一种机器人倾倒保护方法、装置、电子设备及存储介质与流程
本技术涉及移动机器人,特别是涉及一种机器人倾倒保护方法、装置、电子设备及存储介质。
背景技术:
1、无人叉车、料箱搬运机器人等机器人一般高达数米,尺寸重量大、重心高,一旦意外撞击或剐蹭到货物、货架等物体,若不立刻判别出危险并控制机器人采取保护措施,极易造成倾倒,后果不堪设想。
2、因此,如何对机器人进行倾倒保护是亟需解决的技术问题。
技术实现思路
1、本技术实施例的目的在于提供一种机器人倾倒保护方法、装置、电子设备及存储介质,以实现对机器人进行倾倒保护。具体技术方案如下:
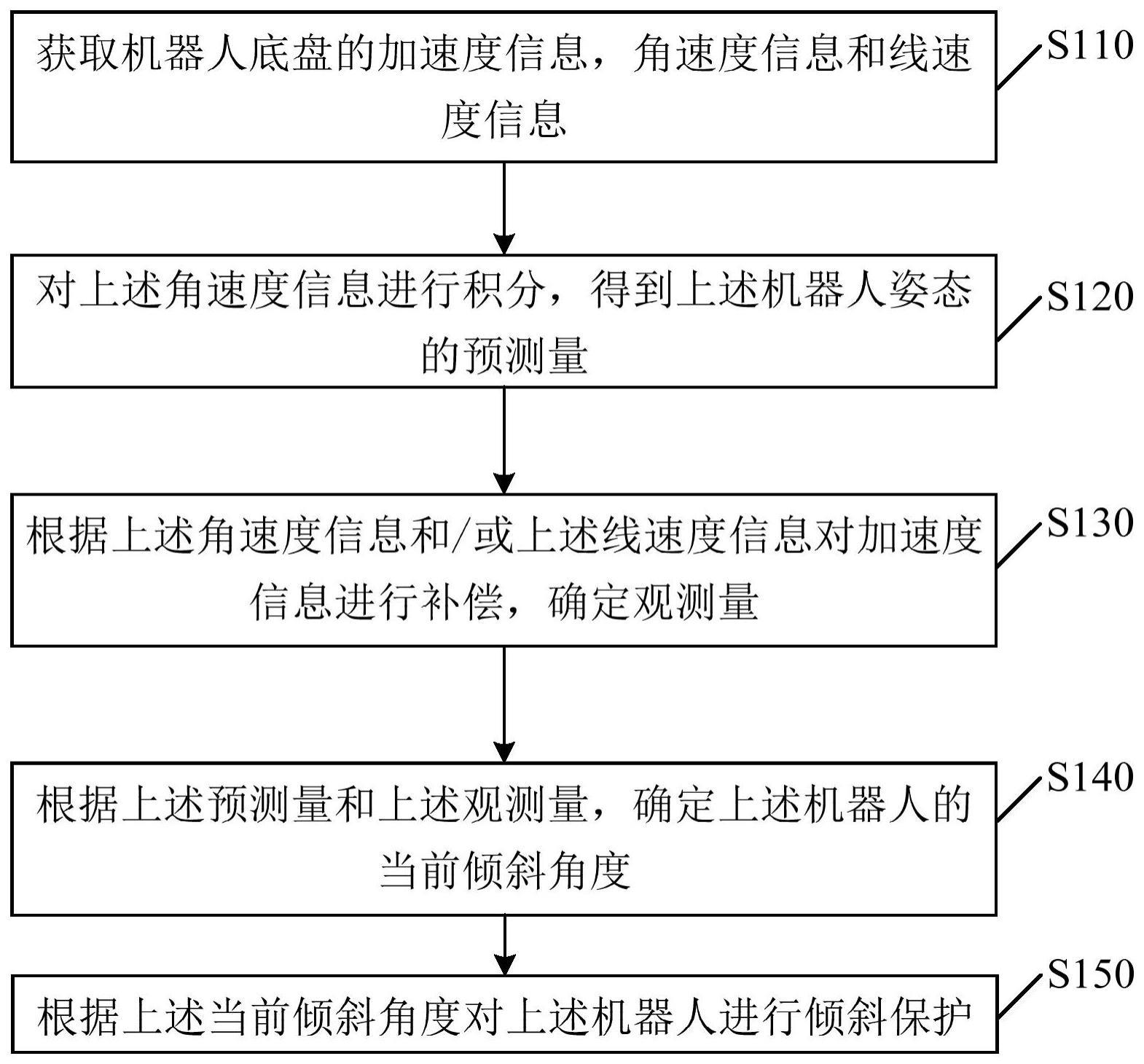
2、本技术实施例提供了一种机器人倾倒保护方法,所述方法包括:
3、获取机器人底盘的角速度信息和线速度信息;
4、对所述角速度信息进行积分,得到所述机器人姿态的预测量;
5、根据所述角速度信息和/或所述线速度信息,确定观测量;
6、根据所述预测量和所述观测量,确定所述机器人的当前倾斜角度;
7、根据所述当前倾斜角度对所述机器人进行倾斜保护。
8、一种可能的实施例中,所述方法还包括:获取机器人底盘的加速度信息;
9、所述根据所述角速度信息和/或所述线速度信息,确定观测量,包括:
10、利用所述角速度信息,对所述加速度信息进行因旋转而产生的加速度补偿,得到重力方向的观测量。
11、一种可能的实施例中,所述根据所述角速度信息和/或所述线速度信息,确定观测量,包括:
12、利用所述线速度信息直接作为线速度的观测量。
13、一种可能的实施例中,所述方法还包括:获取机器人底盘的加速度信息;
14、所述根据所述角速度信息和/或所述线速度信息,确定观测量,包括:
15、利用所述角速度信息,对所述加速度信息进行因旋转而产生的加速度补偿,得到一次补偿后的加速度信息;
16、根据所述线速度信息,差分计算得到差分加速度;
17、利用所述差分加速度,对所述一次补偿后的加速度信息进行因加速度计运动而产生的额外加速度的补偿,得到重力方向的观测量。
18、一种可能的实施例中,所述根据所述预测量与观测量,确定所述机器人的当前倾斜角度,包括:
19、将所述观测量作为观测修正,利用卡尔曼滤波算法对所述机器人姿态的预测量进行修正,得到所述机器人的当前倾斜角度。
20、一种可能的实施例中,所述根据所述当前倾斜角度对所述机器人进行倾斜保护,包括:
21、在所述当前倾斜角度大于预设倾斜角度阈值的情况下,控制所述机器人停止运动;
22、和/或
23、根据所述当前倾斜角度,计算得到所述机器人的目标线速度或倾斜抵消加速度,并按照所述目标线速度或所述倾斜抵消加速度控制所述机器人进行行进。
24、一种可能的实施例中,所述根据所述当前倾斜角度,计算得到所述机器人的目标线速度,包括:
25、根据所述当前倾斜角度的大小和预设行进速度计算得到目标线速度,其中,所述目标线速度与所述倾斜角度负相关。
26、一种可能的实施例中,所述根据所述当前倾斜角度,计算得到所述机器人的倾斜抵消加速度,包括:
27、根据所述角速度信息、所述线速度信息及所述当前倾斜角度,计算得到倾斜抵消加速度。
28、一种可能的实施例中,所述角速度信息、所述线速度信息及所述当前倾斜角度,计算得到倾斜抵消加速度,包括:
29、根据以下公式计算倾斜抵消加速度:
30、
31、其中,kp,ki,kd为控制器参数,e=θ·vy,θ为当前倾斜角度,vy为线速度信息在y轴的分量。
32、本技术实施例还提供了一种机器人倾倒保护装置,所述装置包括:
33、获取模块,用于获取机器人底盘的角速度信息和线速度信息;
34、预测模块,用于根据所述角速度信息进行积分,得到所述机器人姿态的预测量;
35、观测模块,用于根据所述角速度信息和/或所述线速度信息,确定观测量;
36、确定模块,用于根据所述预测量与所述观测量,确定所述机器人的当前倾斜角度;
37、保护模块,用于根据所述当前倾斜角度对所述机器人进行倾斜保护。
38、一种可能的实施例中,所述装置还包括:加速度信息获取模块,用于获取机器人底盘的加速度信息;
39、所述观测模块具体用于:
40、利用所述角速度信息,对所述加速度信息进行因旋转而产生的加速度补偿,得到重力方向的观测量。
41、一种可能的实施例中,所述观测模块具体用于:
42、利用所述线速度信息直接作为线速度的观测量。
43、一种可能的实施例中,所述装置还包括:加速度信息获取模块,用于获取机器人底盘的加速度信息;
44、所述观测模块具体用于:
45、利用所述角速度信息,对所述加速度信息进行因旋转而产生的加速度补偿,得到一次补偿后的加速度信息;
46、根据所述线速度信息,差分计算得到差分加速度;
47、利用所述差分加速度,对所述一次补偿后的加速度信息进行因加速度计运动而产生的额外加速度的补偿,得到重力方向的观测量。
48、一种可能的实施例中,所述确定模块具体用于:
49、将所述观测量作为观测修正,利用卡尔曼滤波算法对所述机器人的预测量进行修正,得到所述机器人的当前倾斜角度。
50、一种可能的实施例中,所述保护模块具体用于:
51、在所述当前倾斜角度大于预设倾斜角度阈值的情况下,控制所述机器人停止运动;和/或
52、根据所述当前倾斜角度,计算得到所述机器人的目标线速度或倾斜抵消加速度,并按照所述目标线速度或所述倾斜抵消加速度控制所述机器人进行行进。
53、一种可能的实施例中,所述保护模块具体用于:
54、根据所述当前倾斜角度的大小和预设行进速度计算得到目标线速度,其中,所述目标线速度与所述倾斜角度负相关。
55、一种可能的实施例中,所述保护模块具体用于:
56、根据所述角速度信息、所述线速度信息及所述当前倾斜角度,计算得到倾斜抵消加速度。
57、一种可能的实施例中,所述保护模块具体用于:
58、根据以下公式计算倾斜抵消加速度:
59、
60、其中,kp,ki,kd为控制器参数,e=θ·vy,θ为当前倾斜角度,vy为线速度信息在y轴的分量。
61、本技术实施例还提供了一种电子设备,包括:处理器、存储器;
62、存储器,用于存放计算机程序;
63、处理器,用于执行存储器上所存放的程序时,实现上述任一所述的机器人倾倒保护方法。
64、本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述任一所述的机器人倾倒保护方法。
65、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述任一所述的机器人倾倒保护方法。
66、本技术实施例有益效果:
67、本技术实施例提供的机器人倾倒保护方法、装置、电子设备及存储介质,获取了角速度信息和/或线速度信息之后,先对角速度信息进行积分,得到机器人姿态的预测量,可以根据角速度信息和/或线速度信息确定观测量,然后基于预测量和观测量确定机器人的当前倾斜角度,最后根据当前倾斜角度对机器人进行倾斜保护。可以在不改变原有机器人硬件结构的情况下,仅利用机器人原有的硬件来获取角速度信息和线速度信息,便可以实现机器人的倾斜保护,能够在不增加硬件成本的前提下,实现机器人的倾斜保护。并且,利用角速度信息和/或线速度信息确定的观测量更加准确,提高了获取到的机器人倾斜角度的精度,在倾斜角度更准确的情况下,可以进一步增加倾倒保护策略的准确性,从而进一步提高机器人作业的安全性能。
68、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!