一种无人机机群编队控制方法及其装置与流程
本发明涉及无人机,具体是一种无人机机群编队控制方法及其装置。
背景技术:
1、无人机是无人驾驶飞机的简称,主要是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机一开始是作为军用生产制造,随着现代科技的高速发展,现在的无人机也开始民用化,越来越多的行业和个人开始使用无人机进行工作和娱乐,而在无人机的发展中,我国的无人机相关技术飞速发展,无人机系统种类繁多、用途广特点鲜明,致使其在尺寸、质量、航程、航时、飞行高度、飞行速度,任务等多方面都有较大差异,进而供给于不同行业个人更多的选择空间。
2、经检索专利公开号为:cn109445459b的“无人机机群编队控制方法及其装置”,其中包括以下步骤:步骤s100:设定无人机机群的编队参考点位置和目标参考点位置;步骤s200:根据无人机机群内各内部成员的期望位置、速度矢量以及加速度矢量,建立第i内部成员的运动学方程;步骤s300:基于人工势场法构建第i内部成员的加速度控制函数,以及第i内部成员在各编队参考点的速度控制函数,得到所有内部成员的速度控制函数;步骤s400:控制各内部成员以默认编队跟随编队参考点朝向目标参考点运动,该方法在人工势场法的基础上,增加机群虚拟成员对无人机机群内部成员的势场作用;但是在无人机编队机群控制时,采用全频段所有的无人机操控,使得无人机编队的控制精度降低,同时控制难度较大,存在更大的机能消耗,不利于无人机机群的长线精准行驶控制。
3、因此,本发明提供一种无人机机群编队控制方法及其装置来解决上述无人机编队机群控制时,采用全频段所有的无人机操控,使得无人机编队的控制精度降低,同时控制难度较大问题。
技术实现思路
1、针对上述情况,为克服现有技术之缺陷,本发明提供一种无人机机群编队控制方法及其装置,有效的解决了现有的无人机存在一定弊端的问题。
2、一种无人机机群编队控制方法及其装置,包括无人机本体、信号传输器、距离传感器、gps定位器和电磁磁吸条;
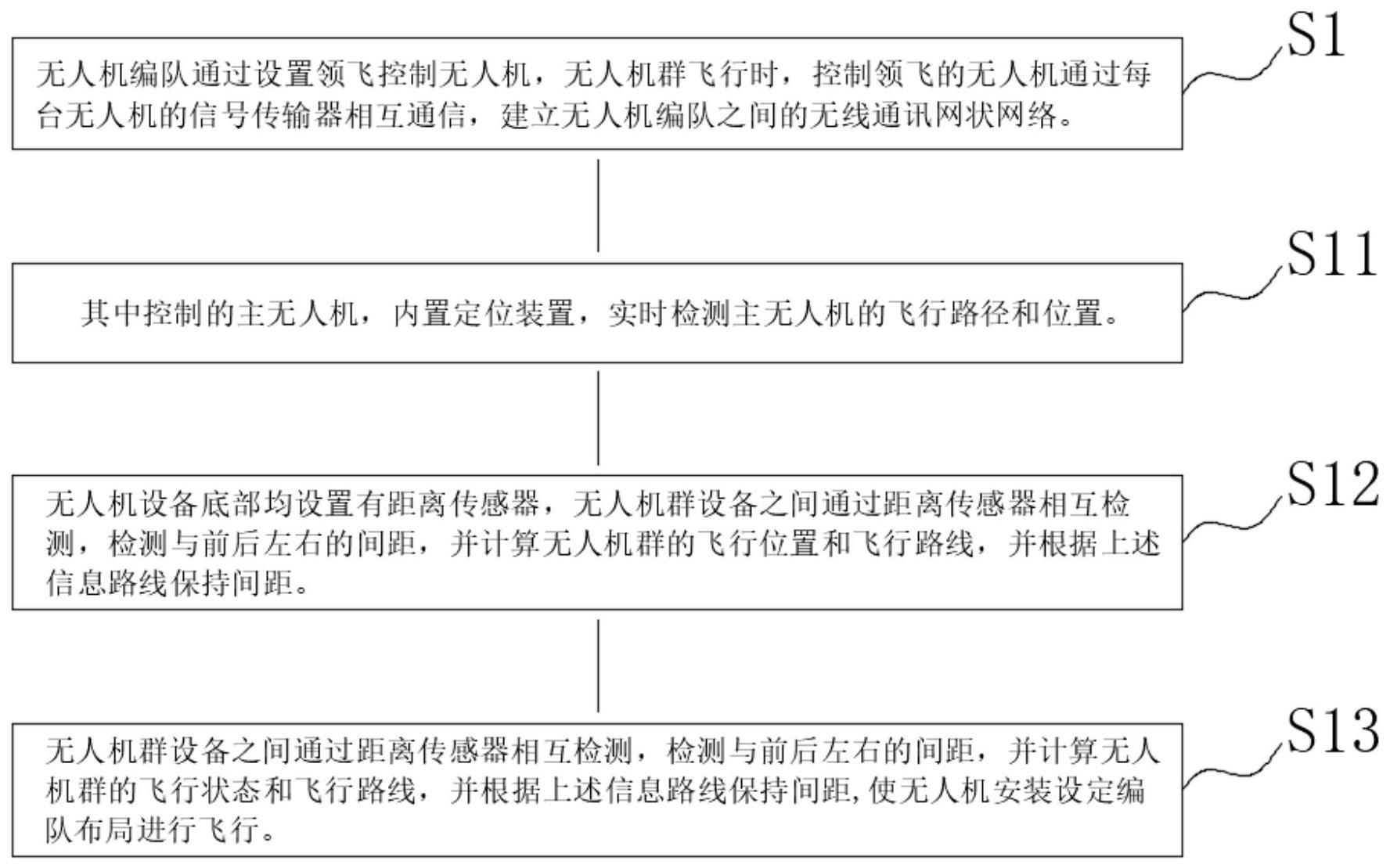
3、包括以下步骤:s1、无人机编队通过设置领飞控制无人机,无人机群飞行时,控制领飞的无人机通过每台无人机的信号传输器相互通信,建立无人机编队之间的无线通讯网状网络;
4、s11、其中控制的主无人机,内置定位装置,实时检测主无人机的飞行路径和位置;
5、s12、无人机群设备之间通过距离传感器相互检测,检测与前后左右的间距,并计算无人机群的飞行位置和飞行路线,并根据上述信息路线保持间距;
6、s13、无人机群设备之间通过距离传感器相互检测,检测与前后左右的间距,并计算无人机群的飞行状态和飞行路线,并根据上述信息路线保持间距,使无人机安装设定编队布局进行飞行。
7、优选的,s2、无人机编队起飞后,通过主控制无人机和其他无人机之间信号传输器交互,再由多个无人机相对位置的间距定位,获取多无人机群编队的编队形态模拟图像;
8、s21、然后在多组无人机之间切换检测,并进行杂点滤除,将杂点滤除后使得rot区域干扰滤除,通过查看剩余rot区中的标志点,判断无人机群的某一设备是否在线;
9、s22、当无人机编队飞行过程中,无人机相互检测间距,并通过信号传输交互,当无人机编队进行编队形态位置转换时,根据转向或是装换编队确定领飞无人机控制权转交;
10、s23、通过更换前进方向和编队转换,此时通过无人机之间的信号传输器通讯检测,配合距离传感器检测无人机群的编队位置,形成飞行模型,反馈控制电脑,之后在无人机编队之间建立的无线网状网络中,无人机可进行领飞控制切换,即可将领飞机重新设置,方便进行编队转换和转向。
11、优选的,s3、无人机群通过每3s向地面反馈依次低频精度的gps定位位置,通过gps定位器和无人机件的信号传输器,使得无人机群相互之间形成定位网格,综合网格定位信息,确定领飞主无人机是否处于无人机编队的前方领飞位置;
12、s31、当领飞主无人机在无人机编队前方时,此时无人机领导稳定飞行,当出现领飞主无人机为处于领飞位置时,此时由飞行方向最前方的无人机领飞;
13、s32、若检测前方无人机,则出现多个跟随无人机的机群时,此时通过距离传感器和gps,检测无人机机群多台无人机的位置关系,配合反馈的定位位置图像,可手动进行选择切换领飞无人机,保证无人机机群的飞行稳定。
14、优选的,s4、无人机编队的多个无人机,相互通过距离传感器进行无人机的相对距离检测,当出现无人机间距的距离小于阈值时,其中一台无人机会先降低飞行高度,避免碰撞;
15、s41、降低高度的无人机,通过无人机无线通讯网格网络进行控制,进行编队归入,此时通过其上方周围的其他无人机的距离传感器,对其进行距离检测,确定其与编队无人机的位置关系;
16、s42、随后有网格网络的通讯控制,提升该下降无人机进行提速转向,修正位置,过程中通过上方的其他无人机进行间距检测,当到达指定的间距位置后,此时通过主控无人机的信号传输器通讯控制,使其向上爬升,重新归入无人机编队的指定位置即可;
17、s43、无人机归入编队后,所有无人机开始同步的减速,然后通过低速飞行,然后通过距离传感器检测相互之间的距离,然后配合gps定位器反馈形成的位置点图像进行无人机编队之间的位置修正,之后再次通过无线网格通讯网络控制,同步加速重新进行编队飞行即可。
18、优选的,s5、当出现有无人机偏航或是其他意外情况发生事,通过主控制的无人机通讯模块反馈,然后利用无人机配备的信号传输器,使得离发生情况的无人机最近的一到两架无人机向其飞行移动;
19、s52、同时无人机底部均配备电磁磁力锁扣的方式吸附,通过救援无人机磁吸出问题的无人机顶部,实现借力飞行,根据出现问题的无人机受损情况,进行返航或是重新归入编队。
20、优选的,所述信号传输器和gps定位器均内嵌安装于无人机本体顶部,所述无人机本体和信号传输器均内置安装有无线通讯模块。
21、优选的,所述距离传感器螺栓连接于无人机本体底部,且距离传感器底部设有测距镜头,为光线式传感器。
22、优选的,所述无人机本体底部固定连接有底架,所述电磁磁吸条安装于底架底部位置,所述无人机本体顶部螺栓连接有金属提手,且金属提手顶部设有开槽,所述电磁磁吸条通电状态下与金属提手顶部开槽适配插接磁吸。
23、本发明的有益效果:
24、1、本发明可通过在无人机内部内置局部的信号传输,形成无人机编队的网状网络搭建,然后通过选取主控无人机,然后利用信息传输之间的无人机网状网络,能够迅速的将控制指令扩散,无需控制全部无人机,同时桥接的方式,实现无人机群的监测控制,降低控制的成本和机能消耗,同时提升无人机编队的操控精度提升;
25、2、通过在无人机的距离传感器监测相互设备的实际距离,进而方便无人机机群的飞行分布更加的安全,并且通过间距传感器,更加精准的反馈飞行位置和状态,提升无人机编队的飞行安全和稳定。
26、本发明设计思路清晰,结构简洁,操作简单,解决了现有无人机的缺陷,具有很强的实用性。
- 还没有人留言评论。精彩留言会获得点赞!