一种基于单向路径的移动机器人控制方法、装置与流程
本发明涉及移动机器人控制领域,特别地,涉及一种基于单向路径的移动机器人控制方法。
背景技术:
1、随着机器人的智能化,越来越多的机器人被应用于各行各业中。不同的应用场景,对机器人的控制也各不相同。
2、以单向路径应用场景为例。对于在单向路径进行移动的移动机器人而言,一方面移动机器人速度较快,另一方面经过直角转弯、换向的路径时需要减速,而经过之后又需要加速,这导致对移动机器人的控制变得非常复杂,因此,对基于单向路径的移动机器人进行高效合理的控制显得尤为重要。
技术实现思路
1、本发明提供了一种基于单向路径的移动机器人控制方法,以提高移动机器人的运行效率。
2、本发明第一方面提供了一种基于单向路径的移动机器人控制方法,该方法包括:在调度系统侧,
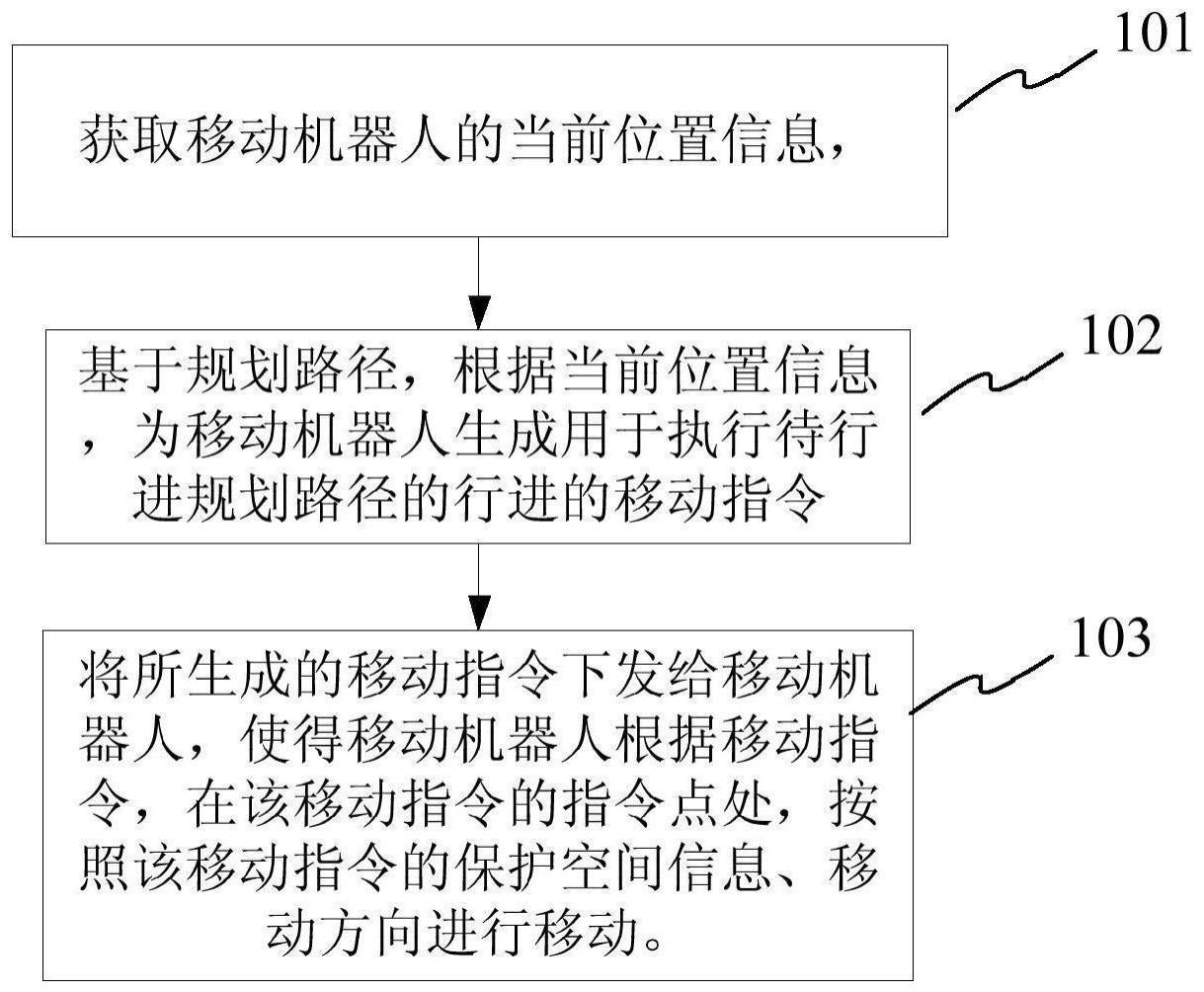
3、获取移动机器人的当前位置信息,
4、基于规划路径,根据当前位置信息,为移动机器人生成用于执行待行进规划路径的行进的移动指令,
5、其中,
6、规划路径包括至少一个以上单向路径,
7、移动指令包括:移动机器人的移动方向、以及指令点信息,该指令点信息为用于避免移动机器人发生碰撞的保护空间所在待行进规划路径上对应的保护空间终结位置点信息,
8、将所生成的移动指令下发给移动机器人,使得移动机器人根据移动指令,以该移动指令的移动方向移动至指令点处。
9、可选地,所述基于规划路径,根据当前位置信息,为移动机器人生成用于执行待行进规划路径的行进的移动指令,包括:
10、对于任一移动机器人,
11、根据该移动机器人的规划路径,确定所需生成的移动指令,
12、根据除该移动机器人之外的其他移动机器人的保护空间信息、该移动机器人的当前位置信息和规划路径,确定所需生成的移动指令的保护空间信息,
13、根据该移动机器人的当前位置信息和所确定的保护空间信息,确定所需生成的移动指令的指令点信息,
14、根据当前位置信息和规划路径,确定移动方向。
15、可选地,所述规划路径按照如下方式生成:
16、获取拓扑地图数据,其中,拓扑地图包括拓扑地图点信息以及用于描述单向路径的拓扑线信息,所述拓扑线为用于连接两拓扑地图点之间的有向线段,
17、基于拓扑地图数据,根据移动机器人的当前位置以及目标位置点,生成规划路径,其中,规划路径包括:移动机器人需要依次经过的拓扑地图点信息、经过拓扑地图点的移动方向、以及在拓扑地图点处是否需要换向的换向信息。
18、可选地,该方法进一步包括:
19、在两个以上单向路径汇聚的拓扑地图点处,通过对移动机器人的保护空间的设置,进行优先级通行控制。
20、可选地,所述获取移动机器人的当前位置信息,包括:
21、接收移动机器人上报的位置信息,基于拓扑地图数据中的拓扑地图点和拓扑线,对所接收的位置信息进行拟合,将拟合至拓扑地图点或拓扑线的拟合位置作为当前位置信息。
22、可选地,所述移动机器人上报的位置信息是按照设定的频次上报,所述移动指令按照设定的时间间隔生成。
23、可选地,所述移动指令包括:用于控制移动机器人在无换向点路径移动的非跨换向点指令、用于控制移动机器人在换向点处换向的跨换向点指令中的至少之一,
24、可选地,所述非跨换向点指令以如下方式生成:
25、对于任一移动机器人,
26、根据除该移动机器人之外的其他移动机器人的保护空间信息、以及根据该移动机器人当前位置信息所确定的待行进规划路径,生成非跨换向点指令。
27、可选地,所述跨换向点指令以如下方式生成:
28、对于任一移动机器人,
29、根据该移动机器人的待行进规划路径中的换向点信息、以及该移动机器人当前位置信息,生成跨换向点指令。
30、可选地,所述基于拓扑地图数据,根据移动机器人的当前位置以及目标位置点,生成规划路径,包括:
31、检测目标位置点是否位于拓扑地图上,以及检测移动机器人当前位置是否位于拓扑地图上,
32、当目标位置点、移动机器人当前位置均位于拓扑地图上时,生成从当前位置点到目标位置点所在的拓扑地图点或者拓扑线的最短规划路径。
33、可选地,所述根据除该移动机器人之外的其他移动机器人的保护空间信息、以及根据该移动机器人当前位置信息所确定的待行进规划路径,生成非跨换向点指令,包括:
34、根据移动机器人的当前位置信息,沿待行进规划路径延伸,确定与当前位置距离最近的换向点,计算当前位置与换向点之间的距离,
35、在当前位置与换向点之间的距离小于等于设定的第一距离阈值的情形下,为该移动机器人生成从上一次生成指令的指令点到换向点的增量保护空间,
36、在当前位置与换向点之间的距离大于设定的第一距离阈值的情形下,为该移动机器人生成从上一次生成指令的指令点到当前位置沿待行进规划路径延伸第一距离阈值所在位置点的增量保护空间,
37、将所生成的增量保护空间与其他所有移动机器人的保护空间进行碰撞检测,
38、若不存在碰撞,则生成增量指令,该增量指令的保护空间为所生成的增量保护空间,
39、若存在碰撞,则将该增量保护空间裁切掉碰撞空间,得到裁切后的增量保护空间,基于裁切后的增量保护空间对应的位置点,生成增量指令,该增量指令的保护空间为裁切后的增量保护空间,
40、若增量指令的指令点位于上一次生成的指令点之后,则用该增量指令替换掉上一次生成的指令,将该增量指令作为非跨换向点指令,并将该增量指令的增量保护空间拼接于所述上一次生成的指令的保护空间之后,根据当前位置裁切掉已经行走过的保护空间,得到该非跨换向点指令的保护空间,将该保护空间所在待行进规划路径的终结位置作为该非跨换向点指令的指令点,
41、若增量指令的指令点位于上一次生成的指令点之前,则不替换掉掉上一次生成的指令而保持该增量指令不变,将该增量指令作为非跨换向点指令,根据当前位置裁切掉已经行走过的保护空间,得到该非跨换向点指令的保护空间,将该保护空间所在待行进规划路径的终结位置作为该非跨换向点指令的指令点。
42、可选地,所述用该增量指令替换掉上一次生成的指令点对应的上一次生成的指令之前,进一步包括:
43、若增量指令的指令点位于上一次生成的指令点之后,且在当前位置与上一次生成的指令点之间的距离小于设定的第二距离阈值的情形下,则放弃用该增量指令替换掉上一次生成的指令,将该上一次生成的指令作为非跨换向点指令,并将该增量指令的增量保护空间拼接于该上一次生成的指令的保护空间之后,根据当前位置裁切掉已经行走过的保护空间,得到该非跨换向点指令的保护空间。
44、可选地,所述根据该移动机器人的待行进规划路径中的换向点信息、以及该移动机器人当前位置信息,生成跨换向点指令,包括:
45、在上一次生成的指令的指令点为规划路径所包括的换向点中的任意一第一换向点、且移动机器人当前位置与第一换向点之间的距离小于设定的第三距离阈值的情形下,从第一换向点沿待行走规划路径延伸设定的第四距离阈值,
46、若在延伸距离内存在第二换向点,则生成增量指令,该增量指令的指令点为所述第一换向点和第二换向点之间的中点,该增量指令的增量保护空间从第一换向点到中点,
47、若在延伸距离内不存在第二换向点,则生成增量指令,该增量指令的指令点为从第一换向点沿待行走规划路径延伸至第四距离阈值处的位置,该增量保护空间从第一换向点到该增量指令的指令点;
48、将所生成增量指令的增量保护空间与其他所有移动机器人的保护空间进行碰撞检测,
49、若存在碰撞,则将该所生成增量保护空间裁切掉碰撞空间,得到裁切后的增量保护空间,用裁切后的增量保护空间更新所生成增量指令的保护空间,更新后的保护空间所在待行进规划路径位置为所生成增量指令的指令点,
50、若所生成增量指令的指令点位于第一换向点之后,则:
51、检查上一次生成的指令是否有换向后指令,如果没有换向后指令,则将该所生成增量指令作为换向后指令,并将该所生成增量指令的增量保护空间拼接至所述上一次生成的指令的保护空间,
52、如果有换向后指令,则将该所生成增量指令的增量保护空间拼接至换向后指令的保护空间,将拼接后的保护空间所在待行进规划路径终结位置作为所生成增量指令的指令点,得到跨换向点指令。
53、可选地,所述在两个以上单向路径汇聚的拓扑地图点处,通过对移动机器人的保护空间的设置,进行优先级通行控制,包括:
54、对于距离换向点在设定的第五距离阈值内的待换向移动机器人,
55、检查该待换向移动机器人的待行走规划路径是否存在最近的换向点且该换向点与当前位置之间的距离小于设定的第六距离阈值,并检查指令中是否存在指令点为该换向点的指令,
56、如果是,则为该待换向移动机器人生成以该换向点为中心的封锁空间,将该待换向移动机器人的移动方向作为封锁空间对应的方向,
57、检测所生成的封锁空间是否与其他移动机器人的保护空间存在碰撞,
58、若存在碰撞,则允许第一增量保护空间或者第二增量保护空间与该封锁空间发生碰撞,其中,第一增量保护空间为对该封锁空间进行封锁的移动机器人的增量保护空间,第二增量保护空间为当前移动方向即将经过该封锁空间且当前移动方向与封锁空间的方向一致的移动机器人的增量保护空间,
59、禁止其他移动机器人的增量保护空间与该封锁空间发生碰撞。
60、可选地,所述基于拓扑地图数据中的拓扑地图点和拓扑线,对所接收的位置信息进行拟合,包括:
61、在无历史局部定位结果或者无法进行局部定位的情形下,采用全局定位方式进行拟合,
62、在移动机器人正常移动的情形下,采用局部定位方式进行拟合,
63、可选地,全局定位方式包括:
64、遍历拓扑地图中所有拓扑地图点,计算所接收的当前位置到拓扑地图点之间的距离,若该距离在设定的第七距离阈值内,则将该拓扑地图点作为拟合位置,
65、在拟合至拓扑地图点失败的情形下,遍历拓扑地图中所有拓扑线,将拓扑线向两侧膨胀至设定的范围,若所接收的当前位置在所述范围内,则将该拓扑线作为拟合位置,并获取该拓扑线的方向信息,作为移动机器人的定位方向;
66、可选地,局部定位方式包括:
67、在移动机器人当前有规划路径的情形下,遍历规划路径所包含的拓扑地图点和拓扑线,按照全局定位方式进行拟合,
68、在拟合失败的情形下,根据上一定位结果,将所接收的当前位置拟合到上次定位结果中的邻点或者邻边,若拟合失败,则使用全局定位方式进行重新拟合。
69、本技术第二方面提供一种基于单向路径的移动机器人控制装置,该装置包括:
70、定位模块,用于获取移动机器人的当前位置信息,
71、移动指令生成模块,用于基于规划路径,根据当前位置信息,为移动机器人生成用于执行待行进规划路径的行进的移动指令,
72、其中,
73、规划路径包括至少一个以上单向路径,
74、移动指令包括:移动机器人的移动方向、以及指令点信息,该指令点信息为用于避免移动机器人发生碰撞的保护空间所在待行进规划路径上对应的保护空间终结位置点信息,
75、发送模块,用于将所生成的移动指令下发给移动机器人,使得移动机器人根据移动指令以该移动指令的移动方向移动至指令点处。
76、本技术第三方面提供一种用于移动机器人的调度系统,该调度系统包括所述的控制装置。
77、本技术实施例提供的一种基于单向路径的移动机器人控制方法,通过生成包括移动机器人的移动方向、以及用于避免移动机器人发生碰撞的保护空间信息所在待行进规划路径位置对应的指令点的移动指令,使得移动机器人可根据移动指令,以该移动指令的移动方向移动至指令点处,由于移动指令的指令点均位于待行进规划路径中,使得移动指令可提前生成并下发,避免了移动机器人减速或加速移动,通过保护空间信息,避免了移动机器人之间的碰撞,有利于提高移动机器人的通行效率和安全性;由于移动指令仅需携带有指令点、移动方向,可实现移动机器人的轻量化控制。
- 还没有人留言评论。精彩留言会获得点赞!