多模式多类型非对称S型柔性速度曲线双向快速规划方法与流程
本发明属于运动控制系统,具体涉及一种多模式多类型非对称s型柔性速度曲线双向快速规划方法。
背景技术:
1、制造业是国民经济的主体。而工业控制即工业自动化是高端装备制造业的支柱产业,其中,可编程逻辑控制器(plc)是现代工业自动化的三大支柱之一,给各种自动化控制设备提供更高效、更高速、更灵活、更可靠的控制,在冶金、石油化工、电力、交通运输、机械制造、环保等行业有着广泛的应用。现代plc集成运动控制功能模块,主要应用于数控机床、机器人、包装、造纸、光伏、锂电、3c等行业。在实际加工制造中,通过对设备驱动轴的进给速度进行加减速控制来避免和减小设备在启停时产生冲击、振动,以提高加工精度和产品质量。因此,满足高速、高效、高灵活、高精度要求的柔性加减速控制是现代高性能运动控制系统的核心技术之一。传统的直线和指数型加减速控制方法虽实现简单,但加减速过程中,加速度存在突变,由于加速度的不连续性,故存在较大的柔性冲击,特别是高速运行以及一些惯性负载和弹性机构,会产生非期望的结果,这影响产品的加工精度以及设备自身的使用寿命,仅适用于对控制精度要求不高的中低端场合。为了保证设备在加减速过程中加速度的连续性,减小系统的柔性冲击,提升加工精度,满足高速、高精度的控制要求,通常采用s型柔性加减速控制方法。
2、常用的s型柔性加减速方法主要有基于三角函数的加减速控制、基于多项式的加减速控制和七段式加减速控制。中国专利[cn108287527b]公开了一种基于三角函数的改进s曲线加减速控制方法,虽能使运动曲线平滑,但是三角函数计算复杂,需要大量资源才能在嵌入式系统上运行,计算耗时,难以满足嵌入式运控系统的实时性。基于多项式的加减速控制,通过对时间的连续高阶求导,可以获得平滑的曲线,当阶数越高时,曲线平滑度越大,同时曲线的约束条件也越多,对应的最大速度、加速度和加加速度也越大,计算量也随着更大,实际中,由于驱动轴电机的物理特性,所能提供的转速和扭矩都有其上限。故这两种柔性加减速控制方法在实际运控系统中应用较少。七段式s型加减速控制通过将加减速过程分为加加速段、恒加速段、减加速段、恒速段、加减速段、恒减速段、减减速段共7个阶段,来避免在启动、运行和停止时加加速的脉冲点,保证在整个加减速过程中加速度的连续,来减小系统的柔性冲击。中国专利[cn109991932b]“一种物流搬运设备s曲线加减速速度规划与控制方法”和中国专利[cn104181860b]“数控机床s型加减速控制方法”都是基于七段式s型加减速控制对运行曲线进行平滑处理,减小系统的柔性冲击,提升加工精度。但是七段式s型加减速控制需要根据给定目标位置的大小进行多种复杂的情况分类,需要根据给定的参数约束通过繁杂的不等式判断来确定加减速边界,规划参数需要通过多次开方以及二分法和牛顿迭代法等数值分析方法才可求得,运算复杂,计算量大,当控制精度要求高时,基于迭代的求解方法计算量也会大幅增加,耗时长,难以满足高效率的控制要求,在某些极端情况,超出迭代求解次数时甚至会导致系统死机、不稳定等严重后果。有学者提出一种基于三次多项式的减速度控制方法,能始终保证在整个运行过程中加速度的连续,减小系统的柔性冲击,提升设备运行的稳定性,同时该方法规划分类情况较少,规划参数的计算只涉及少量的四则运算,无需复杂的计算就可得到规划参数的解析解,算法实现简单、便捷,可以实现运行曲线的快速规划,系统运行效率高。但是该算法的加速和减速过程是对称的,加速和减速过程存在耦合关系,这将造成不管在何种工况下运行系统只能提供相同的输出扭矩,驱动轴电机的特性难以完全发挥,只适用于某些特定的场合,大大限制了s曲线规划的灵活性,难以满足多场合全工况的规划与控制,对非对称式的加减速控制等未做进一步的推导和研究。
3、目前公开的关于“柔性加减速控制”的技术和资料,一部分方案是给定规划的最大加速度和最大减速度,将运行曲线约束在预设的边界中,但是此种方案没有考虑实际的加速段时间和减速段时间,用户需经过多次调试才能达到预期的结果;一部分方案是给定加速时间和减速时间,让设备按预设的加减速时间完成加速段和减速段的曲线运动,这种方案调试方便,但未考虑驱动轴电机的实际最大加减速能力。对于如光伏、锂电、芯片等有成百上千道工序的行业,有大量的点对点运动,需要根据不同的工艺要求采用不同方案的加减速控制。同时,位置运动一般分为绝对式运动和增量式运动,实际生产制造中,会根据不同的生产需求采用不同的运动类型。此外,目前公开的加减速控制文献,大多是围绕目标位置为正向进行研究,较少有针对目标位置为负时的规划和研究,缺少对目标位置为负的有效处理,倘若照搬目标位置为正的规划,会造成系统资源空间的浪费。一种既兼容基于时间单位加减速控制和基于运动单位加减速控制等多模式,又支持多运动类型的双向柔性快速规划控制方法,目前关于加减速控制的技术和资料还没有公开的转化方法。因此,亟待一种既能保证加速度连续,无柔性冲击,满足高速、高精度的要求,又能保证算法实现简单,满足高效率、高灵活性、快速、用户友好要求的多模式多类型柔性加减速控制方法。
技术实现思路
1、针对现有技术的不足,本发明提出一种多模式多类型非对称s型柔性速度曲线双向快速规划方法,通过时间单位模式、运动单位模式、最大值百分比模式进行多模式的曲线规划,同时,支持绝对式和增量式的多类型位置运动。在加减速控制中对运动方向进行归一处理实现正负双向曲线规划。通过加速段和减速段的分开控制,实现非对称的曲线规划,同时保证整个规划过程中加速度连续,规划分类少,规划参数易求取,以保证无柔性冲击,满足高速、高精度的控制要求,又能保证算法实现简单,实现高效率、高灵活性、快速、用户友好的控制要求。具体实现方式如下:
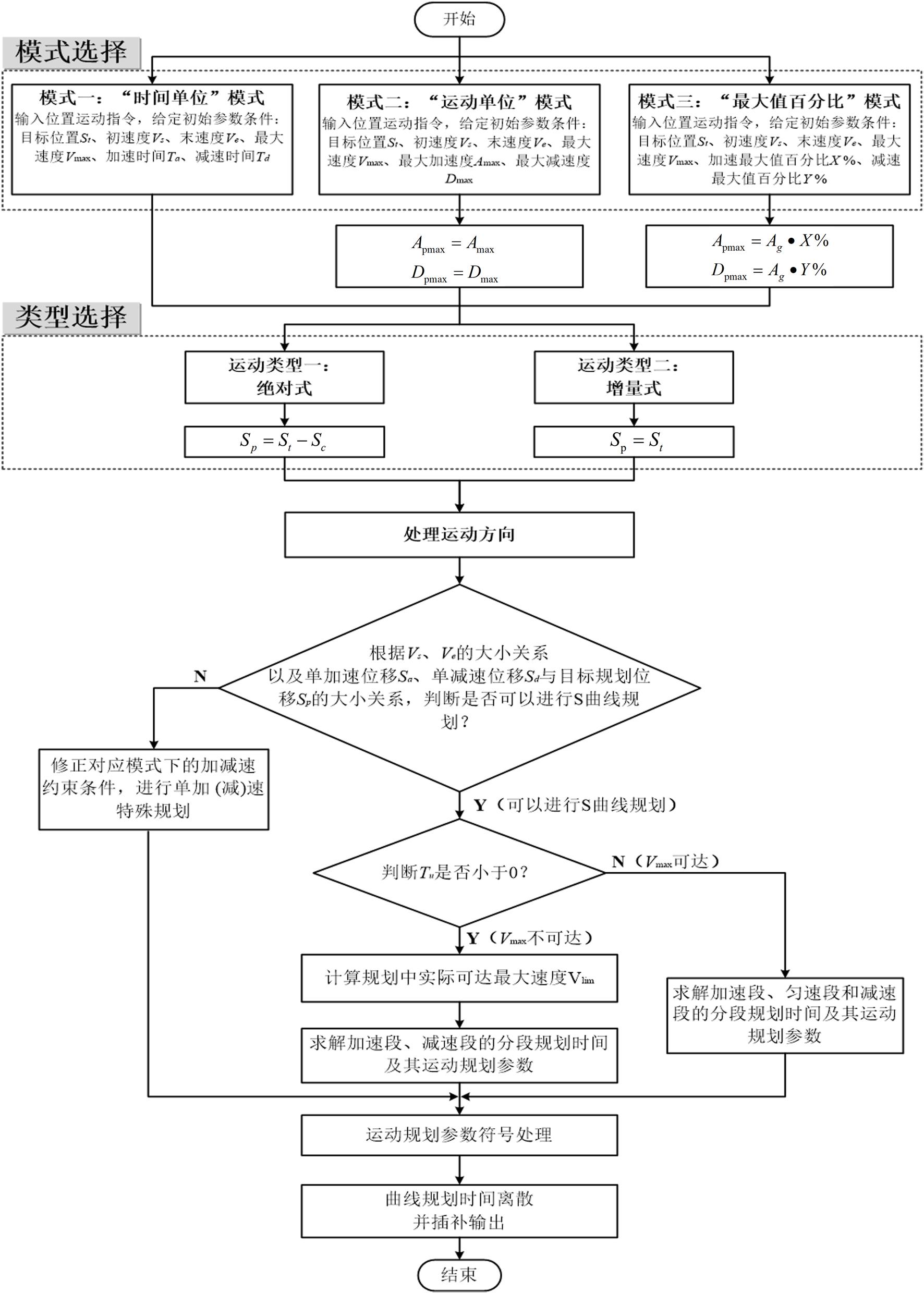
2、一种多模式多类型非对称s型柔性速度曲线双向快速规划方法,该方法包括:
3、s1.从模式一“时间单位”模式、模式二“运动单位”模式和模式三“最大值百分比”模式中选定规划模式,并给定相应的初始参数条件;
4、s2.进行绝对式运动和增量式运动的运动类型选择,根据所选的运动类型计算目标规划位置 s p;
5、s3.对运动方向进行处理,实现正、负双向曲线规划;
6、s4.根据初速度 v s与末速度 v e的大小关系,判断是否可以进行s曲线规划,若不满足s曲线规划条件,则进行单加或单减速特殊曲线规划,随后执行s7;
7、s5.若s4中满足s曲线规划条件,进行s曲线规划;
8、s6.判断是否存在匀速段后,分类进行相应始末运动规划参数的计算;
9、s7.根据目标规划位置 s p的正负进行运动规划参数的符号转换处理;
10、s8.将得到的各分段始末运动规划参数及分段规划时间通过控制周期进行曲线离散插补输出。
11、本技术通过时间单位模式、运动单位模式、最大值百分比模式,实现多模式的曲线规划,通过绝对式位置和增量式位置运动,实现多运动类型的曲线规划,以满足多工艺多生产要求用户友好的加减速控制。
12、在上述的多模式多类型非对称s型柔性速度曲线双向快速规划方法中,所述步骤s1中包括:
13、若选择模式一“时间单位”模式,初始参数条件为目标位置 s t、初速度 v s、末速度 v e、最大速度 vmax、加速时间 t a、减速时间 t d,其中, vmax、 t a、 t d始终为大于0的实数;
14、若选择模式二“运动单位”模式,初始参数条件为目标位置 s t、初速度 v s、末速度 v e、最大速度 vmax、最大加速度 amax、最大减速度 dmax,其
15、中, vmax、 amax、 dmax始终为大于0的实数;
16、若选择模式三“最大值百分比”模式,初始参数条件为,目标位置 s t、初速度 v s、末速度 v e、最大速度 vmax、加速最大值百分比 x%、减速最大值百分比 y%,其中, vmax、 x、 y始终为大于0的实数。
17、在上述的多模式多类型非对称s型柔性速度曲线双向快速规划方法中,所述步骤s2包括:
18、根据所选的运动类型计算目标规划位置 s p,设目标位置为 s t, s c为系统当前的位置;
19、若选择绝对式运动,则目标规划位置;
20、若选择增量式运动,则目标规划位置 s p= s t;
21、其中,当前位置 s c为系统开机后位置的累加,表达式如下:
22、,m=1,2,3…为正整数;
23、所述步骤s3包括:
24、若目标规划位置 s p小于0,即运行方向为负向,则将 s p、 v s、 v e进行转换,归一成正向进行曲线规划,具体如下:
25、 (1)
26、得: (2)。
27、本技术在加减速控制中对运动方向进行归一处理实现双向曲线规划,节约系统资源空间,整个规划过程中加速度始终保持连续,以保证无柔性冲击,满足高可靠、高精度的控制要求,规划分类少、规划参数可快速求取,满足高效率、高速的控制要求,提升了控制系统的运行速度和加工效率。
28、在上述的多模式多类型非对称s型柔性速度曲线双向快速规划方法中,所述步骤s4包括:
29、若选择模式一“时间单位”模式,具体如下:
30、若 v s< v e,则单加速段位移 s a0的计算表达式为:
31、 (8)
32、若 s p> s a0,则s曲线轨迹规划可行;若 s p≤ s a0,则需要根据 s p将 t a修正为 t a0,根据式(9)进行单段加速特殊曲线规划, t a0修正表达式为:
33、 (9)
34、若 v s= v e,不存在单加速段或单减速段的情况,始终满足s曲线规划的条件;
35、若 v s> v e,则单减速段位移 s d0的计算表达式为:
36、 (10)
37、若s p>s d0,则s曲线轨迹规划可行;若s p≤s d0,则需要根据s p将 t d修正为 t d0,根据式(11)进行单段减速特殊曲线规划, t d0修正表达式为:
38、 (11);
39、若选择模式二“运动单位”模式或模式三“最大值百分比”模式,具体如下:
40、若 v s< v e,单加速段位移 s a0的计算表达式如下:
41、 (33)
42、若 s p> s a0,则s曲线轨迹规划可行;若 s ≤ s a0,则需要根据 s p对 apmax进行修正,并计算单段加速时间 t a0,根据式(34)、式(35)进行单段加速特殊曲线规划, apmax的修正表达式和 t a0的计算表达式分别如下:
43、 (34)
44、 (35)
45、若 v s= v e,则不存在单加速段或单减速段的情况,始终满足s曲线规划的条件;
46、若 v s> v e,单减速段位移 s d0的计算表达式如下:
47、 (36)
48、若 s p> s d0,则s曲线轨迹规划可行;若 s p≤ s d0,则需要根据 s p对 dpmax进行修正,并计算单段减速时间 t d0,根据式(37)、式(38)进行单段减速特殊曲线规划, dpmax的修正表达式和 t d0的计算表达式分别如下:
49、 (37)
50、 (38)。
51、在上述的多模式多类型非对称s型柔性速度曲线双向快速规划方法中,所述步骤s5包括,设运动过程中实际速度最大值为 vlim,匀速段的运行时间为 t u;
52、若选择模式一“时间单位”模式,首先假设 vlim= vmax,此时加速段位移的计算表达式和减速段位移的计算表达式分别如下:
53、 (12)
54、 (13)
55、通过式(12)和(13)可得匀速段的运行时间 t u的计算表达式如下:
56、 (14)
57、若 t u>0,则给定最大速度 vmax可达,上述的式(14)所求得时间参数可用于加速段、匀速段和减速段中各分段始末运动规划参数的计算;
58、若 t u≤0,这表明实际运行速度最大值 vlim小于 vmax,即 vlim< vmax;
59、当 vlim< vmax时,无匀速段, vlim与 s p满足以下关系:
60、 (15)
61、由式(15)可求得实际运行中最大速度 vlim为:
62、 (16)
63、若选择模式二“运动单位”模式或模式三“最大值百分比”模式,首先假设 vlim= vmax,此时,加速段时间和位移的计算表达式分别为:
64、 (39)
65、 (40)
66、减速段时间和位移的计算表达式分别为:
67、 (41)
68、 (42)
69、进一步,可求得匀速段的运行时间 t u的计算表达式如下:
70、 (43)
71、若 t u>0,则给定最大速度 vmax可达,上述的式(39)、(41)和(43)所求得时间参数可用于加速段、匀速段和减速段中各分段始末运动规划参数的计算;
72、若 t u≤0,这表明实际运行速度最大值 vlim小于 vmax,即 vlim< vmax;
73、当 vlim< vmax时,无匀速段, vlim与 s p满足以下关系:
74、 (44)
75、由式(44)可求得实际运行中最大速度 vlim为:
76、 (45)
77、据式(45)可计算出加速段时间 t a和减速段时间的计算表达式分别为:
78、 (46)
79、 (47)。
80、在上述的多模式多类型非对称s型柔性速度曲线双向快速规划方法中,所述步骤s6包括:
81、设加速段时间为 t a,匀速段时间为 t u,减速段时间为 t d,最大速度 vmax,实际运行可达最大速度 vlim,设第 k段的初加加速度为 j sk,第 k段的初加速度为 a sk,第 k段的末加速度为 a ek,第 k段的初速度为 v sk,第 k段的末速度为 v ek,第 k段的位置为 s k,其中, k=1,2,3…;
82、当 s p> s a0( s p> s d0)满足s曲线规划时,各分段相应始末运动规划参数计算如下:
83、当 t u>0时,存在匀速段, vmax可达,加速段时间为 t a,匀速段时间为 t u,减速段时间为 t d,相应始末运动规划参数如下:
84、第一段为加速段,由 v s加速运动至 vmax,加速时间为 t a,此时 k=1,相应始末运动规划参数为:
85、 (17)
86、第二段为匀速段,保持 vmax匀速运动,匀速时间为 t u,此时 k=2,第二段始末运动参数为:
87、 (18)
88、第三段为减速段,由 vmax减速运动至 v e,减速时间为 t d,此时 k=3,第三段始末运动参数为:
89、 (19)
90、当 t u≤0时,不存在匀速段, vmax不可达,实际运行可达最大速度为 vlim,加速段时间为 t a,减速段时间为 t d,相应始末运动规划参数如下:
91、第一段为加速段,由 v s加速运动至 vlim,此时 k=1,相应始末运动规划参数为:
92、 (20)
93、第二段为即减速段,由 vlim减速运动至 v e,此时 k=2,第二段始末运动参数为:
94、 (21)
95、当 s p≤ s a0不满足s曲线规划时,需进行单段加速特殊曲线规划,相应始末运动规划参数计算如下:
96、 (22)
97、当 s p≤ s d0,需进行单段减速特殊曲线规划,相应始末运动规划参数计算如下:
98、 (23)。
99、本技术对运动规划时间及运动规划参数的求解仅涉及到简单四则运算,无需复杂的迭代求解,且规划分类情况少,可实现曲线的快速规划。
100、在上述的多模式多类型非对称s型柔性速度曲线双向快速规划方法中,所述步骤s7包括:
101、若目标规划位置 s p为正,前述得到的各分段始末运动规划参数直接输出;
102、若目标位置 s p为负,根据式(24)对运动规划参数进行符号转换处理,实现负方向的曲线规划:
103、 (24)。
104、在上述的多模式多类型非对称s型柔性速度曲线双向快速规划方法中,所述步骤s8包括:
105、当满足s曲线规划时,曲线离散插补输出包括:
106、当 t u>0, vmax可达,曲线规划为加速阶段、匀速阶段、减速阶段,加速阶段、匀速阶段和减速阶段的曲线离散插补输出表达式分别如下:
107、当时, i= nt s/ t a,其中,n=1,2,3…为正整数,曲线离散插补输出
108、表达式为:
109、 (25)
110、当时,,曲线离散插补输出表达式为:
111、 (26)
112、当时,,曲线离散插补输出表达式为:
113、 (27)
114、当tu≤0,vmax不可达,实际运行可达最大速度为vlim,曲线规划为加速阶段、减速阶段,加速阶段和减速阶段的曲线离散插补输出表达式分别如下:
115、当时, i= nt s/ t a,其中,n=1,2,3…为正整数,曲线离散插补输出表达式为:
116、 (28)
117、当时,,曲线离散插补输出表达式为:
118、 (29)
119、当不满足s曲线规划时,曲线离散插补输出具体如下:
120、当 s p≤ s a0时,需进行单段加速特殊曲线规划,曲线离散插补输出表达式为:
121、 (30)
122、当 s p≤ s d0时,需进行单段减速特殊曲线规划,曲线离散插补输出表达式为:
123、 (31)。
124、在上述的多模式多类型非对称式s型柔性速度曲线双向快速规划方法中,若选择模式二“运动单位”模式,所述步骤s1还包括:根据给定初始参数条件计算规划最大加速度 apmax和规划最大减速度 dpmax,计算表达式为:
125、 (32)。
126、在上述的多模式多类型非对称式s型柔性速度曲线双向快速规划方法中,若选择模式三“最大值百分比”模式,所述步骤s1还包括:根据给定初始参数条件和驱动轴能达到加速度最大值 a g计算规划最大加速度 apmax和规划最大减速度 dpmax,如下:
127、 (48)。
128、与现有技术相比,本发明的有益效果体现在:
129、(1)通过时间单位模式、运动单位模式、最大值百分比模式,实现多模式的曲线规划,通过绝对式位置和增量式位置运动,实现多运动类型的曲线规划,以满足多工艺多生产要求用户友好的加减速控制。
130、(2)通过加速段和减速段的分开独立控制,实现非对称的曲线规划,提升s曲线加减速控制的灵活性,满足多场合全工况的规划与控制。
131、(3)在加减速控制中对运动方向进行归一处理实现双向曲线规划,节约系统资源空间,整个规划过程中加速度始终保持连续,以保证无柔性冲击,满足高可靠、高精度的控制要求,规划分类少、规划参数可快速求取,满足高效率、高速的控制要求,提升控制系统的运行速度和加工效率。
132、(4)本发明同样适用于如数控机床、机器人等其他运动控制系统。
- 还没有人留言评论。精彩留言会获得点赞!