移连接有楔形块,各个所述楔形块底面延伸出楔形槽且设有同一个条形板,所述支架顶部转动连接有两个液压杆,两个所述液压杆的输出端与条形板底面固定连接。
6、一种模糊自抗扰控制器,设计方法包括以下步骤:
7、步骤一、明确被控系统需要操纵的输入量给定永磁直线同步电机动子速度v,被控系统的输出量为永磁直线同步电机q轴电流iq*;
8、步骤二、建立永磁直线同步电机的数学模型来确定自抗扰控制器的阶数;
9、步骤三、通过将各种已知、未知分量定义系统的干扰信号;
10、步骤四、设计模糊逻辑,将其与自抗扰控制器中的非线性状态误差反馈律相结合,在线调整非线性状态误差反馈律的参数,实现群组滑板的快速响应。
11、优选的,步骤二中所述永磁直线同步电机在d-q轴旋转坐标下的数学模型为:
12、
13、电磁推力方程为:
14、
15、运动方程为:
16、
17、式中:fe为电磁推力;ud、uq、id、iq分别为d、q轴电压、电流分量;rs为电枢绕组电阻;v为动子速度;lsd、lsq分别为d、q轴电感;ψf为永磁体磁链;τ为永磁体极距;np为极对数;fl为系统总扰动;m为动子质量;bm为粘滞摩擦系数。
18、一种并排无缝群组滑板的控制方法,具体控制流程包括以下步骤:
19、s1、永磁直线同步电机vr经td过渡后得到跟踪信号v1,并提取其一次微分信号v2,使得滑板移动响应迅速;
20、s2、通过eso作用实时估计系统的运行状态并得到系统扰动的观测值,如永磁直线同步电机自身温度的变化,以及电阻、电感变化带来的内部扰动y1以及外部负载扰动y3;
21、s3、v1、v2分别与来自永磁直线同步电机q轴电流iq经eso给出其估计值y1和其微分信号y2做比较后得到误差信号e1和e2;
22、s4、被控对象vr所受外部负载经过eso扩张观测后得到系统外部扰动的实时作用量的估计y3,y3对控制量u进行u=u0-(y3+f0(y1,y2))/b0进行主动反馈补偿扰动,形成具有自动补偿系统扰动的反馈结构,实现不确定系统的动态线性化;
23、s5、误差信号e1和e2同时输入至模糊控制器得到nlsef最优参数后将其作为nlsef的输入得到运行过程中iq的控制量u0,对各种扰动进行补偿;
24、其中,vr是给定输出永磁直线同步电机转速;v1是vr的跟踪信号;v2为vr的微分信号;u0为系统运行过程中iq的控制量;u为补偿控制量;y1为v的跟踪信号;v为永磁直线同步电机动子实时速度由旋转编码器采集;y2为y1的微分信号;y3为系统外部负载扰动观测量;f0(y1,y2)为系统已知内部扰动。
25、优选的,所述步骤s1~s6中多套并联的永磁直线同步电机控制系统接收来自上位机的同一指令信号,运行状态相互独立。
26、综上所述,本发明的有益效果是:
27、1、通过永磁直线同步电机驱动滑块在直线滑轨上往复滑动,并带动滑板同步往复直线运动,克服了传统的旋转电机要通过链条、齿轮等部件构成的传动机构才能完成被驱动元件的直线运动过程中驱动链长、传动效率低、工作稳定性差等问题。
28、2、通过液压杆推动条形板带动楔形块在滑板底部的楔形槽中滑动,使得滑板转动,对其角度进行调节,提高群组滑板普适性。
29、3、针对永磁直线同步电机直接与负载连接对负载变化敏感从而产生推力波动的现象对永磁直线同步电机转速环速度调节器进行改进,设计了模糊自抗扰控制器,将矢量控制和模糊自抗扰的控制策略集成,结合了模糊控制与自抗扰控制的优点,将模糊规则用于补偿非线性状态误差反馈律,将跟踪误差信号及其微分信号输入到模糊自抗扰控制器中利用模糊控制规则在线修改自抗扰参数,以满足滑板往复运动时对自抗扰控制参数的要求,该控制器结构简单,可以充分改进由于对该运动系统精度、稳定性和快速响应的严格要求而导致的输入信号平滑、运动扰动、参数之间难以匹配等现象,使得系统具有较高的准确性和鲁棒性。
30、4、针对群组滑板采用多永磁直线同步电机并行控制策略,对被控制永磁直线同步电机发送指令后,各永磁直线同步电机根据指令运行,互不干扰,永磁直线同步电机之间具有相互对立的关系,具有控制方式和控制原理简单、起停信号无时延等优点。
31、5、通过单个永磁直线同步电机基于矢量控制和模糊自抗扰的控制与多个单机并行控制策略的高度集成,实现了单个滑板之间互不干扰、任意多个滑板配合联动的控制结果,使得本系统定位精度高、机械构造简单、高效节能、响应迅速、稳定性高,每个滑板皆可独立响应,又可与其他任何滑板形成滑板组进行联合响应,滑板的随机组合能够实现在多种位置的迅速响应,能够面对不同负载下的多种需求,有效消除了负载对整个系统鲁棒性的影响。
- 还没有人留言评论。精彩留言会获得点赞!