基于无人机的轨道机车智能导引方法及系统、电子设备与流程
本发明涉及轨道机车智能导引方案设计,具体涉及一种基于无人机的轨道机车智能导引方法及系统、电子设备。
背景技术:
1、随着国内无人驾驶汽车技术的成熟,而应用于轨道运输的轨道机车的智能驾驶及无人化驾驶技术相应短缺,一台轨道机车的运行常规需要8人三班驾驶运行,用人成本近百万/年,且实施智能无人化驾驶运行环境复杂程度远低于道路汽车,对于智能化驾驶及无人化驾驶以提高轨道机车的驾驶安全性及降低运行成本成为轨道运输行业迫在眉睫的需求。目前,传统轨道交通无人驾驶方案除车辆本身采用的地感线圈检测法、红外线检测法、微波检测法、超声波检测法、激光雷达检测法外,需要于轨道线路两侧架设大量传感器以辅助机车做智能驾驶或无人驾驶引导,导致投资过大,企业投资积极性偏低。
2、随着无人机的飞速发展,民用无人机已经逐渐普及,因此,急需提出一种车载伴飞无人机的智能导引系统,包括计算机视觉系统以及激光雷达等系统组成,能够对轨道及前进路线进行勘察,通过无线通讯技术与机车通讯,实时将勘察数据信息提供给机车微机端以为机车提供引导信息,在路况或天气不佳甚至是完全失去视野时,控制无人机自动伴飞,为机车能够实时避障、制动等动作提供实时的信息信号,在伴飞后可以通过自动导引回到机车,替代轨旁设置大量传感器的方案。
3、因此,现有技术还有待进一步发展。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种基于无人机的轨道机车智能导引方法及系统、电子设备,以解决现有技术存在的问题。
2、为达到上述技术目的,根据本发明的第一方面,本发明提供了一种基于无人机的轨道机车智能导引方法,所述方法包括:
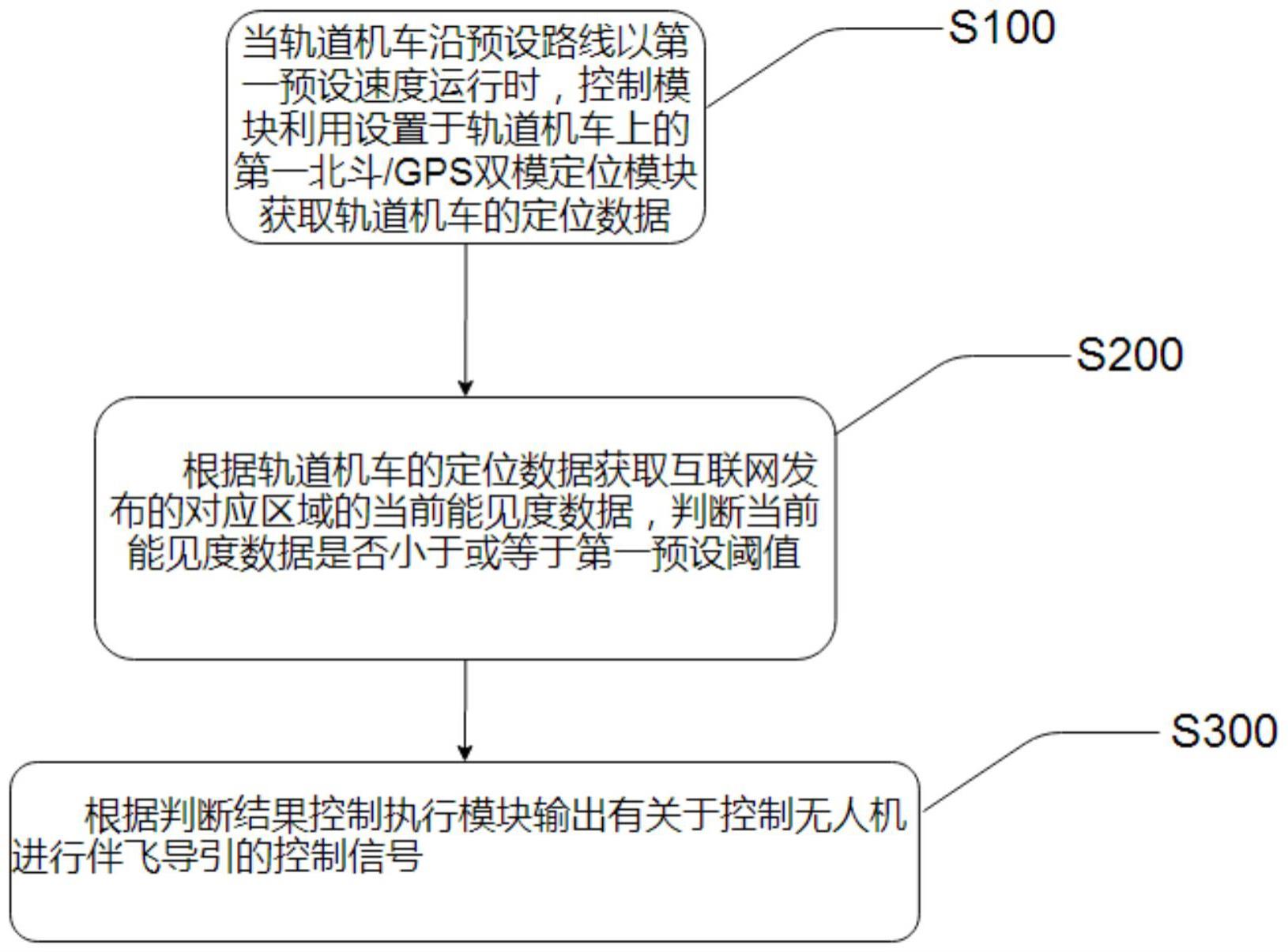
3、当轨道机车沿预设路线以第一预设速度运行时,控制模块利用设置于轨道机车上的第一北斗/gps双模定位模块获取轨道机车的定位数据,根据轨道机车的定位数据获取互联网发布的对应区域的当前能见度数据,判断当前能见度数据是否小于或等于第一预设阈值,并根据判断结果控制执行模块输出有关于控制无人机进行伴飞导引的控制信号。
4、具体地,所述方法还包括:
5、若当前能见度数据小于或等于第一预设阈值,控制模块控制执行模块输出有关于控制无人机进行伴飞导引的控制信号;
6、若无人机伴飞过程中,当前能见度数据恢复至大于第一预设阈值,控制模块控制执行模块输出有关于控制无人机回库的控制信号。
7、具体地,所述方法还包括:
8、控制模块利用设置于轨道机车上的摄像装置按第一预设周期采集轨道机车前方的当前帧路况照片,对当前帧路况照片进行灰度处理,提取灰度照片中灰度值位于第一预设区间的点并建立目标搜索框,判断目标搜索框的面积是否小于或等于第二预设阈值,并利用控制模块中的计数器根据判断结果进行异常帧计数,记录异常帧的连续出现次数,控制模块根据计数结果控制执行模块输出有关于控制无人机进行伴飞导引的控制信号。
9、具体地,所述方法还包括:
10、若目标搜索框的面积小于或等于第二预设阈值,则判断当前帧路况图片为异常帧,控制模块控制计数器加1,当异常帧的连续出现次数大于第三预设阈值,控制模块控制执行模块输出有关于控制无人机进行伴飞导引的控制信号;
11、若无人机伴飞的过程中,目标搜索框的面积恢复至大于第二预设阈值,则判断当前帧的路况图片为正常帧,控制模块控制计数器清零并加1,然后利用控制模块中的计数器根据判断结果进行正常帧计数,判断正常帧的连续出现次数,控制模块根据计数结果控制执行模块输出有关于控制无人机回库的控制信号。
12、具体地,所述方法还包括:
13、若正常帧的连续出现次数大于或等于第四预设阈值,控制模块控制执行模块输出有关于控制无人机回库的控制信号。
14、具体地,所述输出有关于控制无人机进行伴飞导引的控制信号包括:
15、控制模块利用设置于无人机中的第二北斗/gps双模定位模块获取无人机的定位数据,根据轨道机车的定位数据、无人机的定位数据以及预设路线计算无人机与轨道机车之间的实际距离数据,控制无人机以第二预设速度沿预设路线飞行,并判断实际距离数据是否大于或等于第五预设阈值,若是,控制模块控制无人机以第一预设速度沿预设路线继续飞行。
16、具体地,所述方法还包括:
17、在飞行过程中,控制模块利用设置于无人机下方的激光测距传感器测量无人机距离地面的高度,并控制无人机始终飞行于距地面第一预设高度,所述第一预设高度小于轨道机车的实际高度。
18、具体地,所述方法还包括:
19、在无人机飞行过程中,控制模块控制无人机按照第二预设周期向轨道机车发送协议数据帧,所述协议数据帧包括发送协议数据帧的时刻信息,判断是否与轨道机车完成授权,若完成授权,利用控制模块中的计时器开始记录授权持续时间,当无人机经过第二预设周期向轨道机车发送下一协议数据帧,若完成下一次授权,则控制计时器清零并记录授权持续时间,判断授权持续时间是否大于第六预设阈值,若是,控制模块控制执行模块输出有关于控制轨道机车紧急刹车的控制信号。
20、根据本发明的第二方面,提供一种基于无人机的轨道机车智能导引系统,包括:
21、采集模块,包括北斗/gps双模定位模块,用于采集轨道机车的定位数据;
22、控制模块,用于当轨道机车沿预设路线以第一预设速度运行时,利用设置于轨道机车上的第一北斗/gps双模定位模块获取轨道机车的定位数据,根据轨道机车的定位数据获取互联网发布的对应区域的当前能见度数据,判断当前能见度数据是否小于或等于第一预设阈值,并根据判断结果控制执行模块输出有关于控制无人机进行伴飞导引的控制信号;
23、执行模块,用于输出有关于控制无人机进行伴飞导引的控制信号。
24、根据本发明的第三方面,提供一种电子设备,包括:存储器;以及处理器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时实现上述的基于无人机的轨道机车智能导引方法。
25、有益效果:
26、本申请能够实现对轨道及前进路线进行勘察,通过无线通讯技术与机车通讯,实时将勘察数据信息提供给机车微机端以为机车提供引导信息,在路况或天气不佳时,机车可自动控制无人机自动伴飞,为机车能够实时避障、制动、减速等动作提供实时的信息信号,在伴飞后可以通过自动导引回到机车,替代轨旁设置大量传感器的方案,很大程度上降低了系统复杂度,且本申请能够在低能见度甚至完全失去视野时,通过控制无人机在机车前方伴飞,为轨道机车进行导引,很大程度上提高了机车在低能见度甚至完全失去视野时的运行安全度,且无需复杂算法建模,大大拓展了本发明的应用场景,很大程度上提高了本发明的可用性、可靠性、智能化程度和安全性。
技术特征:
1.一种基于无人机的轨道机车智能导引方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于无人机的轨道机车智能导引方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的基于无人机的轨道机车智能导引方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的基于无人机的轨道机车智能导引方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的基于无人机的轨道机车智能导引方法,其特征在于,所述方法还包括:
6.根据权利要求2或5所述的基于无人机的轨道机车智能导引方法,其特征在于,所述输出有关于控制无人机进行伴飞导引的控制信号包括:
7.根据权利要求6所述的基于无人机的轨道机车智能导引方法,其特征在于,所述方法还包括:
8.根据权利要求6所述的基于无人机的轨道机车智能导引方法,其特征在于,所述方法还包括:
9.一种车载无人机的轨道机车智能导引系统,其特征在于,包括:
10.一种电子设备,其特征在于,包括:
技术总结
本发明涉及轨道机车智能导引方案设计技术领域,提供了一种基于无人机的轨道机车智能导引方法及系统、电子设备,包括:当轨道机车沿预设路线以第一预设速度运行时,控制模块利用设置于轨道机车上的定位模块获取轨道机车的定位数据,根据轨道机车的定位数据获取互联网发布的对应区域的当前能见度数据,判断当前能见度数据是否小于或等于第一预设阈值,并根据判断结果控制执行模块输出有关于控制无人机进行伴飞导引的控制信号。本发明能在完全失去视野时,通过控制无人机在机车前方伴飞,为轨道机车导引,很大程度上提高了机车在完全失去视野时的运行安全度,且无需复杂算法建模,很大程度上提高了本发明的可用性、可靠性、智能化程度和安全性。
技术研发人员:王纯,高兆颖,邵波,王东,范建峰,王龙祥
受保护的技术使用者:山东华车能源科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!