一种变结构水下机器人游走模式运动控制方法和系统
本发明属于水下机器人控制,具体涉及一种变结构水下机器人作业模式切换控制方法。
背景技术:
1、随着社会、经济发展的需要,水下资源和空间的探索利用具备高度的战略价值。各种海洋工程设备、船舶桥梁设施、水库大坝工程、港口码头建筑都得到了飞速的发展和应用。水下设备和建筑物在长期服役过程中,水流、波浪、水生物等外部因素,以及设计、选材、应力等自身因素,都可能对水下设备、工程的表面形成裂纹、腐蚀等破坏,严重影响其使用寿命以及人员安全。
2、对于水下建筑、工程的基础检修,传统的方法是由专业潜水员携带一系列用于探测和维修的设备进行下潜作业。然而,水下环境复杂且危险,潜水员作业时间和作业面积相对受限,并且难以保证人员安全。
3、近年来水下机器人的广泛应用,逐渐取代了危险环境中的人工作业。利用水下机器人的建筑、工程检修作业目前主要采用两种方式,一种是通过遥控无人潜水器进行近壁面作业,但是该方式无法保证水下机器人长时间在动态水流环境下保持稳定悬停,并且存在操作不当发生碰撞的风险。另一种是使用水下爬壁机器人直接贴附于壁面作业,但是建筑物表面情况的差异,不同吸附机理在壁面上表现参差不齐,严重情况下极易导致移动性能差、吸附力不可靠。此外,水下机器人壁面的越障问题也使得自身结构及系统设计复杂度急剧上升。
4、因此,需要针对水下机器人设计具有更加有效的水下作业方式以及作业方式间的切换,既能保证水下机器人安全作业又能符合工程需求。
技术实现思路
1、本发明所要解决的技术问题是针对上述现有技术的不足,提供一种变结构水下机器人游走模式运动控制方法和系统,本发明变结构水下机器人同时具备游动和爬壁两种工作模式,可在接近水下结构物时切换姿态吸附至壁面进行爬壁的工作模式,若遇到难以翻越的障碍或完成工作点任务直接从壁面脱离切换至游动状态,巡游至下一个工作点重新吸附后进行爬壁作业。同时,本发明基于模糊生物启发反步滑模级联控制的大角度侧翻模式切换控制,可更加有效的实现作业方式间的切换。
2、为实现上述技术目的,本发明采取的技术方案为:
3、一种变结构水下机器人游走模式运动控制方法,所述变结构水下机器人同时具备游动作业和爬壁作业两种工作模式,所述变结构水下机器人游走模式运动控制方法,包括:
4、根据水下机器人动力学模型得到大地坐标系下的横垂面控制模型;
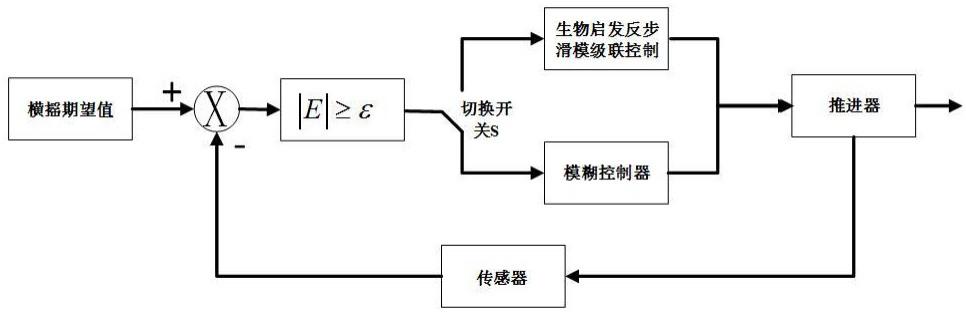
5、基于横垂面控制模型,水下机器人进行游走作业和爬行作业模式切换:
6、当翻转角与作业壁面平行角的偏差大于等于阈值时,采用模糊控制器对水下机器人推进器进行转速控制;
7、当翻转角与作业壁面平行角的偏差小于阈值时,采用生物启发反步滑模级联控制器对水下机器人进行位姿控制;
8、在达到与壁面近似平行的期望角度时,水下机器人推进器对机身深度方向施加推力,直至航行器吸附与壁面,实现爬壁动作。
9、为优化上述技术方案,采取的具体措施还包括:
10、上述的水下机器人采用开架型结构,且所有控制系统和锂电池较均集中放置在圆柱形腔体中,腔体作为整个水下机器人系统的元中心为航行器在水下提供多自由度游动的稳定性。
11、上述的水下机器人水平和垂直共配置8 个推进器,且水平布局的4 个推进器沿水平轴线呈45°角倾斜放置,满足前后左右平移及转向需求;垂直分布的4 个推进器产生垂直方向运动推力,其布局按照反桨-正桨交替方式进行,抵消内部螺旋桨叶旋转过程中产生的作用扭矩,通过8 个推进器的配合使用实现水下机器人在水中六个自由度的游动。
12、上述的水下机器人采用非接触式吸附模式进行爬壁作业;
13、爬壁作业中利用推进器外加吸盘外壳构成伯努利吸盘以实现吸附功能:
14、根据水下伯努利吸盘的吸附特性,在近壁面处,当吸盘底部与壁面形成设定距离内的间隙时当作非接触式吸盘使用;
15、爬壁作业中采用万向被动轮配合推进器驱动的方式实现壁面移动;
16、在航行器顶部两侧各安装2 个万向被动轮,在爬壁作业中,通过万向被动轮提供的间隙,使得四个伯努利吸盘能够提供稳定的吸附力,通过调节水平安装的4 个推进器的输出力,使得航行器能够在壁面上完成三自由度的运动。
17、上述的水下机器人动力学模型表示为公式(1)-(2):
18、 (1)
19、 (2)
20、其中,表示惯性矩阵,表示水下机器人在机体坐标系下的线速度,表示水下机器人在机体坐标系下的线加速度,表示粘性水动力对机体产生的阻尼力矩阵,表示由重力和浮力所组成的回复力及力矩矩阵,表示由推进器产生的推力,表示在大地坐标系下机器人的位姿,表示在大地坐标系下机器人的速度,表示大地坐标系和机体坐标系转换矩阵; (3)
21、其中,表示水下机器人受到的重力,表示水下机器人受到的浮力,表示水下机器人在大地坐标系下的横摇角度,是水下机器人在机体坐标系中z 轴坐标;
22、 (4)
23、其中,表示水下机器人运动时各个推进器的作用力,表示水平推进分布的角度,表示推进器到机器人中心位置的力臂值。
24、上述的将水下机器人动力学模型转化到大地坐标系,得到大地坐标系下的横垂面控制模型为:
25、 (5)
26、其中,*表示为大地坐标系的各种参量,即表示大地坐标系下的惯性矩阵,表示大地坐标系下的粘性水动力对机体产生的阻尼力矩阵,表示大地坐标系下重力和浮力所组成的回复力及力矩矩阵,表示大地坐标系下推进器产生的推力;
27、 (6)
28、 (7)
29、在大地坐标系下,假定仅对水下机器人横摇角进行控制,且此时刻沿y轴和z轴的速度(即,)和加速度(即,)均为 0,即,在z轴方向上存在恒定的外力作用,根据式(7)可知为了保证模式切换时机体稳定,需要在水下机器人侧翻时使用垂直和水平推进器同时进行补偿,且随角度增大垂直推进器作用减小,水平推进器作用增强。
30、上述的模糊控制器以当前翻转角与作业壁面平行角的偏差,即横摇角的偏差 e以及偏差变化量 ec作为输入量,推进器转速 y为输出量,其模糊控制策略为:
31、(1)将横摇角的偏差 e及偏差变化量 ec划分为模糊子集;
32、将推进器转速 y划分为模糊子集;
33、选取 e, ec和 y的论域;
34、输入量与输出量均采用三角形隶属度函数;
35、(2)基于(1)得到相应的模糊控制规则,采用max-min的合成运算法则,计算模糊控制规则蕴含的模糊关系;
36、(3)通过遍历 e和 ec所有的论域对模糊值进行选取,并计算模糊输出值:
37、 (9)
38、采用重心法进行解模糊:
39、 (10)
40、式中:为模糊控制器输出量解模糊后的精确值,为模糊控制量论域内的值,为的隶属度值。
41、上述的生物启发反步滑模级联控制器的控制策略为:
42、设定是期望的位姿,为实际的位姿,水下机器人位姿的误差为:
43、 (11)
44、相应的滑模面与控制律设计过程为:
45、滑模面设计为: (12)
46、其中,s是误差滑模面,表示水下机器人误差的导数,表示一个正常数;对等式(12)求导,得到:
47、 (13)
48、其中,表示误差滑模面的导数,表示水下机器人误差的二阶导数,表示在大地坐标系下机器人的期望速度,表示在大地坐标系下机器人的实际的速度;
49、当水下机器人系统运行于滑模面的时候,等式(13)等于零,即:
50、 (14)
51、将大地坐标系下的横垂面控制模型代入等式(14),得到:
52、 (15)
53、将水下机器人的动力学方程等效为估计动力学项与未知动力学项,即:
54、 (16)
55、其中:,,,,是,,的估计项,,,是,,的未知项,是未知的扰动量;
56、因此等价控制律可以推导为:
57、 (17)
58、 (18)
59、其中,是正常值系数;
60、传统的滑模控制可以设计为:
61、 (19)
62、其中,k是控制器正常值系数;
63、为了消除由不连续切换项带来的抖振问题,构造自适应控制项加入到控制律中去取代切换项:
64、 (20)
65、其中,是用来估计未知量的自适应变化项,k自适应控制器的正常值系数,未知的不确定量满足以下更新率:
66、 (21)
67、其中,自适应控制器的正常值系数;
68、则完整的控制律可以表述为:
69、 (22)。
70、上述的推进器的模型为:
71、 (23)
72、其中,是标准化的pwm控制值,是推进器输出的力。
73、一种变结构水下机器人游走模式运动控制系统,所述变结构水下机器人同时具备游动作业和爬壁作业两种工作模式,所述变结构水下机器人游走模式运动控制系统,包括:模糊控制器、生物启发反步滑模级联控制器和位姿传感器;
74、所述位姿传感器采集水下机器人位姿信息,并得到翻转角与作业壁面平行角的偏差;
75、所述模糊控制器、生物启发反步滑模级联控制器基于横垂面控制模型,对水下机器人进行游走作业和爬行作业模式切换:
76、模糊控制器在翻转角与作业壁面平行角的偏差大于等于阈值时,对水下机器人推进器进行转速控制;
77、生物启发反步滑模级联控制器在翻转角与作业壁面平行角的偏差小于阈值时,对水下机器人进行位姿控制;
78、水下机器人推进器在达到与壁面近似平行的期望角度时,对机身深度方向施加推力,直至航行器吸附与壁面,实现爬壁动作。
79、本发明具有以下有益效果:
80、(1)本发明水下机器人的结构设计为高度开放的开架型结构,可满足水下机器人具有更高的机动性,并且所有控制系统和锂电池都被集中放置在圆柱形腔体中,腔体作为整个系统的元中心能够为航行器在水下提供多自由度游动的稳定性。推进器采用水平和垂直8 个推进器布局模式,水平布局的4 个推进器沿水平轴线呈45°角倾斜放置,满足前后左右平移及转向需求;垂直分布的4 个推进器产生垂直方向运动推力,其布局按照反桨-正桨交替方式进行,抵消内部螺旋桨叶旋转过程中产生的作用扭矩,通过8 个推进器的配合使用实现了水下机器人在水中六个自由度的游动。
81、(2)本发明采用万向被动轮配合推进器驱动的方式实现壁面移动,在爬壁模式下,通过轮子提供的间隙,使得四个伯努利吸盘能够提供稳定的吸附力;通过调节水平安装的4个推进器的输出力,使得航行器能够在壁面上完成三自由度的运动,充分利用了现有驱动设备,减少航行器额外负重及空间消耗,降低控制系统复杂度。
82、(3)作业模式切换控制:区别于其他需要在水下动态环境中进行姿态稳定才能进行作业的机器人,本发明针对的机器人只需在达到与作业壁面平行的角度附近之后快速推进吸附至壁面即可,因此对于姿态稳定控制没有过高的要求,在满足工程实际应用的前提下应尽可能降低控制系统开发难度,并允许一定范围内的偏差或震荡。本发明的方法确保水下机器人机体大角度侧翻时不会产生沿其余轴方向的不必要的运动。游走作业和爬行作业模式切换,该航行器采用大姿态角度侧翻策略,达到与壁面近似平行的期望角度之后,迅速吸附实现爬壁动作。本发明为了保证航行器的稳定需要在侧翻时使用垂直和水平推进器同时进行补偿,且随角度增大垂直推进器作用减小,水平推进器作用增强。同时,为了减少系统的非线性特性,将航行器的重力配置为和自身浮力基本相等。通过垂直、水平方向与翻转角度解耦合,使得深度方向所受静力近似为0。此时只需四个伯努利吸盘当作推进器使用,其中两个正转,两个反转,且推力相等即可实现大姿态角度侧翻。本发明对于四个伯努利吸盘的控制采用方法简单效果比较理想的模糊生物启发反步滑模级联控制方法。考虑到航行器进行大角度的侧翻动作,初始时刻机体的角度偏差较大,采用模糊算法对其翻转的角度进行初始调节。当翻转角度小于阈值时,采用生物启发反步滑模级联控制精准控制。考虑到反步算法速度跳变和由此引起的驱动饱和问题。因此,在反步滑模级联控制设计中用生物启发方式克服跳变。当控制器输出达到设定的饱和值时,利用生物启发模型的渐变、有界输出特性,克服了速度跳变。
- 还没有人留言评论。精彩留言会获得点赞!