基于笛卡尔空间的轨迹匀速过渡方法和装置与流程
本申请涉及机器人,具体而言,涉及一种基于笛卡尔空间的轨迹匀速过渡方法和装置。
背景技术:
1、在新能源电池、3c等领域的零部件装配工序中,涂胶工艺具有效率高、固定性能好以及具备散热功能等特点,对零部件的制造质量以及长期运行的稳定性起着重要的作用。
2、机器人作为智能制造的重要载体,在复杂零部件结构的涂胶中比起数控机床、专用机床,具有加工低廉、工作空间大、灵活性高等优点,已经广泛应用于涂胶行业。
3、但是,在当前的机器人涂胶的切削工艺的轨迹规划方法中,通常会在作业空间进行连续的直线和圆弧的轨迹运动,为了避免速度与加速度在中间的目标点跳变,需要在每一个目标点的速度都降为0,这种连续启停运动会降低机器人的作业效率,增加时间成本和能耗成本。
技术实现思路
1、本申请实施例的目的在于提供一种基于笛卡尔空间的轨迹匀速过渡方法和装置,用以解决现有技术中轨迹过渡会降低机器人作业效率的技术问题。
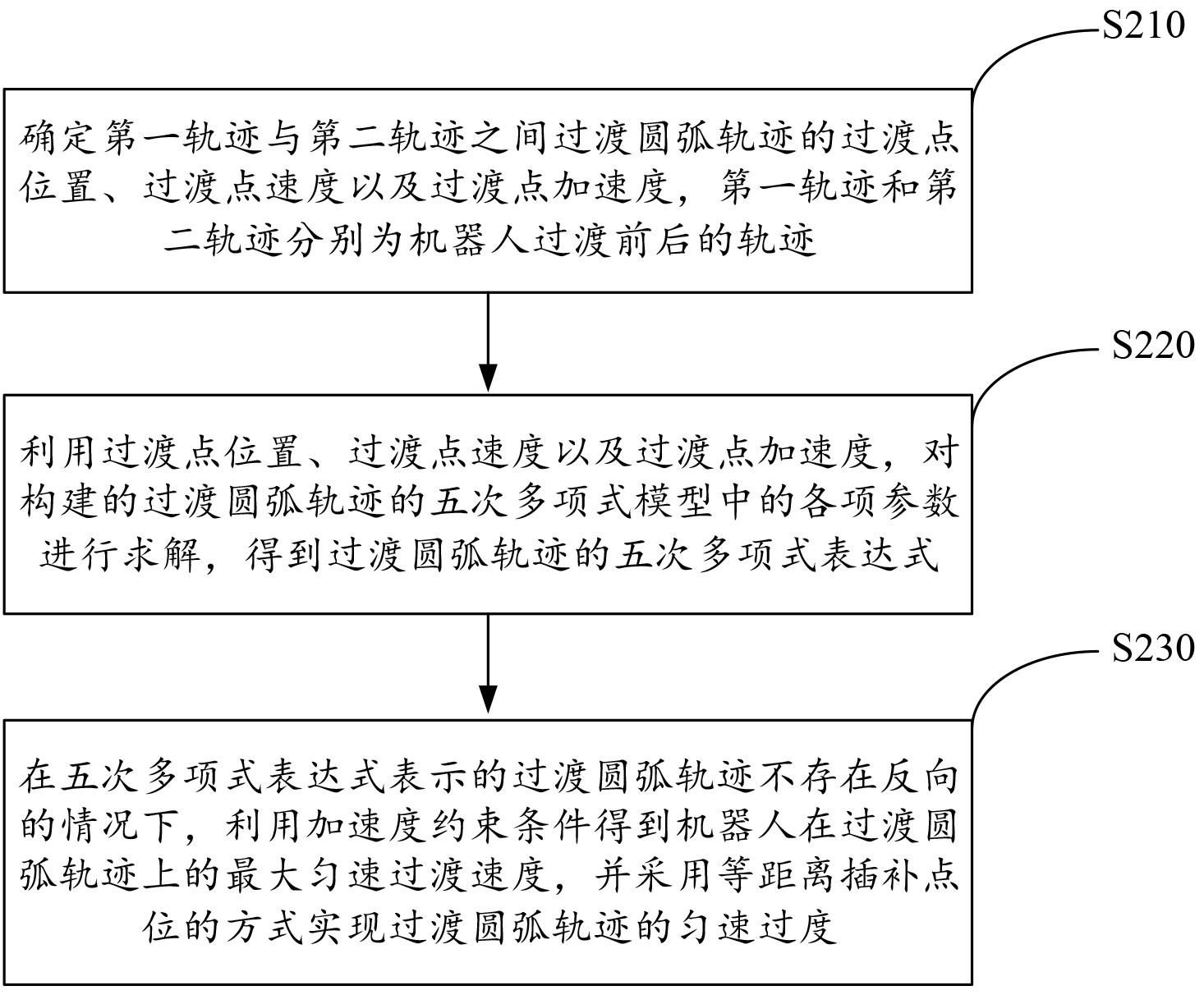
2、第一方面,本发明提供了一种基于笛卡尔空间的轨迹匀速过渡方法,包括:确定第一轨迹与第二轨迹之间过渡圆弧轨迹的过渡点位置、过渡点速度以及过渡点加速度,其中,第一轨迹和第二轨迹分别为机器人过渡前后的轨迹;利用过渡点位置、过渡点速度以及过渡点加速度,对构建的过渡圆弧轨迹的五次多项式模型中的各项参数进行求解,得到过渡圆弧轨迹的五次多项式表达式;在五次多项式表达式表示的过渡圆弧轨迹不存在反向的情况下,利用加速度约束条件得到机器人在过渡圆弧轨迹上的最大匀速过渡速度,并采用等距离插补点位的方式实现过渡圆弧轨迹的匀速过度。
3、第二方面,本发明还提供了一种基于笛卡尔空间的轨迹匀速过渡装置,包括:确定单元,用于确定第一轨迹与第二轨迹之间过渡圆弧轨迹的过渡点位置、过渡点速度以及过渡点加速度,其中,第一轨迹和第二轨迹分别为机器人过渡前后的轨迹;处理单元,用于利用过渡点位置、过渡点速度以及过渡点加速度,对构建的过渡圆弧轨迹的五次多项式模型中的各项参数进行求解,得到过渡圆弧轨迹的五次多项式表达式;过渡单元,用于在五次多项式表达式表示的过渡圆弧轨迹不存在反向的情况下,利用加速度约束条件得到机器人在过渡圆弧轨迹上的最大匀速过渡速度,并采用等距离插补点位的方式实现过渡圆弧轨迹的匀速过度。
4、第三方面,本发明提供了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器通过计算机程序执行上述的方法。
5、第四方面,本发明提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器运行时执行上述实施方式任一项的方法的步骤。
6、采用本申请提供的一种基于笛卡尔空间的轨迹匀速过渡方法和装置,通过确定第一轨迹与第二轨迹之间过渡圆弧轨迹的过渡点位置、过渡点速度以及过渡点加速度,第一轨迹和第二轨迹分别为机器人过渡前后的轨迹;利用过渡点位置、过渡点速度以及过渡点加速度,对构建的过渡圆弧轨迹的五次多项式模型中的各项参数进行求解,得到过渡圆弧轨迹的五次多项式表达式;在五次多项式表达式表示的过渡圆弧轨迹不存在反向的情况下,利用加速度约束条件得到机器人在过渡圆弧轨迹上的最大匀速过渡速度,并采用等距离插补点位的方式实现过渡圆弧轨迹的匀速过度。可以进行速度平滑、加速度连续的过渡,避免了对作业的影响,可以解决现有技术中轨迹过渡会降低机器人作业效率的技术问题。
技术特征:
1.一种基于笛卡尔空间的轨迹匀速过渡方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述第一轨迹和所述第二轨迹均为直线轨迹的情况下,确定第一轨迹与第二轨迹之间过渡圆弧轨迹的过渡点位置、过渡点速度以及过渡点加速度,包括:
3.根据权利要求1所述的方法,其特征在于,在所述第一轨迹为直线轨迹且所述第二轨迹为曲线轨迹的情况下,确定第一轨迹与第二轨迹之间过渡圆弧轨迹的过渡点位置、过渡点速度以及过渡点加速度,包括:
4.根据权利要求1所述的方法,其特征在于,利用所述过渡点位置、所述过渡点速度以及所述过渡点加速度,对构建的所述过渡圆弧轨迹的五次多项式模型中的各项参数进行求解,得到所述过渡圆弧轨迹的五次多项式表达式,包括:
5.根据权利要求1所述的方法,其特征在于,确定所述五次多项式表达式表示的所述过渡圆弧轨迹是否存在反向,包括:
6.根据权利要求1所述的方法,其特征在于,利用加速度约束条件得到机器人在所述过渡圆弧轨迹上的最大匀速过渡速度,包括:
7.根据权利要求1至6中任意一项所述的方法,其特征在于,在确定第一轨迹与第二轨迹之间过渡圆弧轨迹的过渡点位置、过渡点速度以及过渡点加速度之前,所述方法还包括:
8.一种基于笛卡尔空间的轨迹匀速过渡装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器通过所述计算机程序执行上述权利要求1至7任一项中所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其特征在于,所述计算机程序被处理器运行时执行上述权利要求1至7任一项所述的方法的步骤。
技术总结
本申请提供一种基于笛卡尔空间的轨迹匀速过渡方法和装置,涉及机器人技术领域。该方法包括:确定第一轨迹与第二轨迹之间过渡圆弧轨迹的过渡点位置、过渡点速度以及过渡点加速度,其中,第一轨迹和第二轨迹分别为机器人过渡前后的轨迹;利用过渡点位置、过渡点速度以及过渡点加速度,对构建的过渡圆弧轨迹的五次多项式模型中的各项参数进行求解,得到过渡圆弧轨迹的五次多项式表达式;在五次多项式表达式表示的过渡圆弧轨迹不存在反向的情况下,利用加速度约束条件得到机器人在过渡圆弧轨迹上的最大匀速过渡速度,并采用等距离插补点位的方式实现过渡圆弧轨迹的匀速过度。
技术研发人员:任鑫成,王景汉,李清蕾,陈立,刘逸辉,陈旺怡
受保护的技术使用者:杭州芯控智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!