一种无人驾驶插秧机作业路径规划方法及系统与流程
本发明涉及智能控制,特别涉及一种无人驾驶插秧机作业路径规划方法及系统。
背景技术:
1、亚洲的主要粮食是水稻。“民以食为天”,水稻种植的好坏影响着粮食的安全。近几年,由于城市化发展加快,越来越多的人口涌进城市。而水稻插秧需要大量的人力,这导致了人力短缺。同时田间经常出现农田中的树木、水泥墩或者树根等障碍物,插秧机在自动运行中,需要对这些障碍物进行避让。
2、现有技术cn201911011775提供了一种水稻无人驾驶插秧机全路径规划方法,通过北斗/gps导航定位装置对作业区域进行分块规划路径进行插秧。现有技术cn201911011775缺乏根据农田中的障碍物对农田进行路径连续性规划。因此,亟需一种无人驾驶插秧机对障碍物避让的作业路径规划方法。
技术实现思路
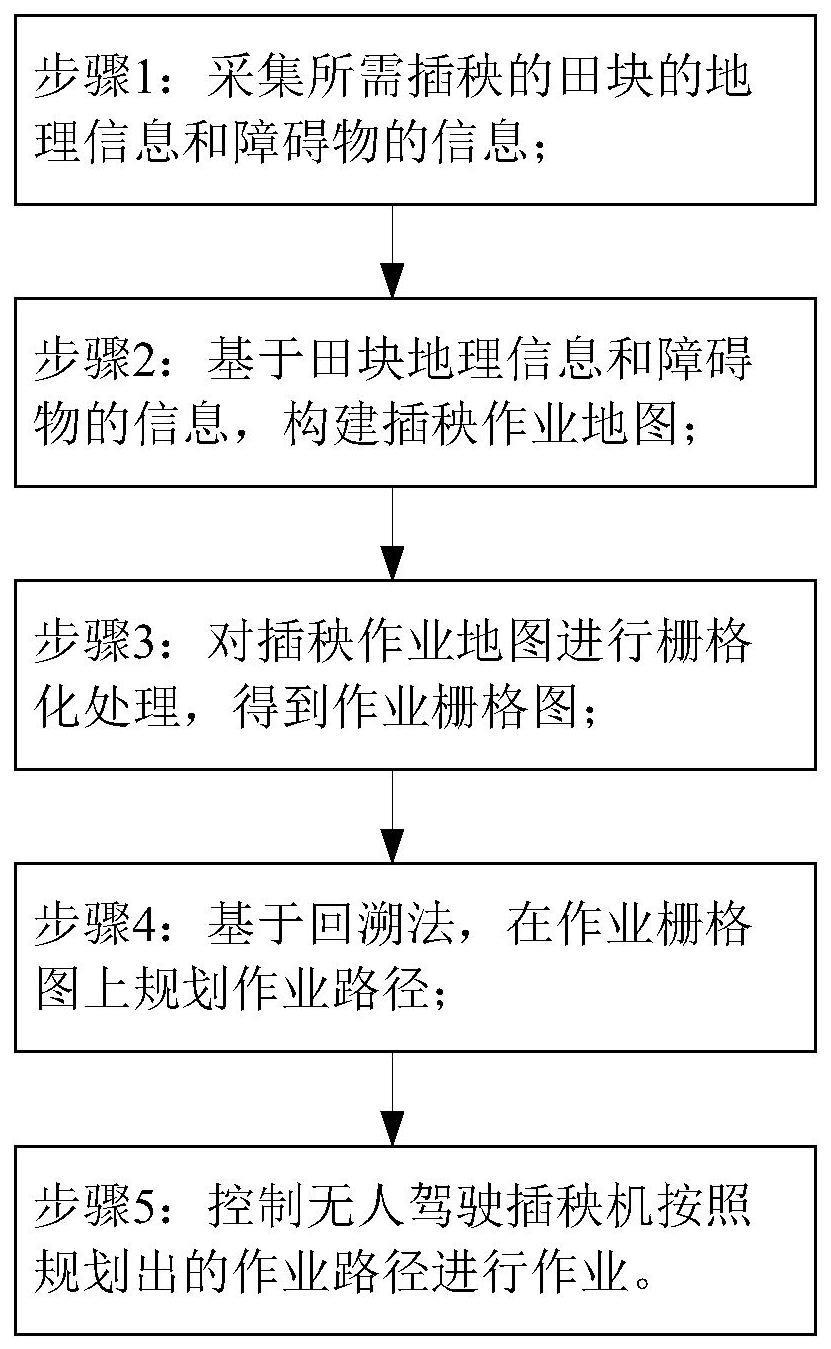
1、本发明实施例提供的一种无人驾驶插秧机作业路径规划方法,包括:
2、采集所需插秧的田块的地理信息和障碍物的信息;
3、基于田块地理信息和障碍物的信息,构建插秧作业地图;
4、对插秧作业地图进行栅格化处理,得到作业栅格图;
5、基于回溯法,在作业栅格图上规划作业路径;
6、控制无人驾驶插秧机按照规划出的作业路径进行作业。
7、优选地,基于回溯法,在作业栅格图上规划作业路径;包括:
8、基于田块地理信息和障碍物信息,在作业栅格图确定不可作业栅格和可作业栅格;
9、基于无人驾驶插秧机的起始位置,在作业栅格图上确定起始栅格;
10、将作业栅格图转化成第一矩阵;
11、基于第一矩阵和起始栅格,利用回溯法进行路径探索,得到第二矩阵;
12、将第二矩阵投射到作业栅格图上,并根据第二矩阵的数值大小规划出无人驾驶插秧机作业路径。
13、优选地,将作业栅格图转化成第一矩阵;包括:
14、将不可作业栅格对应的第一矩阵的矩阵元素标志为-1;
15、基于起始栅格对应的的第一矩阵的起始矩阵元素标志为1,将与起始矩阵元素相邻未标志的可作业栅格对应的第一矩阵元素标志为0;
16、将与标志为0的可作业栅格的相邻未标志的可作业栅格对应的第一矩阵元素标志为1;
17、将与标志为1的可作业栅格的相邻的未标志的可作业栅格对应的第一矩阵元素标志为0;
18、以此类推将作业栅格图中的所有栅格全部标志完成后,得到第一矩阵。
19、优选地,基于第一矩阵和起始栅格,进行路径探索,得到第二矩阵;包括:
20、统计第一矩阵中的标志为1的矩阵元素数量和标志为0的矩阵元素数量;
21、判断标志为1的矩阵元素数量与标志为0的矩阵元素数量是否相差为1;
22、若相差为1,则基于起始矩阵元素,进行路径方向上探索,得到第二矩阵;
23、若相差不为1,则先将第一矩阵拆分成标志为1的矩阵元素数量与标志为0的矩阵元素数量相差为1的调整第一矩阵和调整第一边缘矩阵,再基于调整第一矩阵和调整第一边缘矩阵分别进行路径方向上探索并合并,得到第二矩阵。
24、优选地,若相差为1,则基于起始矩阵元素,进行路径方向上探索,得到第二矩阵;包括:
25、以起始矩阵元素对应的第二矩阵的矩阵元素标志为1,并以起始矩阵元素为起点,在第一矩阵上可作业栅格的对应的矩阵元素向进行上下左右方向上的移动;
26、若移动到某一矩阵元素上无法移动,判断是否达到终点,若达到终点,则停止移动;若未达到终点,则回撤一步,继续向其他方向上移动,至到移动到终点;
27、计算所有可作业栅格的对应的矩阵元素的移动步数并加1,作为第二矩阵对应的某一矩阵元素数值,得到第二矩阵。
28、优选地,若相差不为1,则先将第一矩阵拆分成标志为1的矩阵元素数量与标志为0的矩阵元素数量相差为1的调整第一矩阵和调整第一边缘矩阵,再基于调整第一矩阵和调整第一边缘矩阵进行路径方向上探索,得到第二矩阵;包括:
29、对第一矩阵进行拆分成标志为1的矩阵元素数量与标志为0的矩阵元素数量相差为1的调整第一矩阵和调整第一边缘矩阵;
30、其中,调整第一边缘矩阵是包含设定的终点的一维矩阵,调整第一边缘矩阵不含有不可作业栅格的对应的矩阵元素;
31、其中,调整第一矩阵的调整终点以及调整第一边缘矩阵的起点和终点是第一矩阵的边缘矩阵元素;
32、对调整第一矩阵进行路径方向上探索,得到调整第一矩阵;
33、其中,包括:
34、以起始矩阵元素对应的调整第二矩阵的矩阵元素标志为1,并以起始矩阵元素为起点,在调整第一矩阵上可作业栅格的对应的矩阵元素向进行上下左右方向上的移动;
35、若移动到某一矩阵元素上无法移动,判断是否达到调整终点,若达到调整终点,则停止移动;若未达到调整终点,则回撤一步,继续向其他方向上移动,至到移动到设定的调整第一矩阵的调整终点;
36、计算所有可作业栅格的对应的矩阵元素的移动步数并加1,作为调整第二矩阵对应的某一矩阵元素数值,得到调整第二矩阵;
37、对调整第一边缘矩阵的起点重新标志为1,从调整第一边缘矩阵的起点到终点,按照顺序序列进行标志,得到调整边缘第二矩阵;
38、将调整第二矩阵与调整边缘第二矩阵进行合并,得到第二矩阵。
39、优选地,将第二矩阵对应到作业栅格图上,得到无人驾驶插秧机作业路径;包括:
40、以起始矩阵元素为起点,按照第二矩阵中的可作业栅格的对应的矩阵元素数值大小依次进行线段连接,得到第二矩阵规划路线;
41、将第二矩阵规划路线投射到作业栅格图,得到无人驾驶插秧机作业路径;
42、控制无人驾驶插秧机按照作业路径进行作业;
43、当无人驾驶插秧机作业完成某一区域,则某一区域对应的作业栅格图上的可作业栅格转化为不可作业栅格;
44、当作业栅格图上的可作业栅格全部转化为不可作业栅格,无人驾驶插秧机完成作业,驶出作业区域。
45、优选地,无人驾驶插秧机作业路径规划方法,还包括:
46、基于障碍物的类型,对障碍物进行清理并在作业栅格图中将不可作业栅格转化成可作业栅格;
47、其中,基于障碍物的类型,对障碍物进行清理并在作业栅格图中将不可作业栅格转化成可作业栅格;包括:
48、利用历史数据构建清障方案数据库;
49、其中,清障方案数据库包括障碍物的类型以及障碍物的类型对应的清障方案;
50、将采集到的障碍物的信息输入到清障方案数据库,检索出对应的清障方案;
51、基于清障方案,控制无人机对障碍物进行清理;
52、清理完毕后,将在作业栅格图中将不可作业栅格转化成可作业栅格。
53、优选地,无人驾驶插秧机作业路径规划方法,还包括:
54、对所需插秧的田块复查,判断是否完成全部插秧,若没有完成全部插秧,对未完成的区域进行补种;
55、其中,对所需插秧的田块复查,检测是否完成全部插秧,若没有完成全部插秧,对未完成的区域进行补种;包括:
56、检查作业栅格图中的可作业栅格是否全部变成不可作业栅格,若没有全部变成不可作业栅格,则识别为未完成全部插秧并获取可作业栅格对应的未完成插秧的田地坐标;
57、若全部变成不可作业栅格,则第二次采集田块的地理信息,检测是否完成全部插秧,若检测未完成全部插秧,则识别为未完成全部插秧并获取未完成插秧的田地坐标,否则,识别为完成全部插秧;
58、当识别为未完成全部插秧,控制机器人对未完成插秧的田地进行补种。
59、本发明还提供了一种无人驾驶插秧机作业路径规划系统,包括:
60、信息采集模块,用于采集所需插秧的田块的地理信息和障碍物的信息;
61、作业地图模块,用于基于田块地理信息和障碍物的信息,构建插秧作业地图;
62、作业栅格化模块,用于对插秧作业地图进行栅格化处理,得到作业栅格图;
63、路径规划模块,用于基于回溯法,在作业栅格图上规划作业路径;
64、控制作业模块,用于控制无人驾驶插秧机按照规划出的作业路径进行作业。
65、本发明有益效果:
66、本发明通过回溯法在作业栅格图上规划作业路径,对障碍物进行自动避障,同时实现插秧作业的连续性,防止了插秧机在田块上重复作业,减少了无人驾驶插秧机对秧田中的作物破坏。
67、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
68、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!