一种电动汽车电机光滑非线性分数阶滑模控制方法及系统
本发明涉及新型电动汽车电机的控制,尤其涉及一种电动汽车电机光滑非线性分数阶滑模控制方法及系统。
背景技术:
1、在实际的应用场景中,电动汽车的电机驱动系统具有频繁启动、内部参数变化较大和外部负载突变等特点,这是对电动汽车电机控制的一个较大的挑战。永磁同步电机本身由于能耗低、运行可靠和结构简单等诸多独特的优点,已经在电动汽车中得到了广泛的应用。从控制理论研究的角度来看,由于永磁同步电机动态模型具有多元特征、强耦合和非线性等特点,目前所采用的传统的比例-积分-微分控制策略难以满足控制要求。分数阶滑模方法结合了分数阶运算和滑模控制策略的优点,具有稳态误差小、动态响应快和鲁棒性强等特点。由于这些优点,它已经被应用到电动汽车电机控制中。而已有的分数阶滑模控制中的线性叠加会导致快速与超调的矛盾,还存在信号处理简单且粗糙的缺点,难以满足高质量的控制要求。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。因此,本发明提供了一种电动汽车电机光滑非线性分数阶滑模控制方法,来解决已有的分数阶滑模控制中的线性叠加会导致快速与超调的矛盾,还存在信号处理简单且粗糙的缺点,难以满足电动汽车电机的高质量控制要求。
3、为解决上述技术问题,本发明提供如下技术方案:
4、第一方面,本发明提供了一种电动汽车电机光滑非线性分数阶滑模控制方法,包括:
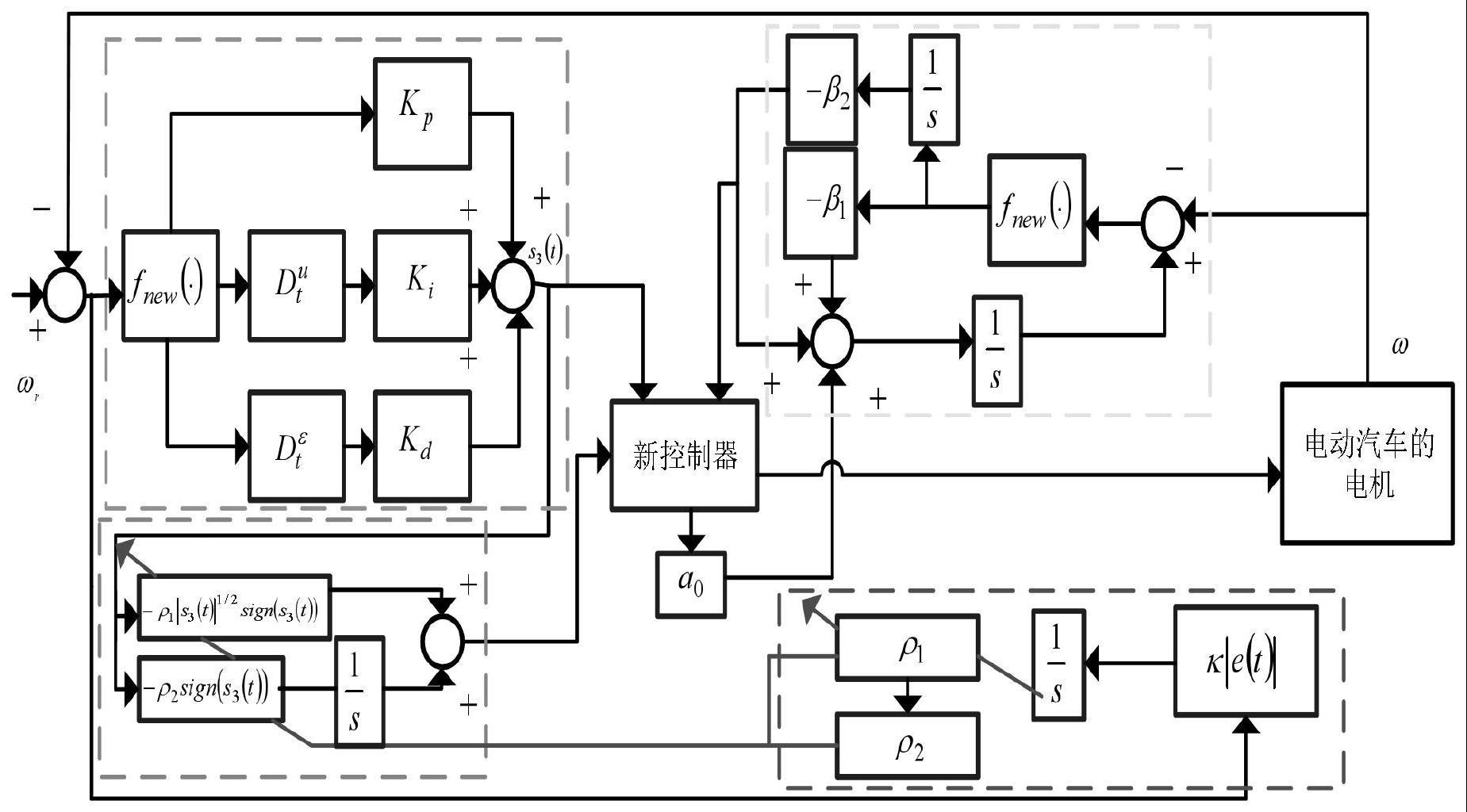
5、基于光滑非线性函数,构建新型光滑非线性分数阶滑模面;
6、基于新型自适应律,构建新型自适应超螺旋趋近律;
7、通过所述新型自适应超螺旋趋近律和所述新型光滑非线性分数阶滑模面,得到电动汽车电机光滑非线性分数阶滑模控制方法。
8、作为本发明所述的电动汽车电机光滑非线性分数阶滑模控制方法的一种优选方案,其中:所述基于光滑非线性函数构建新型光滑非线性分数阶滑模面和基于新型自适应律构建新型自适应超螺旋趋近律,包括:采用结合分数阶微积分运算和光滑非线性函数进行新型光滑非线性分数阶滑模面的构建;采用自适应参数进行新型自适应超螺旋趋近律的构建。
9、作为本发明所述的电动汽车电机光滑非线性分数阶滑模控制方法的一种优选方案,其中:所述新型光滑非线性分数阶滑模面,包括:
10、新型光滑非线性分数阶滑模面的表达式为:
11、
12、其中,s3(t)为新型光滑非线性分数阶滑模面,kp>0,ki>0,kd>0,0<u=-ε<1,和分别代表分数阶微分和分数阶积分运算符号,e(t)是电机实际转速与设定转速的误差,
13、所述新型自适应超螺旋趋近律,包括:
14、新型自适应超螺旋趋近律的表达式为:
15、
16、其中,ρmin和ρmax分别代表自适应参数ρ1的最小值和最大值,0<η1<η2,和κ是通过仿真或者实验给定的正参数。
17、作为本发明所述的电动汽车电机光滑非线性分数阶滑模控制方法的一种优选方案,其中:通过所述自适应超螺旋近律和所述光滑非线性分数阶滑模面,得到新型电动汽车电机的控制方法,包括:
18、对所述光滑非线性分数阶滑模面取微分并结合所述的自适应超螺旋趋近律进行运算;
19、结合电动汽车电机的动态模型和非线性扩张状态观测器,得到电动汽车电机光滑非线性分数阶滑模控制方法。
20、作为本发明所述的电动汽车电机光滑非线性分数阶滑模控制方法的一种优选方案,其中:所述电动汽车驱动系统,包括:所采用的驱动电机为表贴式永磁同步电机。
21、作为本发明所述的电动汽车电机光滑非线性分数阶滑模控制方法的一种优选方案,其中:采用的电动汽车电机的动态模型,包括:
22、动态模型的表达式为:
23、
24、其中,a=a0+δa,b=b0+δb;a0,b0为理想情况下的参数;δa,δb分别代表参数a和b的不确定性;由于电机的内部参数会随时间和环境而变化,所以用δ标用来表示时变参数,ω为电机实际转速,iq为电机q轴的电流,d为干扰项。
25、作为本发明所述的电动汽车电机光滑非线性分数阶滑模控制方法的一种优选方案,其中:采用的估计方法为采用一种改进的非线性扩张状态观测器,包括:
26、该观测器的表达式为:
27、
28、其中,β1和β2均为正参数,z22为总扰动的估计值,z21为电机转速的估计值。
29、作为本发明所述的电动汽车电机光滑非线性分数阶滑模控制方法的一种优选方案,其中:利用所述电动汽车电机的动态模型设计光滑非线性分数阶滑模控制方法,包括:
30、光滑非线性分数阶滑模控制方法的表达式为:
31、
32、其中,ωr为电机转速的给定值。
33、第二方面,本发明提供了一种电动汽车电机的光滑非线性分数阶滑模控制系统,其包括:
34、滑模面构建模块,用于构建新型光滑非线性分数阶滑模面;
35、控制输入计算模块,用于根据当前系统的状态和构建的滑模面,计算出控制器的控制输入;
36、非线性系统建模模块,用于建立非线性系统的电动汽车电机动态模型;
37、噪声滤波模块,用于对系统包含的测量数据进行滤波,去除噪声和干扰。
38、第三方面,本发明提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中:所述处理器执行所述计算机程序时实现上述方法的任一步骤。
39、第四方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,其中:所述计算机程序被处理器执行时实现上述方法的任一步骤。
40、与现有技术相比,发明有益效果为:首先,结合一种光滑可导的非线性函数设计了一种新的光滑非线性分数阶滑模面,该滑模面比现有的分数阶滑模面能有效地提供更快的有限时间收敛和更强的抗饱和能力;其次,为了抑制电动汽车电机运转时的颤振现象,以及进一步提高该电机运转时的鲁棒性;本发明设计了一种新的自适应超螺旋趋近律,提出了采用非线性扩展状态观测器来估计出电动汽车电机的外部扰动和不确定性;最后,结合非线性扩展状态观测器、新型的光滑非线性分数阶滑模面和新型自适应超螺旋趋近律,发明出一种电动汽车电机光滑非线性分数阶滑模控制方法。
技术特征:
1.一种电动汽车电机光滑非线性分数阶滑模控制方法,其特征在于,包括:
2.如权利要求1所述的电动汽车电机光滑非线性分数阶滑模控制方法,其特征在于,所述基于光滑非线性函数构建新型光滑非线性分数阶滑模面和基于新型自适律构建新型自适应超螺旋趋近律,包括:
3.如权利要求2所述的电动汽车电机光滑非线性分数阶滑模控制方法,其特征在于,所述新型光滑非线性分数阶滑模面和所述新型自适应超螺旋趋近律,包括:
4.如权利要求3所述的电动汽车电机光滑非线性分数阶滑模控制方法,其特征在于,通过所述新型自适应超螺旋近律和所述新型光滑非线性分数阶滑模面,新型电动汽车电机光滑非线性分数阶滑模控制方法,包括:
5.如权利要求4所述的电动汽车电机光滑非线性分数阶滑模控制方法,其特征在于,采用电动汽车电机的的动态模型,包括:
6.如权利要求3或5所述的电动汽车电机光滑非线性分数阶滑模控制方法,其特征在于,所述非线性扩张状态观测器,包括:
7.如权利要求6所述的电动汽车电机光滑非线性分数阶滑模控制方法,其特征在于,利用所述电动汽车电机的的动态模型设计光滑非线性分数阶滑模控制方法,包括:
8.一种电动汽车电机的光滑非线性分数阶滑模控制系统,基于权利要求1~7任一所述的电动汽车电机光滑非线性分数阶滑模控制方法,其特征在于,包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于:所述处理器执行所述计算机程序时实现权利要求1~7任一所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现权利要求1~7任一所述方法的步骤。
技术总结
本发明公开了一种电动汽车电机光滑非线性分数阶滑模控制方法及系统包括,在已有分数阶滑模面和已有非线性分数阶滑模面的基础上,结合光滑非线性函数构建新型的光滑非线性分数阶滑模面;以新型自适应律基础结合超螺旋趋近律,设计新型自适应超螺旋趋近律;以新型自适应超螺旋趋近律和新型光滑非线性分数阶滑模面和非线性扩张状态观测器为基础,基于电动汽车电机的动态模型,得到一种电动汽车电机光滑非线性分数阶滑模控制方法;本发明通过提供的一种电动汽车电机光滑非线性分数阶滑模控制方法,可以有效的提升电动汽车驱动系统稳态性能和动态性能,同时能够提高电动汽车电机的鲁棒性。
技术研发人员:高鹏,汪谦,潘慧慧,吕筱东,吴卫兵,朱云国,周松林
受保护的技术使用者:铜陵学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!