基于船舶拖缆张力监测的模型自适应最优控制方法及系统与流程
本发明涉及船舶自动控制,尤其涉及一种基于船舶拖缆张力监测的模型自适应最优控制方法及系统。
背景技术:
1、随着人类对海洋探索的不断深入,对船舶航行作业安全的要求也越来越高。船舶运动操纵设备,用以实现船舶航速、航向的自动控制,是船舶开展航行、作业的重要保障。
2、在船舶运动操纵领域,有一类特殊的被控对象-拖带作业船舶。拖带作业船舶在进行海上作业时,需要拖带相应作业设备航行,如水声测量船、布缆船、科考船、救援船、rov支持船等。拖带作业船舶在进行单船航行和拖带作业航行时,由于拖带物拖缆拉力的作用,船舶的运动性能具有显著差异;同时,由于拖带物与船舶多为柔性连接,拖带作业船舶在加速、减速、转艏等不同航行状态下,在拖带不同密度、体积、缆长的拖带物体时,又进一步呈现出不同的操纵性能。对于单船航行、拖带航行以及不同拖带工况下船舶运动参数的变化,如不加以考虑,极易出现控制超调、震荡等现象,导致控制精度变差,甚至引起严重的安全性问题。
技术实现思路
1、有鉴于此,本发明实施例提供了一种基于船舶拖缆张力监测的模型自适应最优控制方法及系统,解决了对船舶进行操纵控制时控制精度较低的技术问题。
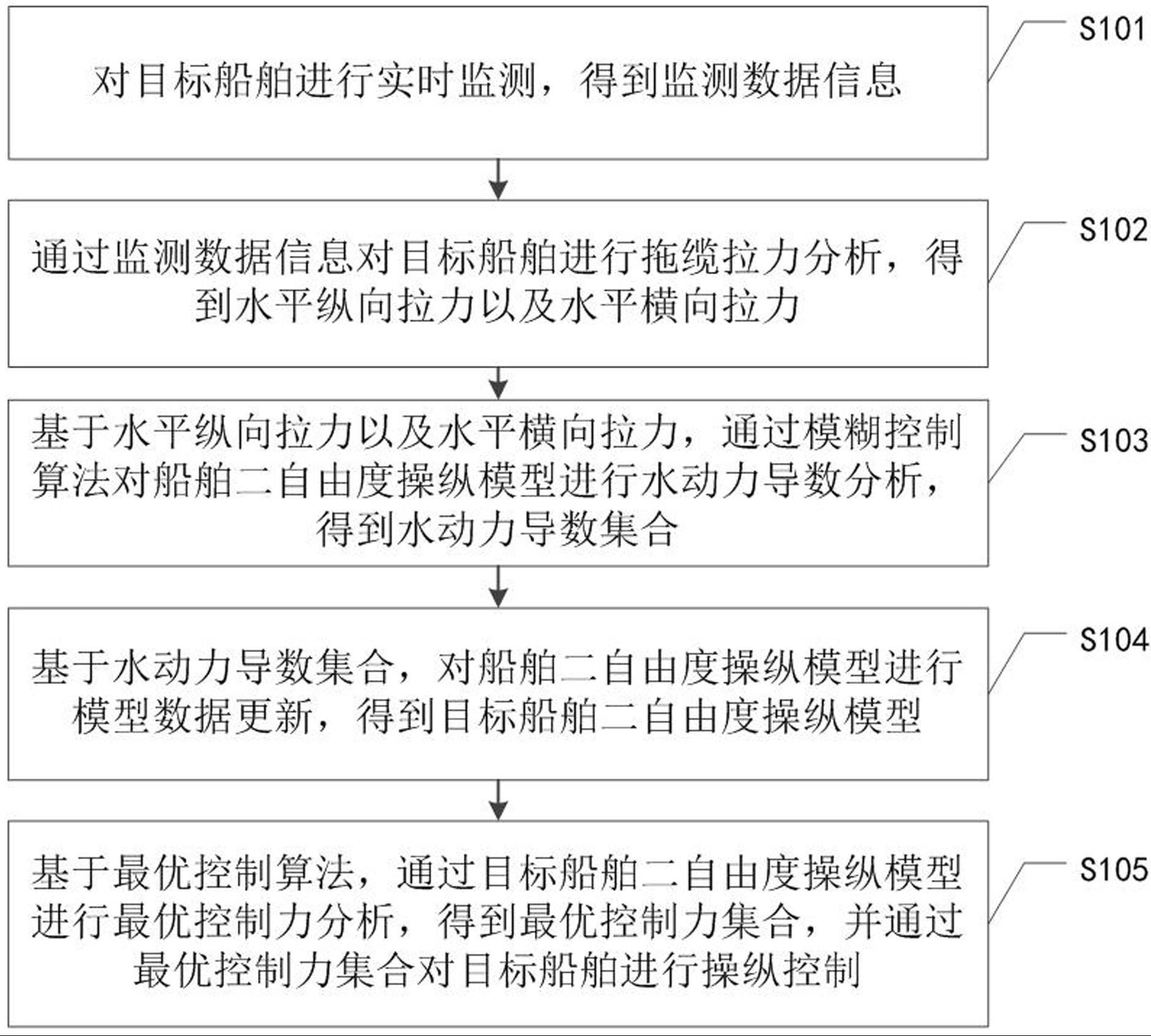
2、本发明提供了一种基于船舶拖缆张力监测的模型自适应最优控制方法,包括:对目标船舶进行实时监测,得到监测数据信息;通过所述监测数据信息对所述目标船舶进行拖缆拉力分析,得到水平纵向拉力以及水平横向拉力;基于所述水平纵向拉力以及所述水平横向拉力,通过模糊控制算法对船舶二自由度操纵模型进行水动力导数分析,得到水动力导数集合;基于所述水动力导数集合,对所述船舶二自由度操纵模型进行模型数据更新,得到目标船舶二自由度操纵模型;基于最优控制算法,通过所述目标船舶二自由度操纵模型进行最优控制力分析,得到最优控制力集合,并通过所述最优控制力集合对所述目标船舶进行操纵控制。
3、在本发明中,所述对目标船舶进行实时监测,得到监测数据信息步骤,包括:通过预置的第一传感器对所述目标船舶进行拖缆张力监测,得到船舶拖缆张力;通过预置的第二传感器对所述目标船舶进行方向角监测,得到所述目标船舶的方向角集合;对所述目标船舶进行缆绳坐标系分析,确定目标缆绳坐标系,并将所述船舶拖缆张力、所述方向角集合以及所述目标缆绳坐标系进行数据合并,得到所述监测数据信息。
4、在本发明中,所述通过所述监测数据信息对所述目标船舶进行拖缆拉力分析,得到水平纵向拉力以及水平横向拉力步骤,包括:通过所述方向角集合以及所述船舶拖缆张力进行水平纵向拉力计算,得到水平纵向拉力;通过所述方向角集合以及所述船舶拖缆张力进行水平横向拉力计算,得到水平横向拉力。
5、在本发明中,所述通过所述方向角集合以及所述船舶拖缆张力进行水平纵向拉力计算,得到水平纵向拉力步骤,包括:基于所述方向角集合以及所述船舶拖缆张力,通过水平纵向拉力计算公式进行水平纵向拉力计算,得到水平纵向拉力,其中,所述水平纵向拉力计算公式如下所示:
6、
7、其中,为水平纵向拉力,为所述方向角集合中的第一方向角,为所述方向角集合中的第二方向角,为船舶拖缆张力。
8、在本发明中,所述通过所述方向角集合以及所述船舶拖缆张力进行水平横向拉力计算,得到水平横向拉力步骤,包括:基于所述方向角集合以及所述船舶拖缆张力,通过水平横向拉力计算公式进行水平横向拉力计算,得到水平横向拉力,其中,所述水平横向拉力计算公式如下所示:
9、
10、其中,为水平横向拉力,为所述方向角集合中的第一方向角,为所述方向角集合中的第二方向角,为船舶拖缆张力。
11、在本发明中,所述基于所述水平纵向拉力以及所述水平横向拉力,通过模糊控制算法对船舶二自由度操纵模型进行水动力导数分析,得到水动力导数集合步骤,包括:通过所述水平纵向拉力以及所述水平横向拉力进行拉力变化率分析,得到水平纵向拉力变化率以及水平横向拉力变化率;通过模糊控制算法,将所述水平纵向拉力以及所述水平纵向拉力变化率输入所述船舶二自由度操作模型进行水动力导数分析,得到船舶纵向水动力导数集合;通过模糊控制算法,将所述水平横向拉力以及所述水平横向拉力变化率输入所述船舶二自由度操作模型进行水动力导数分析,得到船舶艏向水动力导数集合;将所述船舶纵向水动力导数集合以及所述船舶艏向水动力导数集合合并为所述水动力导数集合。
12、在本发明中,所述基于所述水动力导数集合,对所述船舶二自由度操纵模型进行模型数据更新,得到目标船舶二自由度操纵模型步骤,包括:基于所述水动力导数集合,通过模型更新公式对所述船舶二自由度操纵模型进行模型数据更新,得到目标船舶二自由度操纵模型,其中,所述模型更新公式如下所示:
13、
14、
15、其中,表示目标船舶的纵向速度、表示目标船舶的旋转角速度,表示目标船舶的纵向速度导数、表示目标船舶的旋转角速度导数;为目标船舶的纵向惯性质量,为目标船舶的转动惯量;为船舶纵向水动力一阶导数;为船舶纵向水动力二阶导数;为船舶艏向水动力一阶导数,为船舶艏向水动力二阶导数;为目标船舶的纵向总推力、为目标船舶的转艏总力矩。
16、本发明还提供了一种基于船舶拖缆张力监测的模型自适应最优控制系统,包括:
17、数据获取模块,用于对目标船舶进行实时监测,得到监测数据信息;
18、第一分析模块,用于通过所述监测数据信息对所述目标船舶进行拖缆拉力分析,得到水平纵向拉力以及水平横向拉力;
19、第二分析模块,用于基于所述水平纵向拉力以及所述水平横向拉力,通过模糊控制算法对船舶二自由度操纵模型进行水动力导数分析,得到水动力导数集合;
20、数据更新模块,用于基于所述水动力导数集合,对所述船舶二自由度操纵模型进行模型数据更新,得到目标船舶二自由度操纵模型;
21、操纵控制模块,用于基于最优控制算法,通过所述目标船舶二自由度操纵模型进行最优控制力分析,得到最优控制力集合,并通过所述最优控制力集合对所述目标船舶进行操纵控制。
22、本发明提供的技术方案中,对目标船舶进行实时监测,得到监测数据信息;通过监测数据信息对目标船舶进行拖缆拉力分析,得到水平纵向拉力以及水平横向拉力;基于水平纵向拉力以及水平横向拉力,通过模糊控制算法对船舶二自由度操纵模型进行水动力导数分析,得到水动力导数集合;基于水动力导数集合,对船舶二自由度操纵模型进行模型数据更新,得到目标船舶二自由度操纵模型;基于最优控制算法,通过目标船舶二自由度操纵模型进行最优控制力分析,得到最优控制力集合,并通过最优控制力集合对目标船舶进行操纵控制,在本发明中,将操纵模型的自适应更新与最优控制结合起来,通过拖缆张力及角度的实时监测,采用模糊控制箱,将拖带物的拉力影响转换为船舶水动力导数的在线更新,实现最优控制算法的操纵模型自适应,达到船舶航向、航速的最优控制,由于拖带作业船舶在单船航行、拖带航行以及拖带航行不同运动状态下,都具有显著的操纵特性差异,通过采用基于拖缆张力的运动模型自适应,使船舶操纵最优控制器能够适应船舶在单船航行、不同状态拖带航行下的操纵特性,提升航速、航向控制精度,以进一步提升对船舶进行操纵控制时的控制精度。
- 还没有人留言评论。精彩留言会获得点赞!