通海系统自适应控制方法、装置、设备及可读存储介质与流程
本发明涉及船舶,尤其涉及一种通海系统自适应控制方法、装置、设备及可读存储介质。
背景技术:
1、船舶通海系统通过向冷凝器提供冷却水,使得冷凝器内的蒸汽液化,并将液化过程产生的热能转化为机械能,再将机械能转化为电能,是为全船供电的重要系统。但是,海洋环境却对船舶通海系统有着较大的影响,一旦外界环境发生变化,船舶通海系统的供电效果就会大幅降低。因此,亟需一种保证船舶通海系统的供电效果不会随着外界环境的变化而改变的技术方案。
技术实现思路
1、本发明的主要目的在于提供一种通海系统自适应控制方法、装置、设备及可读存储介质,旨在解决目前船舶通海系统的供电效果会因外界环境变化而降低的问题。
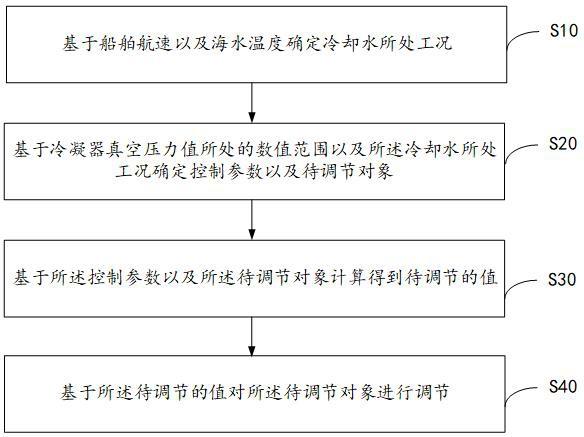
2、第一方面,本发明提供一种通海系统自适应控制方法,所述通海系统自适应控制方法包括:
3、基于船舶航速以及海水温度确定冷却水所处工况;
4、基于冷凝器真空压力值所处的数值范围以及所述冷却水所处工况确定控制参数以及待调节对象;
5、基于所述控制参数以及所述待调节对象计算得到待调节的值;
6、基于所述待调节的值对所述待调节对象进行调节。
7、可选的,所述基于船舶航速以及海水温度确定冷却水所处工况的步骤,包括:
8、基于船舶航速以及海水温度查询二维曲线图,确定冷却水处于第一工况、第二工况或第三工况,其中,所述二维曲线图基于船舶航速、海水温度以及冷却水所处工况之间的对应关系构建。
9、可选的,所述冷凝器真空压力值所处的数值范围为第一预设压力范围、第二预设压力范围或处于第三预设压力范围;
10、其中,当冷凝器真空压力值大于第一预设压力范围的下限值且小于第一预设压力范围的上限值,或等于第一预设压力范围的下限值,或等于第一预设压力范围的上限值时,冷凝器真空压力值所处的数值范围为第一预设压力范围;
11、当冷凝器真空压力值大于第一预设压力范围的上限值且冷凝器真空压力值与预设压力的上限值的差值绝对值小于或等于预设值时,冷凝器真空压力值所处的数值范围为第二预设压力范围;或,
12、当冷凝器真空压力值小于第一预设压力范围的下限值且冷凝器真空压力值与预设压力的下限值的差值绝对值小于或等于预设值时,冷凝器真空压力值所处的数值范围为第二预设压力范围;
13、当冷凝器真空压力值大于第一预设压力范围的上限值且冷凝器真空压力值与预设压力的上限值的差值绝对值大于预设值时,冷凝器真空压力值所处的数值范围为第三预设压力范围;或,
14、当冷凝器真空压力值小于第一预设压力范围的下限值且冷凝器真空压力值与预设压力的下限值的差值绝对值大于预设值时,冷凝器真空压力值所处的数值范围为第三预设压力范围。
15、可选的,所述基于冷凝器真空压力值所处的数值范围以及所述冷却水所处工况确定控制参数以及待调节对象的步骤,包括:
16、当所述冷却水处于第一工况且冷凝器真空压力值所处的数值范围为第一预设压力范围时,确定控制参数为预设开度,待调节对象为海水调节阀;
17、当所述冷却水处于第一工况且冷凝器真空压力值所处的数值范围为第二预设压力范围时,确定控制参数为第一工况对应的控制参数,待调节对象为抽气器进汽调节阀;
18、当所述冷却水处于第一工况且冷凝器真空压力值所处的数值范围为第三预设压力范围时,确定控制参数为第一工况对应的控制参数,待调节对象为海水调节阀;
19、当所述冷却水处于第二工况且冷凝器真空压力值所处的数值范围为第一预设压力范围时,确定控制参数为预设开度,待调节对象为海水调节阀;
20、当所述冷却水处于第二工况且冷凝器真空压力值所处的数值范围为第二预设压力范围时,确定控制参数为第二工况对应的控制参数,待调节对象为抽气器进汽调节阀;
21、当所述冷却水处于第二工况且冷凝器真空压力值所处的数值范围为第三预设压力范围时,确定控制参数为第二工况对应的控制参数,待调节对象为海水调节阀;
22、当所述冷却水处于第三工况且冷凝器真空压力值所处的数值范围为第一预设压力范围时,确定控制参数为预设转速,待调节对象为循环水泵;
23、当所述冷却水处于第三工况且冷凝器真空压力值所处的数值范围为第二预设压力范围时,确定控制参数为第三工况对应的控制参数,待调节对象为抽气器进汽调节阀;
24、当所述冷却水处于第三工况且冷凝器真空压力值所处的数值范围为第三预设压力范围时,确定控制参数为第三工况对应的控制参数,待调节对象为循环水泵。
25、可选的,所述基于所述控制参数以及所述待调节对象计算得到待调节的值的步骤,包括:
26、当控制参数为预设开度,待调节对象为海水调节阀时,计算预设开度加上海水调节阀当前开度的和,以所述和作为海水调节阀待调节的第一目标开度;
27、当控制参数为第一工况对应的控制参数,待调节对象为抽气器进汽调节阀时,基于第一工况对应的控制参数,通过增量式pid计算得到抽气器进汽调节阀待调节的第一目标开度;
28、当控制参数为第一工况对应的控制参数,待调节对象为海水调节阀时,基于第一工况对应的控制参数,通过增量式pid计算得到海水调节阀待调整的第二目标开度;
29、当控制参数为第二工况对应的控制参数,待调节对象为抽气器进汽调节阀时,基于第二工况对应的控制参数,通过增量式pid计算得到抽气器进汽调节阀待调整的第二目标开度;
30、当控制参数为第二工况对应的控制参数,待调节对象为海水调节阀时,基于第二工况对应的控制参数,通过增量式pid计算得到海水调节阀待调整的第三目标开度;
31、当控制参数为预设转速,待调节对象为循环水泵时,计算预设转速加上循环水泵当前转速的和,以所述和作为循环水泵待调节的第一目标转速;
32、当控制参数为第三工况对应的控制参数,待调节对象为抽气器进汽调节阀时,基于第三工况对应的控制参数,通过增量式pid计算得到抽气器进汽调节阀待调节的第三目标开度;
33、当控制参数为第三工况对应的控制参数,待调节对象为循环水泵时,基于第三工况对应的控制参数,通过增量式pid计算得到循环水泵待调节的第二目标转速。
34、可选的,所述海水调节阀待调节的第一目标开度、第二目标开度以及第三目标开度不小于第三预设值且不大于第四预设值;所述抽气器进汽调节阀待调节的第一目标开度、第二目标开度以及第三目标开度不小于第五预设值且不大于第六预设值;所述循环水泵待调节的第一目标转速和循环水泵待调节的第二目标转速不小于第七预设值且不大于第八预设值。
35、可选的,所述通海系统自适应控制方法,包括:
36、当无法获取船舶航速、海水温度和/或冷凝器真空压力值时,控制循环水泵转速、海水调节阀开度以及抽气器进汽调节阀开度保持不变。
37、第二方面,本发明还提供一种通海系统自适应控制装置,所述通海系统自适应控制装置包括:
38、第一确定模块,用于基于船舶航速以及海水温度确定冷却水所处工况;
39、第二确定模块,用于基于冷凝器真空压力值所处的数值范围以及所述冷却水所处工况确定控制参数以及待调节对象;
40、计算模块,用于基于所述控制参数以及所述待调节对象计算得到待调节的值;
41、调节模块,用于基于所述待调节的值对所述待调节对象进行调节。
42、第三方面,本发明还提供一种通海系统自适应控制设备,所述通海系统自适应控制设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的通海系统自适应控制程序,其中所述通海系统自适应控制程序被所述处理器执行时,实现如上所述的通海系统自适应控制方法的步骤。
43、第四方面,本发明还提供一种可读存储介质,所述可读存储介质上存储有通海系统自适应控制程序,其中所述通海系统自适应控制程序被处理器执行时,实现如上所述的通海系统自适应控制方法的步骤。
44、本发明中,基于船舶航速以及海水温度确定冷却水所处工况;基于冷凝器真空压力值所处的数值范围以及所述冷却水所处工况确定控制参数以及待调节对象;基于所述控制参数以及所述待调节对象计算得到待调节的值;基于所述待调节的值对所述待调节对象进行调节。通过本发明,当船舶航速、海水温度以及冷凝器真空压力值改变时,控制参数也会改变,使得待调节对象和待调节对象的待调节值也随之改变,从而保证不同环境下船舶通海系统供电效果的稳定性,解决了目前船舶通海系统的供电效果会因外界环境变化而降低的问题。
- 还没有人留言评论。精彩留言会获得点赞!