锥杆式的无人机车辆行进间动态对接平台
本申请涉及控制系统,特别涉及一种锥杆式的无人机车辆行进间动态对接平台。
背景技术:
1、无人机以高速、便捷、高机动性等优势在城市物流、农业监测、电力巡检和应急救援等诸多领域发挥了愈发重要的作用;但无人机受制于运载能力差、续航里程低等问题,无法执行大规模、复杂的任务。
2、相关技术中,可以使用一种将无人机同现有的交通参与者(如巴士、卡车、私家车等)联系在一起的方式,通过设计一种车载无人机起降平台,能够使无人机搭乘社会车辆的“顺风车”,达到扩大无人机活动覆盖范围和节约能源的目的。
3、然而,相关技术中车载起降平台存在降落机型固定、降落冲击大、高速下响应差、应急反应慢等问题,使得无人机在车辆高速行驶、于崎岖路段行驶和于恶劣天气下行驶等多种工况中出现降落位置不准确、降落姿态异常甚至降落失败等情况,无法满足实际使用需要。
技术实现思路
1、本申请提供一种锥杆式的无人机车辆行进间动态对接平台,以解决相关技术中,无人机在车顶等起降时,算法精度较低,使得无人机降落位置不准确、降落姿态不稳定,进而降低对接准确度和安全性,且与不同应用场景的适配度较低等问题。
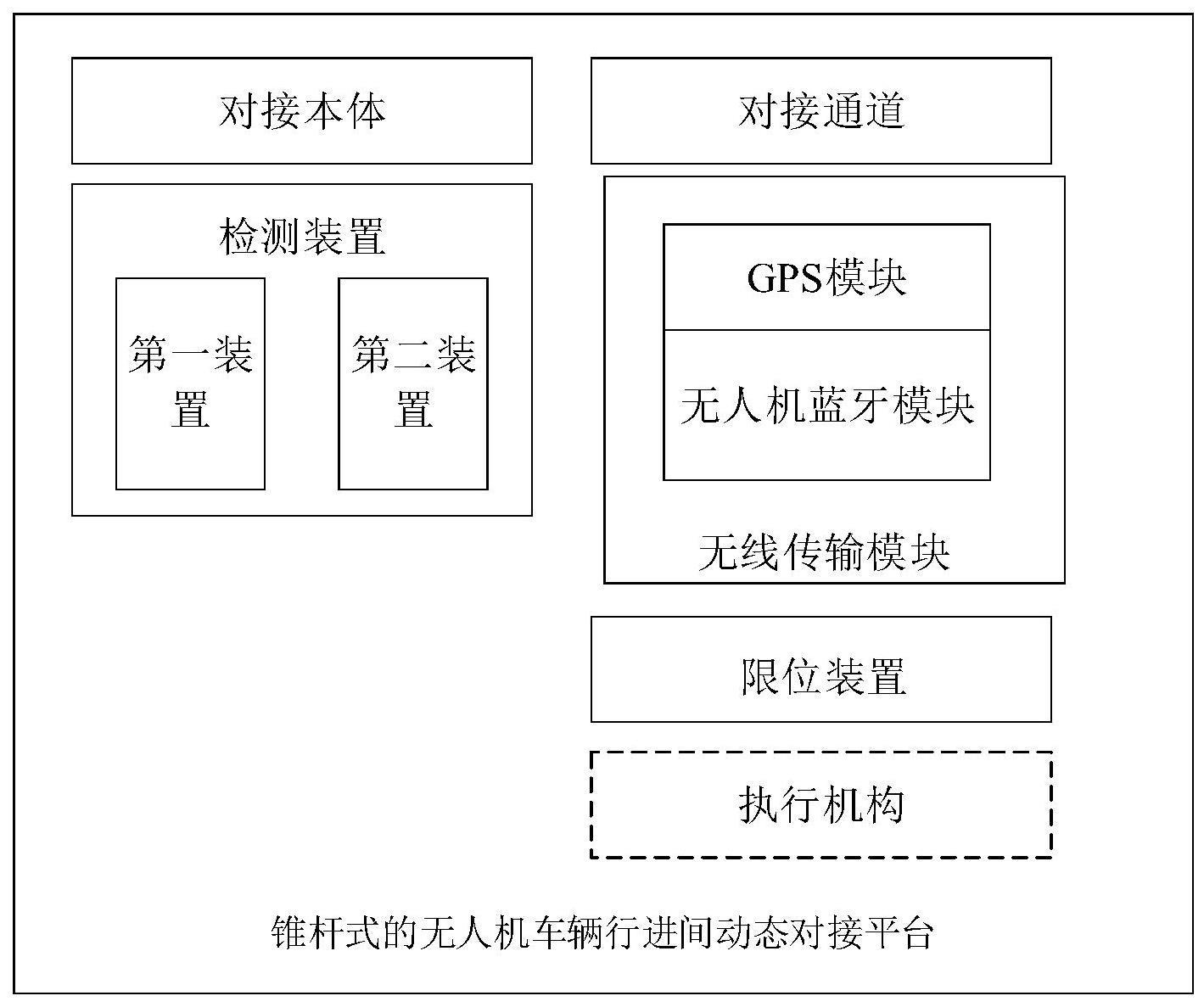
2、本申请第一方面实施例提供一种锥杆式的无人机车辆行进间动态对接平台,包括:呈漏斗状的对接本体;检测装置,用于在无人机与所述对接平台进行对接的过程中,检测所述对接本体的对接通道内物体通过信号和物体与所述对接通道间接触信号;限位装置,用于在所述物体通过信号关闭,以限制所述无人机端的柔性对接件在无人机端与所述对接平台进行对接的过程中出现反卷,其中,在根据所述接触信号确定所述无人机与所述对接平台对接成功后,所述无人机的固定件与所述对接通道配合将所述无人机端固定于所述对接平台上。
3、可选地,所述对接本体的壁面为盘形或碗形,所述对接本体的截面为曲线。
4、可选地,所述检测装置包括检测物体通过的第一装置和感受物体间接触的第二装置,其中,所述第一装置用于检测所述对接本体的对接通道内物体通过信号;所述第二装置用于感知所述对接本体与所述无人机之间的接触信号。
5、可选地,所述执行机构设置于所述无人机上或所述锥杆式的无人机车辆行进间动态对接平台上。
6、可选地,所述柔性对接件包括柔性件和设置于所述柔性件前端的对接元件。
7、本申请第二方面实施例提供一种无人机车辆行进间动态对接方法,所述方法利用如上述实施例所述的锥杆式的无人机车辆行进间动态对接平台进行对接,其中,所述方法包括以下步骤:在无人机与车辆对接开始后,所述无人机释放柔性对接件;检测接本体的对接通道内物体通过信号和物体与所述对接通道间接触信号,根据所述物体通过信号关闭限位装置,以限制所述柔性对接件出现反卷,根据所述物体通过信号控制执行结构回收所述柔性对接件,根据所述接触信号确定所述无人机与所述对接平台是否对接成功;在所述无人机与所述对接平台的对接成功后,控制所述执行结构停止回收所述柔性对接件,并发送电机关闭指令至所述无人机,其中,所述无人机根据所述电机关闭指令关闭旋翼电机,且所述无人机的固定件与所述对接通道配合将所述无人机端固定于所述对接平台上。
8、可选地,所述根据所述接触信号确定所述无人机与所述对接平台是否对接成功,包括:识别所述接触信号得到所述固定件与所述对接通道接触的当前压力;若所述当前压力大于压力阈值,则判定所述述无人机与所述对接平台对接成功。
9、可选地,若所述执行结构设置于所述对接平台上,所述根据所述物体通过信号控制执行结构回收所述柔性对接件,包括:根据所述物体通过信号生成回收指令;利用所述回收指令控制所述执行结构回收所述柔性对接件。
10、可选地,所述控制所述执行结构停止回收所述柔性对接件,包括:在所述无人机与所述对接平台的对接成功后,生成停止回收指令;利用所述停止回收指令控制所述执行结构停止回收所述柔性对接件。
11、可选地,若所述执行结构设置于所述无人机上,所述根据所述物体通过信号控制执行结构回收所述柔性对接件,包括:根据所述物体通过信号生成回收指令;发送所述回收指令至所述无人机,其中,所述无人机利用所述回收指令控制所述执行结构回收所述柔性对接件。
12、可选地,所述控制所述执行结构停止回收所述柔性对接件,包括:在所述无人机与所述对接平台的对接成功后,生成停止回收指令;发送所述停止回收指令至所述无人机,其中,所述无人机利用所述停止回收指令控制所述执行结构停止回收所述柔性对接件。
13、由此,本申请至少具有如下有益效果:
14、本申请实施例可以使用一种锥杆式的无人机车辆行进间动态对接平台与无人机进行对接,由于对无人机起降平台进行设计考虑,因此与无人机实际起降情况契合度更高,降低对感知和控制算法精度的要求,使得在极端天气等多种工况下可以实现无人机的准确降落,提升降落稳定性和效率,进而提升对接安全性,满足实际使用需要,提升用户使用体验。
15、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种锥杆式的无人机车辆行进间动态对接平台,其特征在于,包括:
2.根据权利要求1所述的锥杆式的无人机车辆行进间动态对接平台,其特征在于,所述对接本体的壁面为盘形或碗形,所述对接本体的截面为曲线。
3.根据权利要求1所述的锥杆式的无人机车辆行进间动态对接平台,其特征在于,所述检测装置包括检测物体通过的第一装置和感受物体间接触的第二装置,其中,
4.根据权利要求1所述的锥杆式的无人机车辆行进间动态对接平台,其特征在于,所述柔性对接件包括柔性件和设置于所述柔性件前端的对接元件。
5.一种无人机车辆行进间动态对接方法,其特征在于,所述方法利用如权利要求1-4任意一项所述的锥杆式的无人机车辆行进间动态对接平台进行对接,其中,所述方法包括以下步骤:
6.根据权利要求5所述的无人机车辆行进间动态对接方法,其特征在于,所述根据所述接触信号确定所述无人机与所述对接平台是否对接成功,包括:
7.根据权利要求5所述的无人机车辆行进间动态对接方法,其特征在于,若所述执行结构设置于所述对接平台上,所述根据所述物体通过信号控制执行结构回收所述柔性对接件,包括:
8.根据权利要求7所述的无人机车辆行进间动态对接方法,其特征在于,所述控制所述执行结构停止回收所述柔性对接件,包括:
9.根据权利要求5所述的无人机车辆行进间动态对接方法,其特征在于,若所述执行结构设置于所述无人机上,所述根据所述物体通过信号控制执行结构回收所述柔性对接件,包括:
10.根据权利要求9所述的无人机车辆行进间动态对接方法,其特征在于,所述控制所述执行结构停止回收所述柔性对接件,包括:
技术总结
本申请涉及控制系统技术领域,特别涉及一种锥杆式的无人机车辆行进间动态对接平台,包括:呈漏斗状的对接本体;检测装置,用于在无人机与对接平台进行对接的过程中,检测对接本体的对接通道内物体通过信号和物体与对接通道间接触信号;限位装置,用于在物体通过信号关闭,以限制无人机端的柔性对接件在无人机端与对接平台进行对接的过程中出现反卷,其中,在根据接触信号确定无人机与对接平台对接成功后,无人机的固定件与对接通道配合将无人机端固定于对接平台上。解决了无人机在车顶起降算法精度较低,降落准确性和稳定性较差,应用场景局限等问题。
技术研发人员:曲小波,周锴,王凯
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!