一种基于高速状态转换模型的AGV队列的避撞控制方法
本发明属于自动控制领域,具体涉及一种基于高速状态转换模型的agv队列的避撞控制方法,以及对应的避撞控制器。
背景技术:
1、随着自动控制和人工智能的技术不断进步,各种无人车和无人机已经逐渐开始商业化应用,并取代人工完成部分传统的重复性劳动;例如无人机配送,和码头的agv货运小车等。在这些领域中,前沿的技术是各类多智能体集群控制技术。
2、队列系统是多智能体集群控制中的一个分支。队列系统脱胎于多智能体系统,核心技术是纵向跟随技术,其目的是根据不同的编队要求和环境约束,将具有类似行驶特征的零散车辆变成一个队列行驶,或将零散车辆编入已有队列中行驶,或在车辆驶离、驶入队列后重新编组为新的队列系统。在过去的30年里已经取得了较为丰硕的成果,其应用可见于高速公路系统、工业agv、智慧物流、军事领域。其关键技术包括车车通信(v2v)、路径规划、路径跟踪、稳定性控制等。
3、单个agv系统本身就是一个由多个子系统构成的复杂系统,由多个agv系统构成的agv队列系统则更加复杂。尽管当前在队列系统的纵向控制方面已经有很多研究成果,但对高速率避撞相关研究仍然较少。一方面,现有技术对非完整约束尤其是不等式约束条件下的队列系统建模研究较少,且在建模时未将避撞条件嵌入到模型中;因而通常无法实现有效的全局避撞。另一方面,现有的研究大部分仅对agv的动力学模型进行了简化处理,未能克服系统中存在的参数不确定性、外部干扰、通讯问题(如延迟、信息错误、数据丢失)等缺陷,这仍然能会对队列系统的稳定性造成巨大挑战;进而影响队列系统的控制精度和安全性。
技术实现思路
1、为了解决现有的agv队列系统的控制精度不足,稳定性差,无法实现全局避撞的问题,本发明提供一种基于高速状态转换模型的agv队列的避撞控制方法,以及对应的避撞控制器。
2、本发明采用以下技术方案实现:
3、一种基于高速状态转换模型的agv队列的避撞控制方法,该避撞控制方法包括如下步骤:
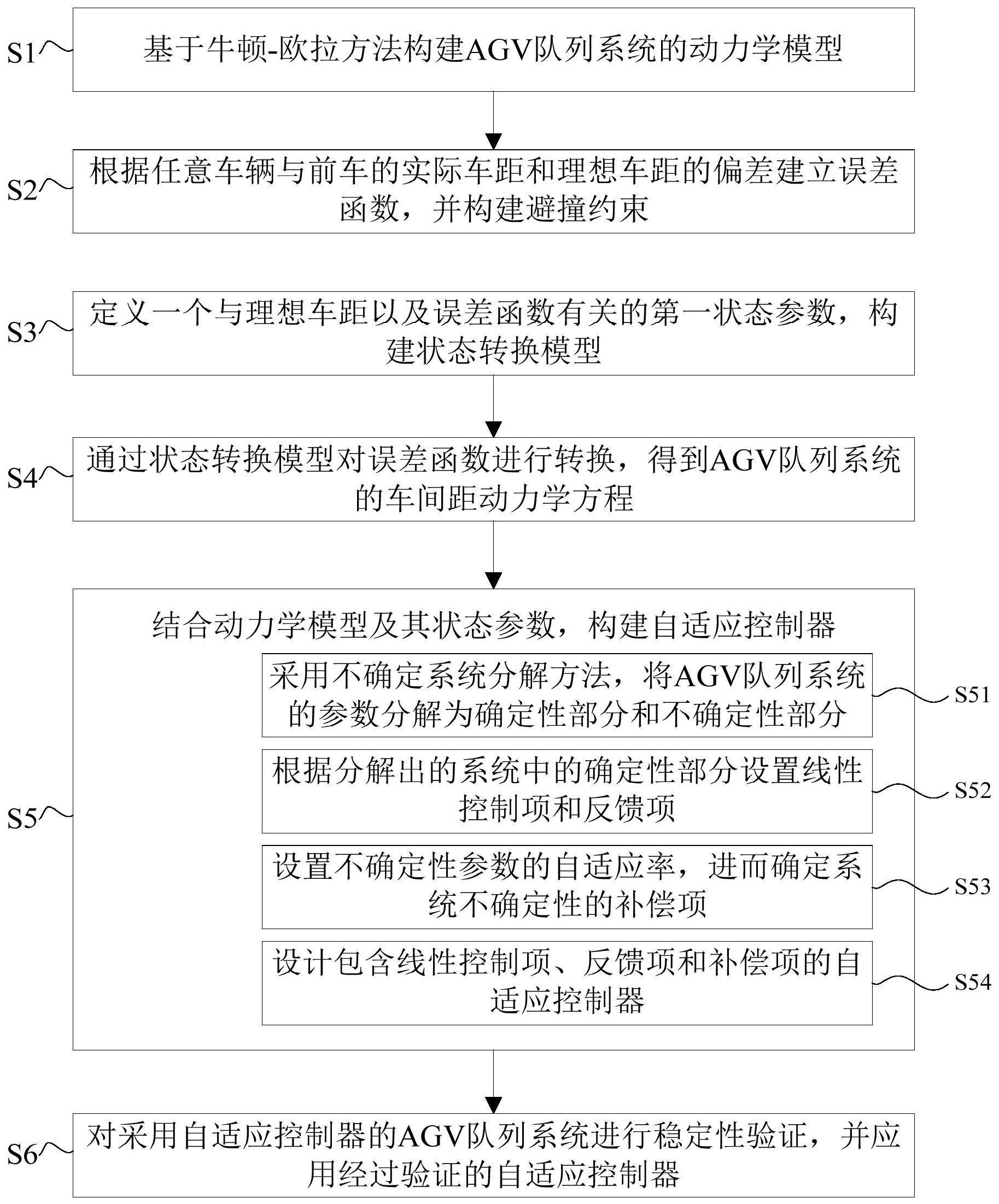
4、s1:基于牛顿-欧拉方法构建agv队列系统的动力学模型。
5、s2:根据任意车辆与前车的实际车距si和理想车距的偏差建立误差函数ei(t),并构建避撞约束。
6、s3:定义γi1为一个与理想车距以及误差函数有关的第一状态参数,其对应的高速状态转换模型如下:
7、
8、s4:通过高速状态转换模型对误差函数进行转换,得到agv队列系统的车间距动力学方程。
9、s5:结合所述动力学模型以及车间距动力学方程中的状态参数,构建一个满足全局避撞约束的自适应控制器,包括如下步骤:
10、s51:采用不确定系统分解方法,将agv队列系统的动力学模型中的参数分解为确定性部分和不确定性部分。
11、s52:根据分解出的系统中的确定性部分设置线性控制项ui1和反馈项u i2:
12、
13、上式中,和分别表示第i个车辆的动力学模型中行驶阻力fi和质量mi的确定性部分;γi2表示第二状态参数,和分别为第一状态参数的二阶导数中误差函数的一阶系数和二阶系数;γi3表示第三状态参数;
14、s53:设置用于估计agv队列系统中的不确定性参数αi的自适应率,进而确定系统不确定性的补偿项ui3:
15、
16、上式中,表示不确定性参数的估计值;表示不确定参数αi的估计函数;表示函数的补偿函数;表示与有关的调整系数;γi表示求和函数项数。
17、s54:设计包含线性控制项ui1、反馈项ui2和补偿项ui3的自适应控制器;自适应控制器中的控制力输入ui为:
18、ui=ui1+ui2+ui3。
19、s6:对采用自适应控制器的agv队列系统进行稳定性验证,并利用经过验证的自适应控制器实现agv队列系统的全局避障和稳定控制。
20、作为本发明进一步的改进,步骤s1中,任意车辆的动力学方程如下:
21、
22、上式中,t表示时间;χi表示车辆的位移;σi表示设计的不确定参数;ui表示控制力输入;mi表示第i辆车的质量;表示包括滚动阻力、加速阻力和其他外部干扰的行驶阻力的总和。
23、作为本发明进一步的改进,步骤s2中,在初始安全条件下,任意车辆i与前车不发生碰撞的充要条件为:
24、
25、上式中,表示第当前车辆i的前车的车身长度;
26、误差函数为:
27、
28、则agv队列系统的避撞约束为:
29、
30、作为本发明进一步的改进,步骤s4中,agv队列系统满足车辆避撞的二阶约束为:
31、
32、转换后的车间距动力学方程如下:
33、
34、作为本发明进一步的改进,步骤s5中,一阶系数、二阶系数和第三状态参数分别满足:
35、
36、
37、
38、作为本发明进一步的改进,在步骤s51agv队列系统的动力学模型中,系统参数分解如下:
39、
40、上式中,和分别表示第i个车辆的行驶阻力和质量的确定性部分;δmi和δfi分别表示第i个车辆的行驶阻力和质量的不确定性部分。
41、作为本发明进一步的改进,步骤s52中,控制力输入中的反馈项ui2满足:
42、
43、上式中,βi为一个自适应反馈控制系数,且满足:
44、
45、作为本发明进一步的改进,步骤s53中,不确定性参数αi的自适应律为:
46、
47、上式中,k1表示偏微分系数;表示不确定参数估计值的估计函数:表示与第二状态参数相关的函数,k2表示估计值系数。
48、作为本发明进一步的改进,估计函数函数的补偿系数满足:
49、
50、本发明还包括一种ag队列系统的避撞控制器,其采用如前述的基于高速状态转换模型的agv队列的避撞控制方法中设计的自适应控制器;避撞控制器用于快速实现agv队列系统的队列成形和避撞控制。
51、本发明提供的技术方案,具有如下有益效果:
52、本发明针对agv队列系统提出了一种新的基于分段函数的高速状态转换模型,利用该模型可以将大幅简化控制系统的设计,并实现系统稳定性的快速收敛,进而使得控制系统具有高速率的特性。此外,基于重新设计的高速率高速状态转换模型,本发明还将避撞约束引入到了agv队列系统而非各个agv车辆中,进而实现了agv队列系统的全局避撞设计。本发明方案可以保证系统在行驶过程中不发生碰撞,并且可以保持在所规定的理想车距左右,从而可保证队列系统的紧凑性。
53、本发明提供的控制方法及其自适应控制器与传统方案相比,具有收敛速度快,控制精度高,可实现全局避撞的特性,非常适合在agv队列系统控制中进行推广应用。
技术特征:
1.一种基于高速状态转换模型的agv队列的避撞控制方法,其特征在于,所述避撞控制方法包括如下步骤:
2.如权利要求1所述的基于高速状态转换模型的agv队列的避撞控制方法,其特征在于:步骤s1中,任意车辆的动力学方程如下:
3.如权利要求2所述的基于高速状态转换模型的agv队列的避撞控制方法,其特征在于:步骤s2中,在初始安全条件下,任意车辆i与前车不发生碰撞的充要条件为:
4.如权利要求3所述的基于高速状态转换模型的agv队列的避撞控制方法,其特征在于:步骤s4中,所述agv队列系统满足车辆避撞的二阶约束为:
5.如权利要求4所述的基于高速状态转换模型的agv队列的避撞控制方法,其特征在于:步骤s5中,所述一阶系数、所述二阶系数和所述第三状态参数分别满足:
6.如权利要求5所述的基于高速状态转换模型的agv队列的避撞控制方法,其特征在于,在步骤s51的所述agv队列系统的动力学模型中,系统参数分解如下:
7.如权利要求5所述的基于高速状态转换模型的agv队列的避撞控制方法,其特征在于,步骤s52中,所述控制力输入中的反馈项ui2满足:
8.如权利要求5所述的基于高速状态转换模型的agv队列的避撞控制方法,其特征在于:步骤s53中,不确定性参数αi的自适应律为:
9.如权利要求5所述的基于高速状态转换模型的agv队列的避撞控制方法,其特征在于:估计函数函数的补偿系数满足:
10.一种ag队列系统的避撞控制器,其特征在于,其采用如权利要求1-9中任意一项所述的基于高速状态转换模型的agv队列的避撞控制方法中设计的所述自适应控制器;所述避撞控制器用于快速实现agv队列系统的队列成形和避撞控制。
技术总结
本发明属于自动控制领域,具体涉及一种基于高速状态转换模型的AGV队列的避撞控制方法及其控制器。该方法包括如下步骤:S1:基于牛顿‑欧拉方法构建AGV队列系统的动力学模型。S2:根据车辆间实际车距和理想车距的偏差建立误差函数,并构建避撞约束。S3:定义一个与理想车距及其误差有关的第一状态参数,构建高速状态转换模型;S4:通过高速状态转换模型对误差函数进行转换得到车间距动力学方程。S5:结合动力学模型以及车间距动力学方程中的状态参数构建满足全局避撞约束的自适应控制器。自适应控制器中包含线性控制项、反馈项和补偿项。本发明解决了现有AGV队列系统的控制精度不足,稳定性差,无法实现全局避撞的问题。
技术研发人员:赵晓敏,胡上弘,林育明,崔峥嵘,董方方,李斌鹤,潘畅,牛帅
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!